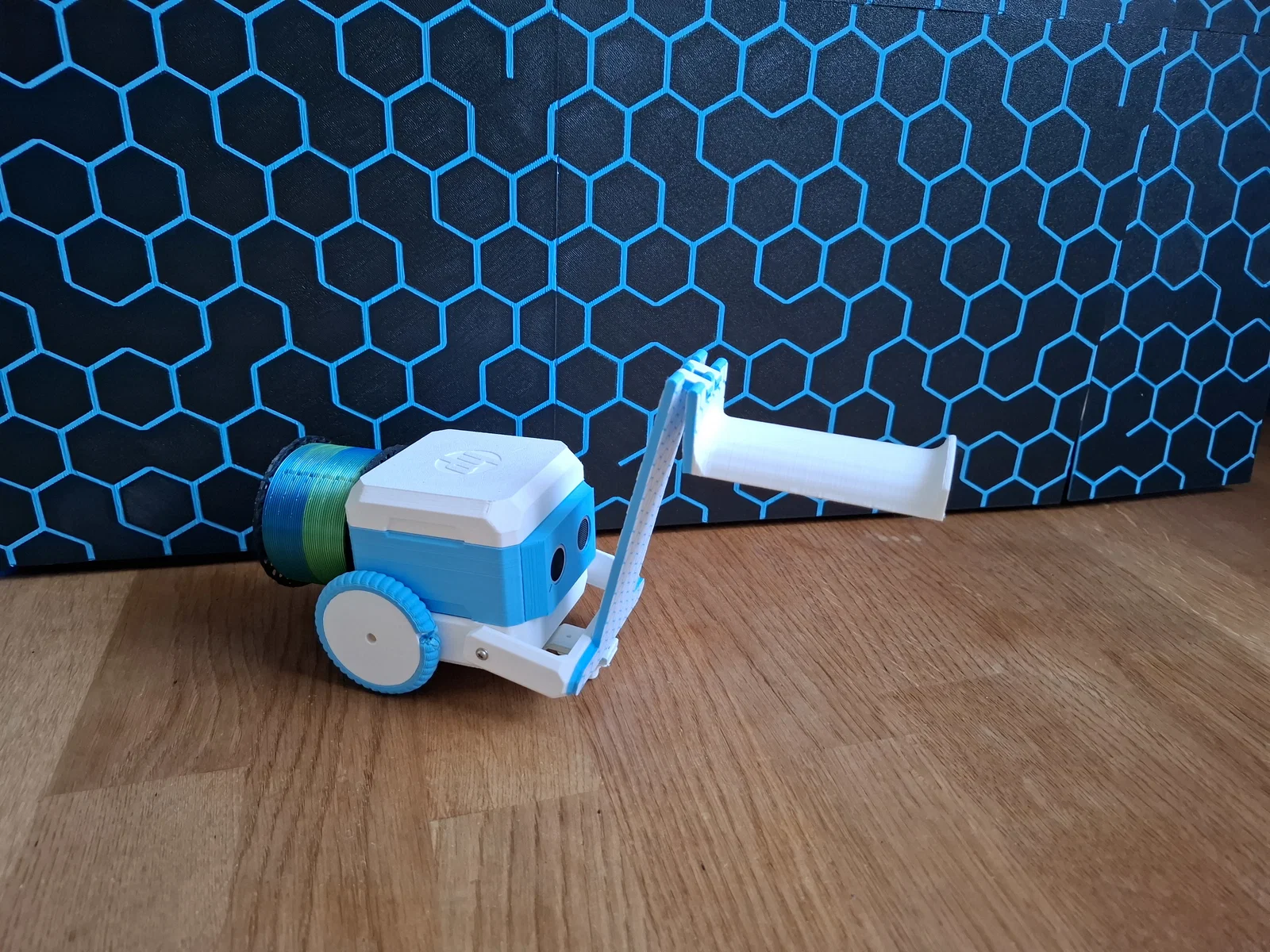
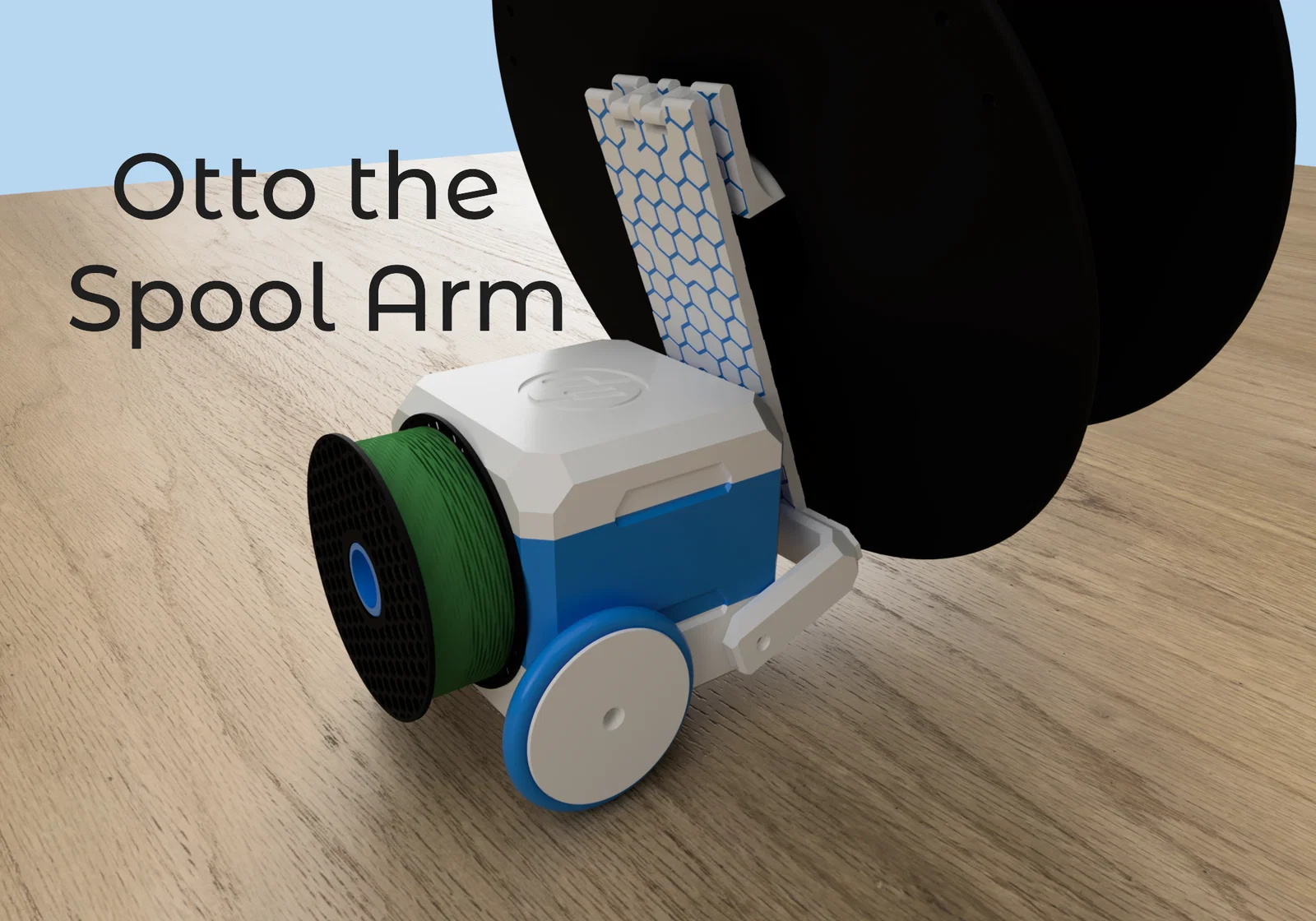
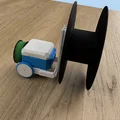
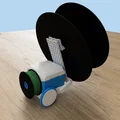
Otto the Spool Transporter - Robot vận chuyển cuộn nhựa cho Otto

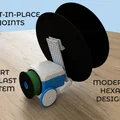
Đừng để những lõi nhựa rỗng làm bừa bộn bàn làm việc! Hãy nâng cấp Otto của bạn thành một robot vận chuyển hạng nặng với thiết kế Print-in-Place, họa tiết Hex-Grid bắt mắt và hệ thống đối trọng thông minh giúp ổn định khi vận hành.


















Mô tả
Biến Otto thành trợ lý xưởng in hữu ích!
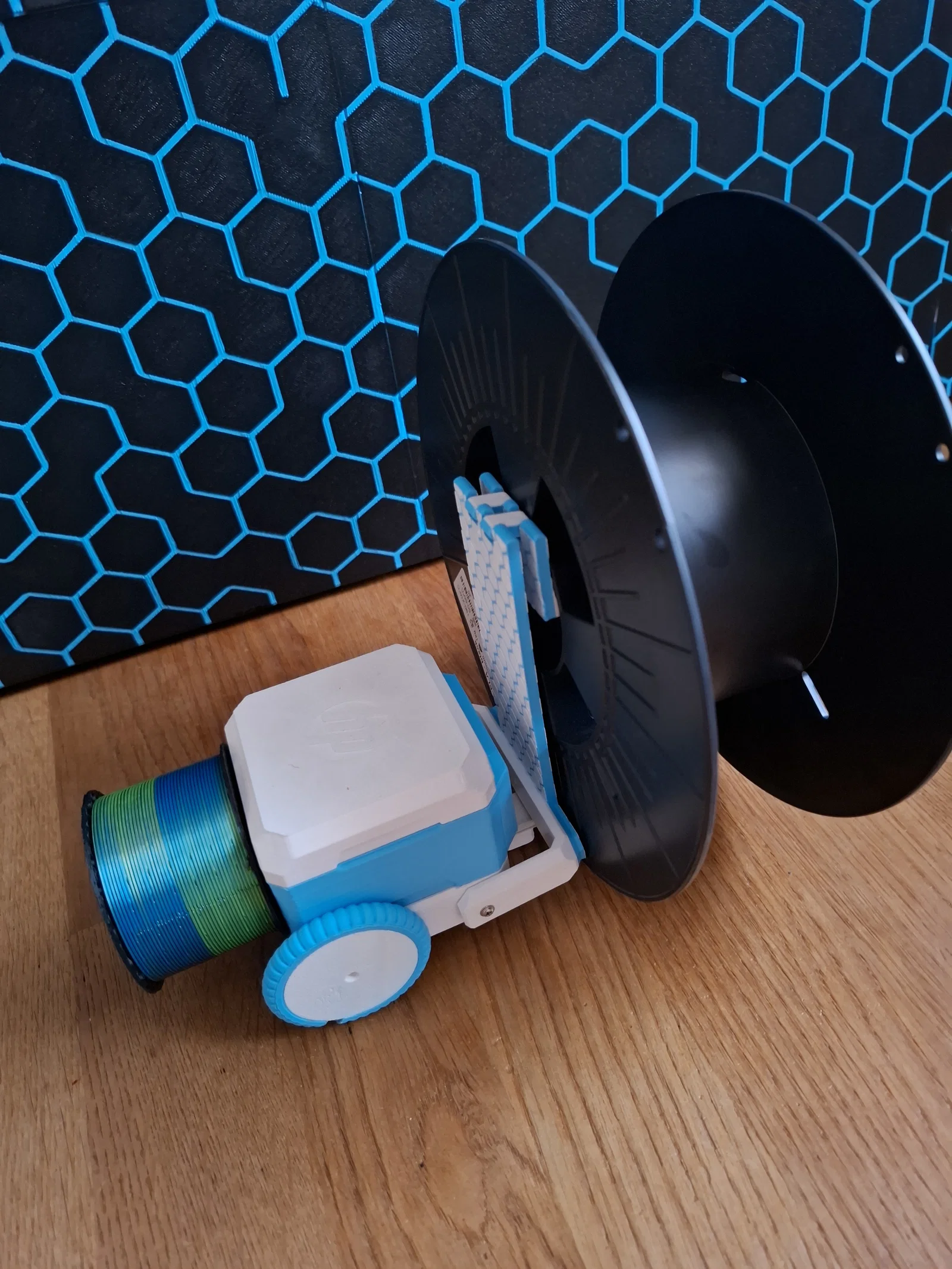
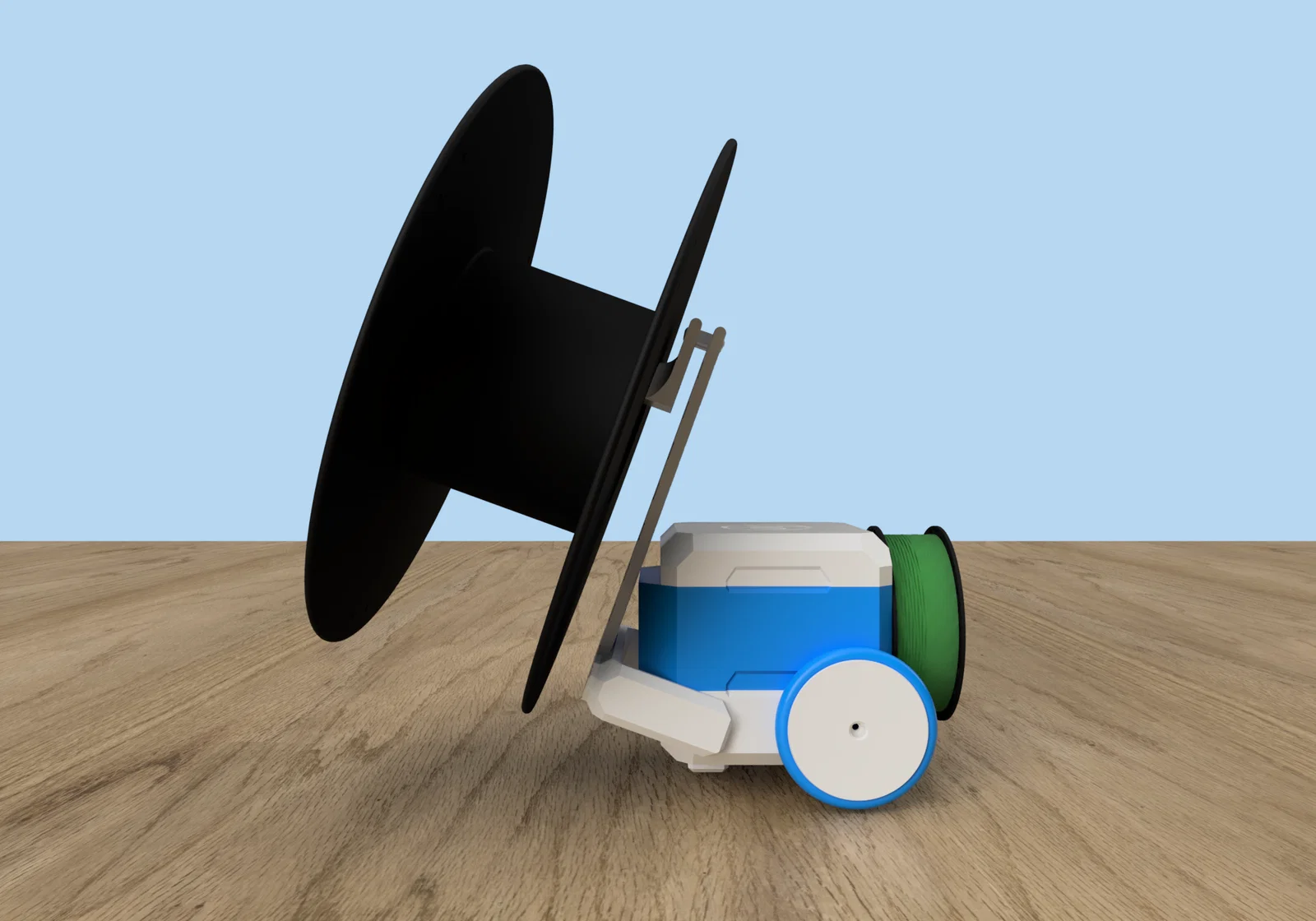
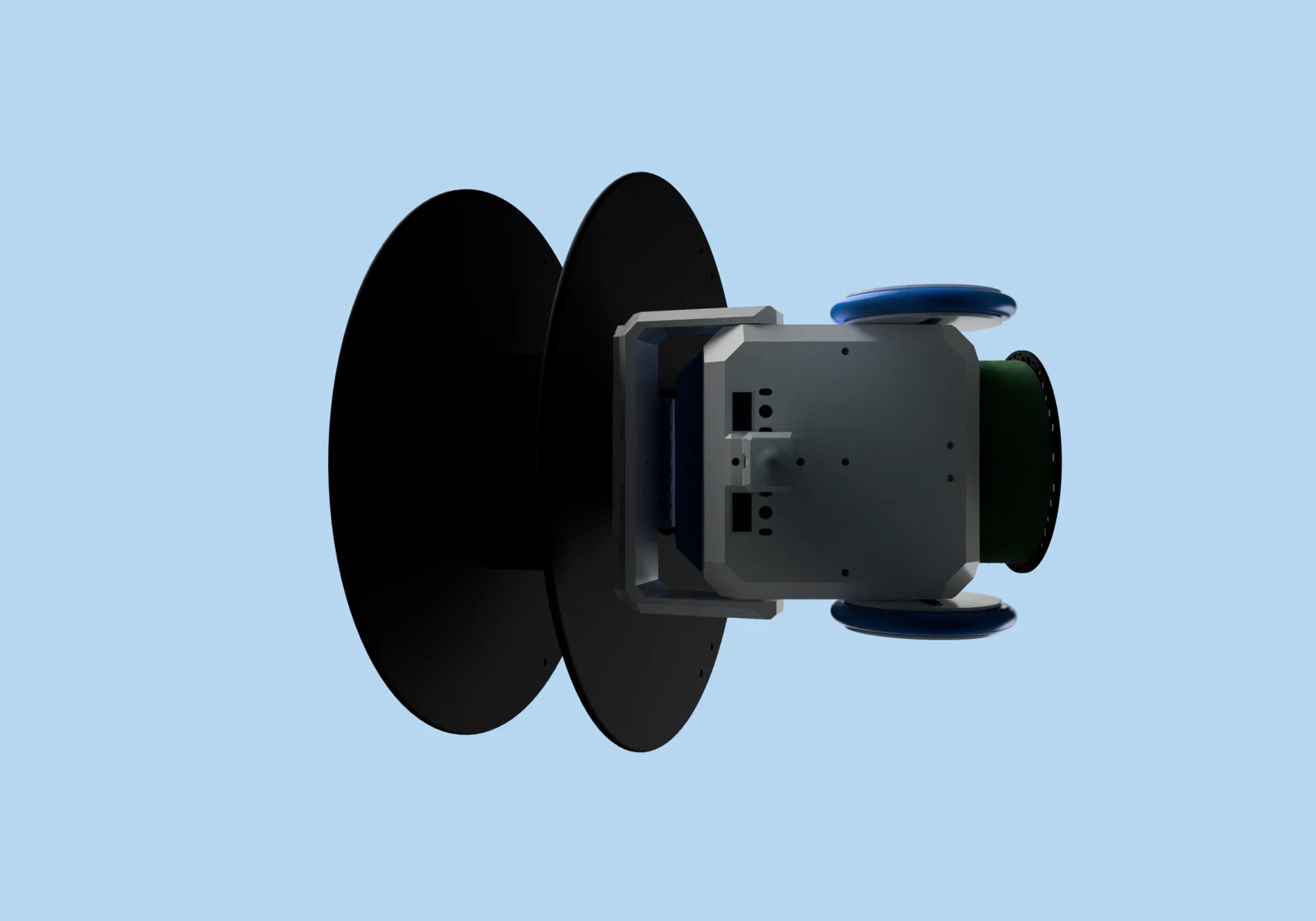
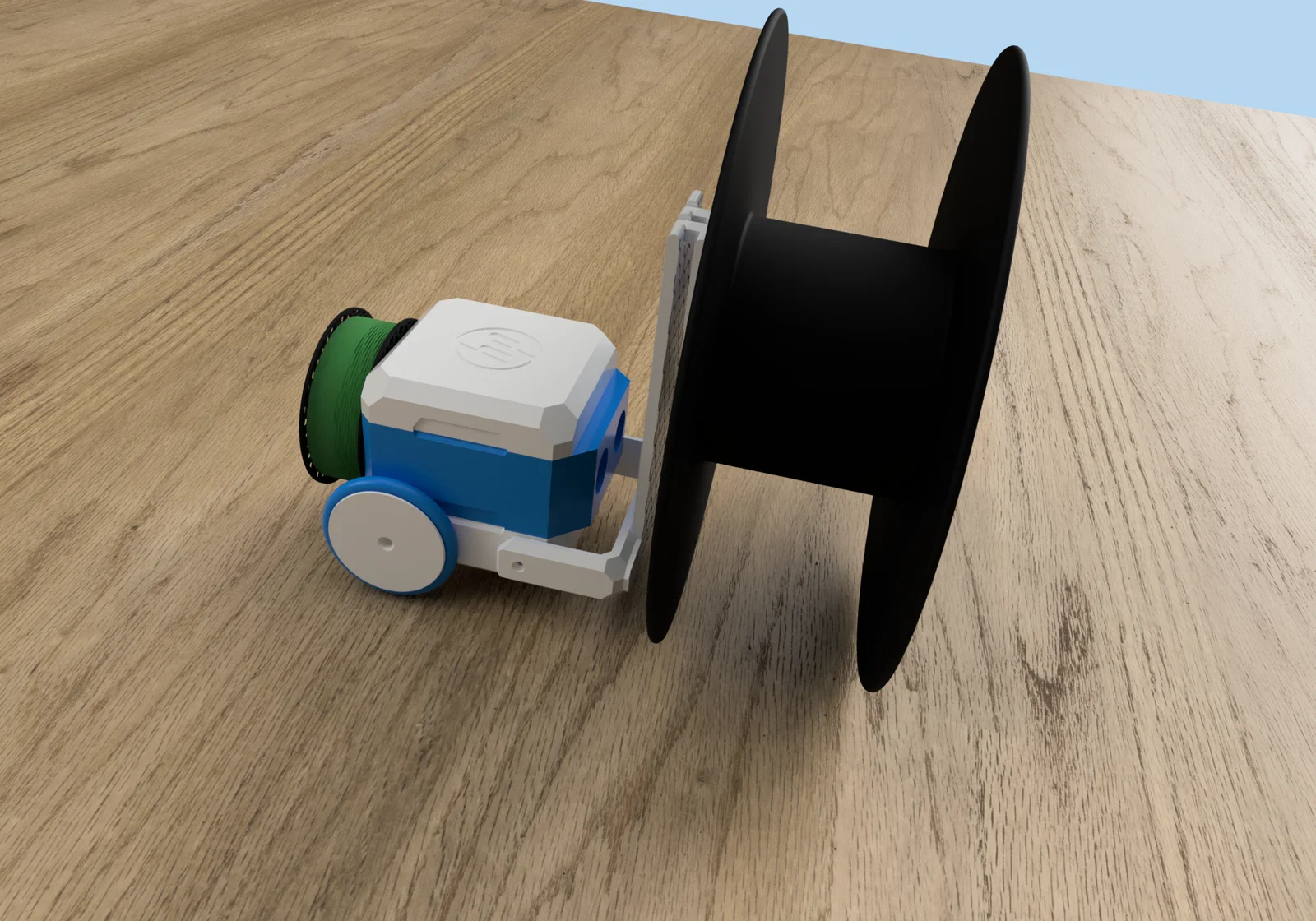
Nâng cấp Otto thành robot vận chuyển cuộn nhựa với hệ thống đối trọng giúp di chuyển cực kỳ ổn định.
CẬP NHẬT (Ngày 30/3): Giờ đây đã hỗ trợ nhiều kích cỡ đối trọng khác nhau (21, 28, 35 và 42 đai ốc M8) để đảm bảo độ cân bằng hoàn hảo cho mọi loại lõi nhựa rỗng trên thị trường!
Tính năng nổi bật:
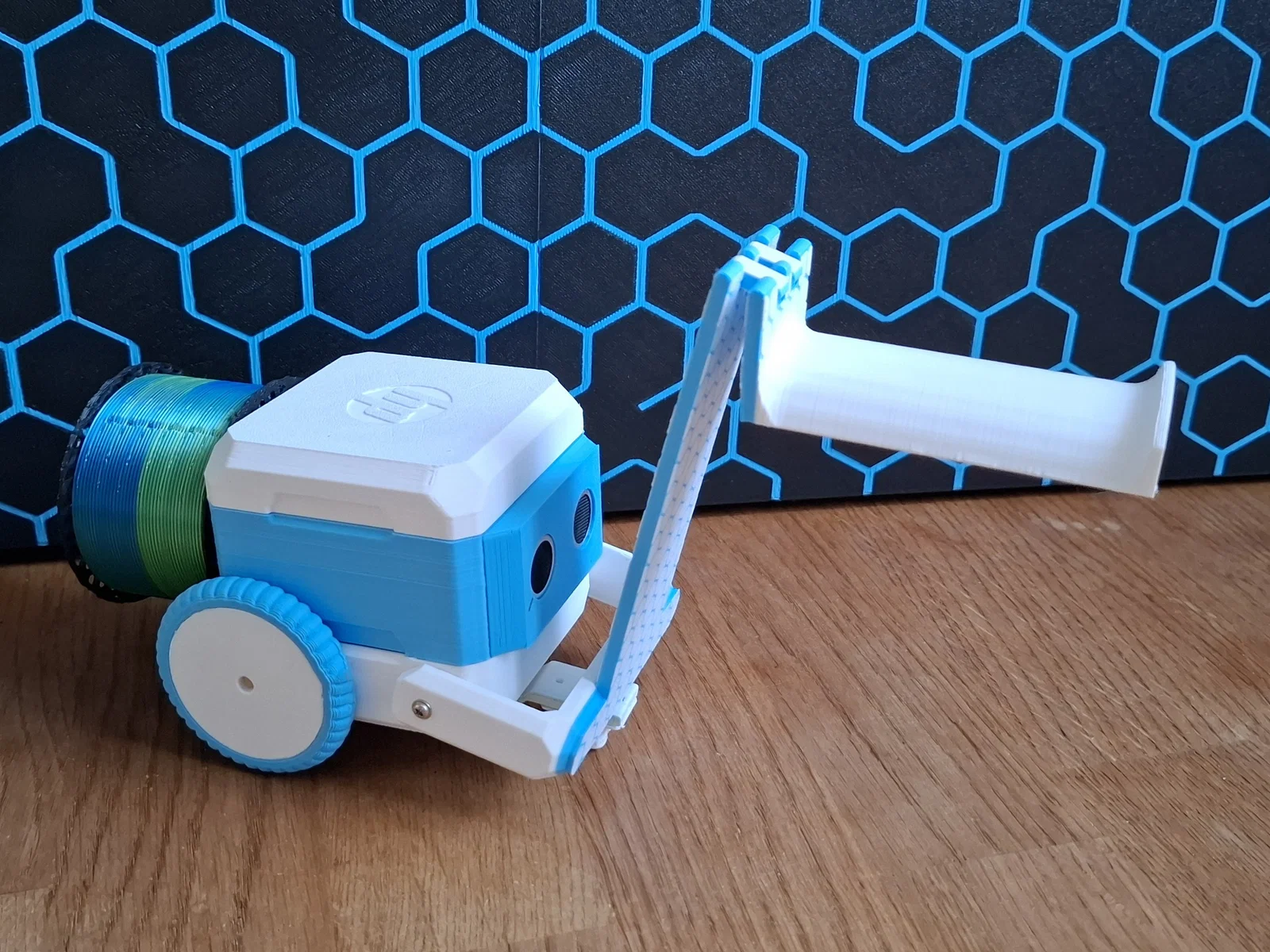
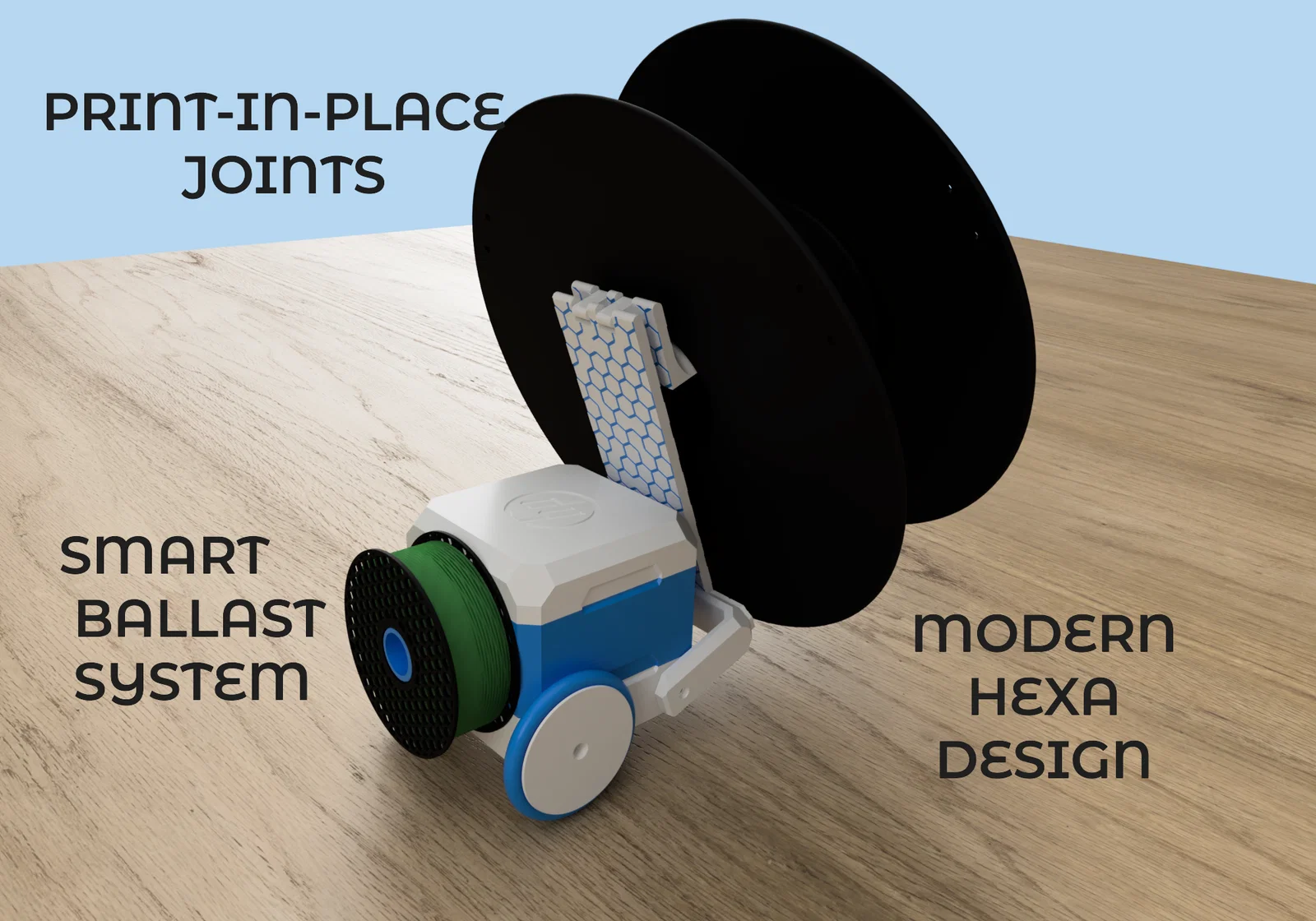
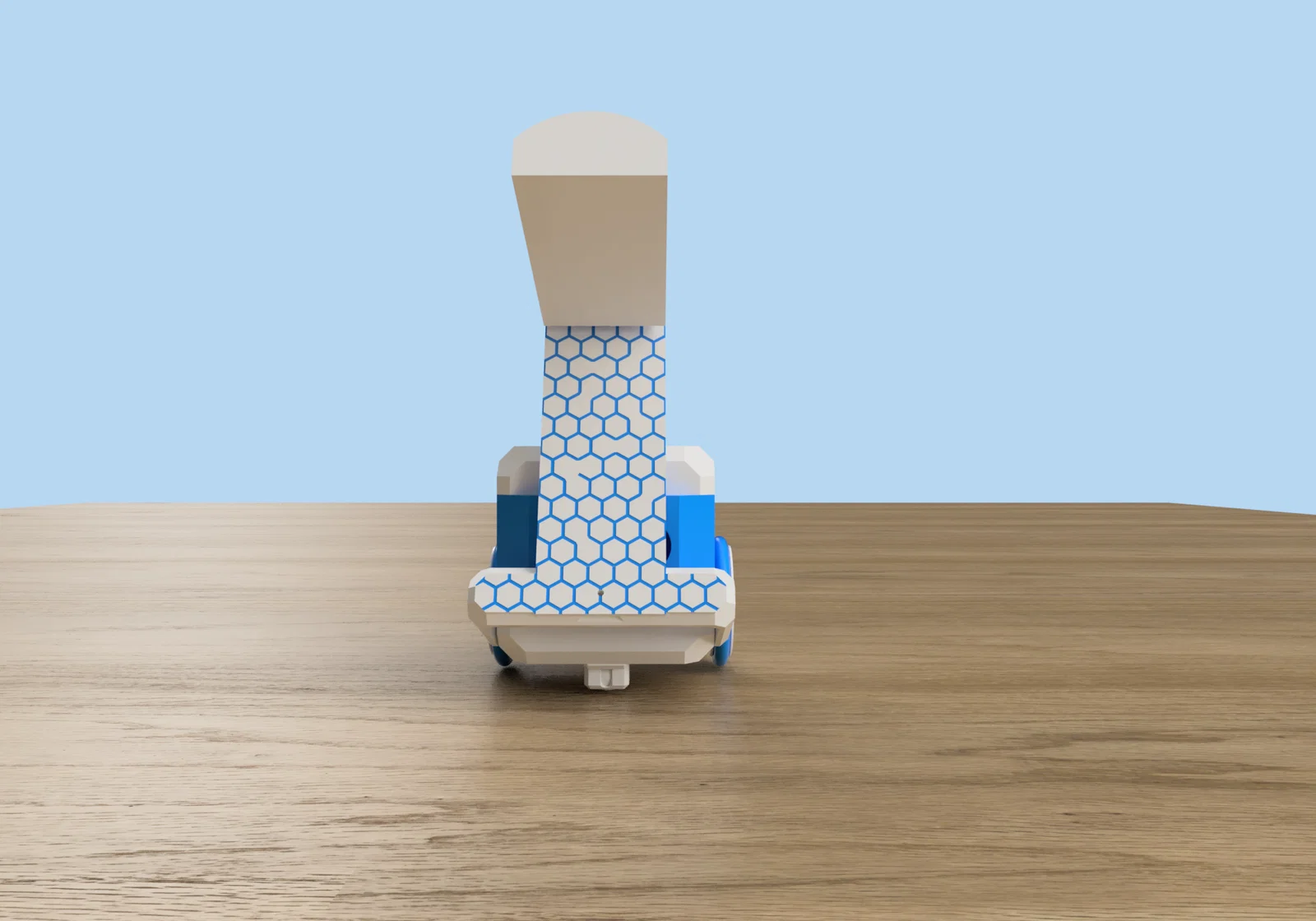
- Thiết kế Print-in-Place: Không cần lắp ráp cầu kỳ! Hệ thống khớp nối được thiết kế để in thành một khối hoàn chỉnh—phù hợp cho cả người mới bắt đầu lẫn chuyên gia.

-
Vận hành bằng Servo: Hoàn toàn tương thích với bộ kit mở rộng của Otto. Cơ chế nâng hạ được điều khiển bởi servo tiêu chuẩn, giúp tự động hóa việc quản lý cuộn nhựa.
-
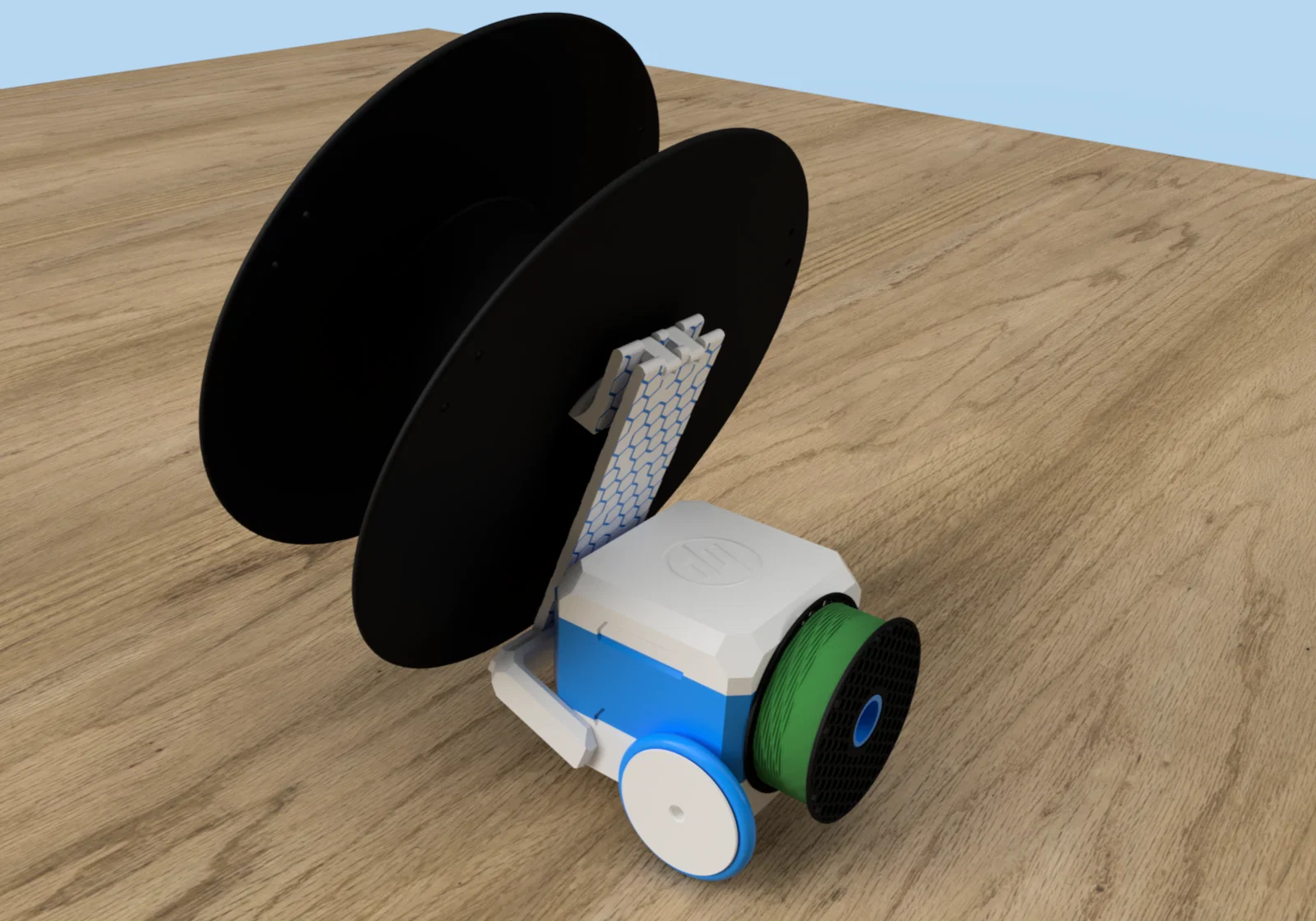
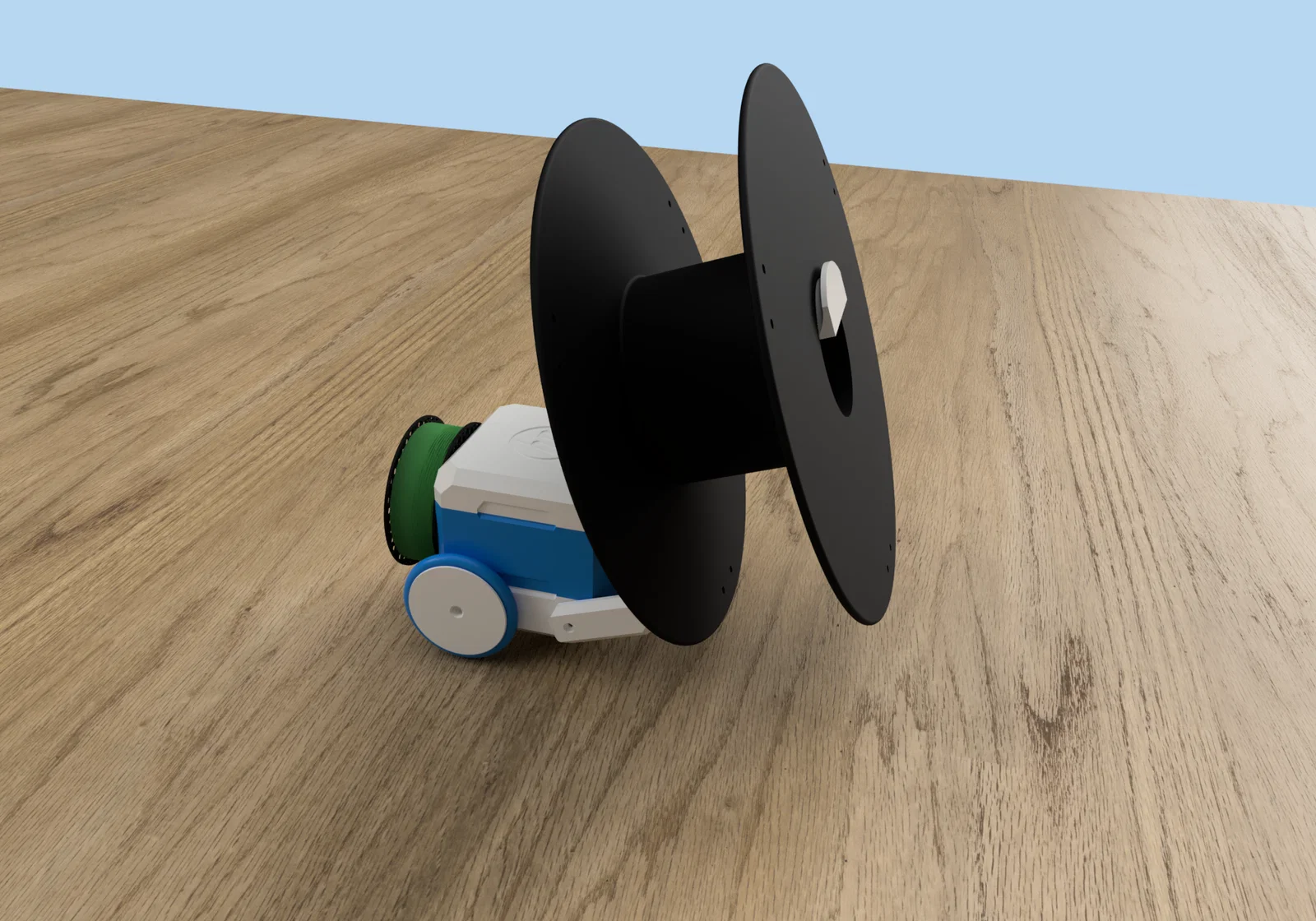
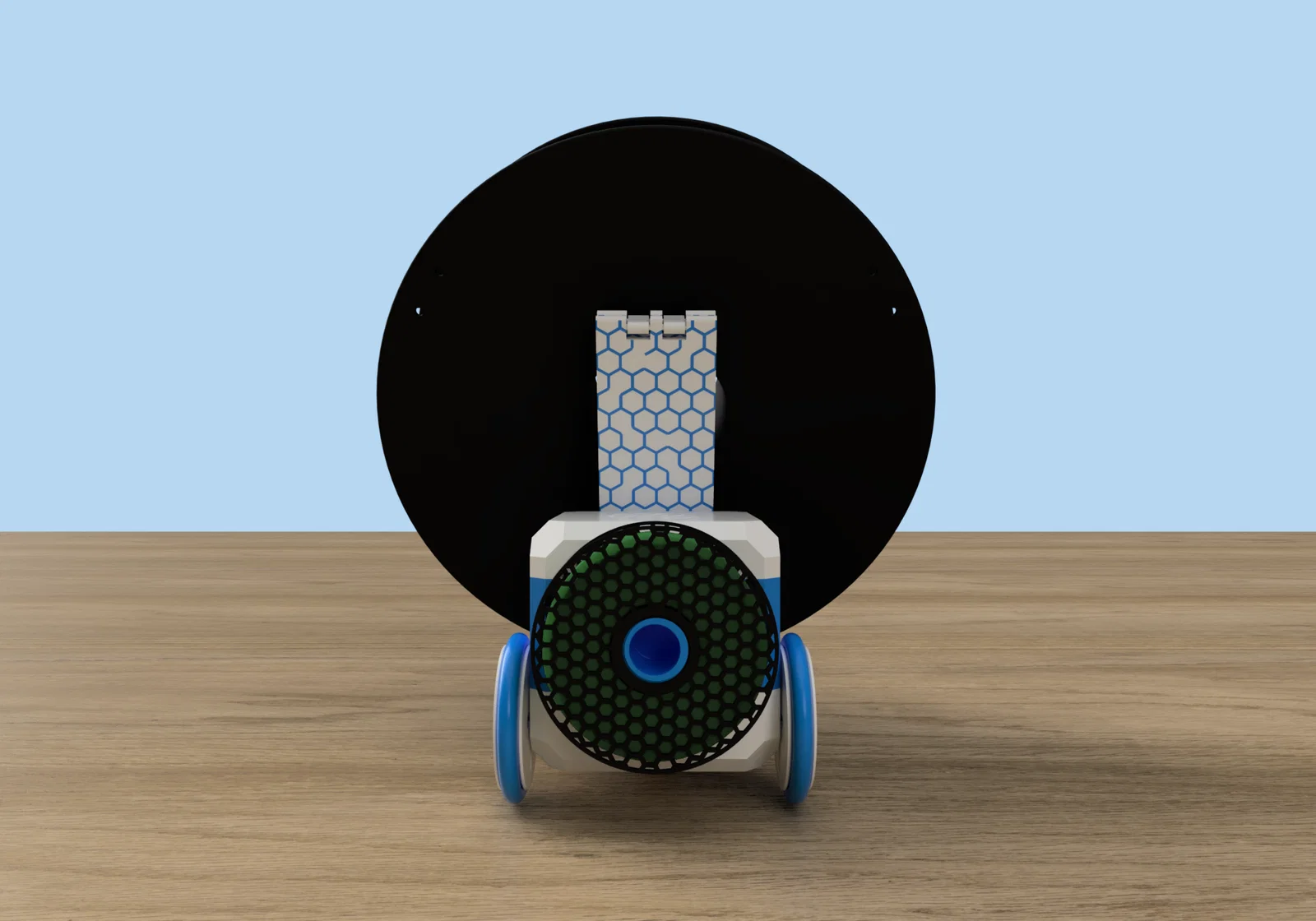
Hệ thống đối trọng thông minh: Để giúp Otto ổn định khi mang vác vật nặng, bản độ này bao gồm một đối trọng "Cuộn nhựa" đầy phong cách bắt vít sau lưng. Mẹo nhỏ: Vật này cũng có thể dùng làm chặn giấy trên bàn hoặc làm đế cho các phụ kiện module trong tương lai!

-
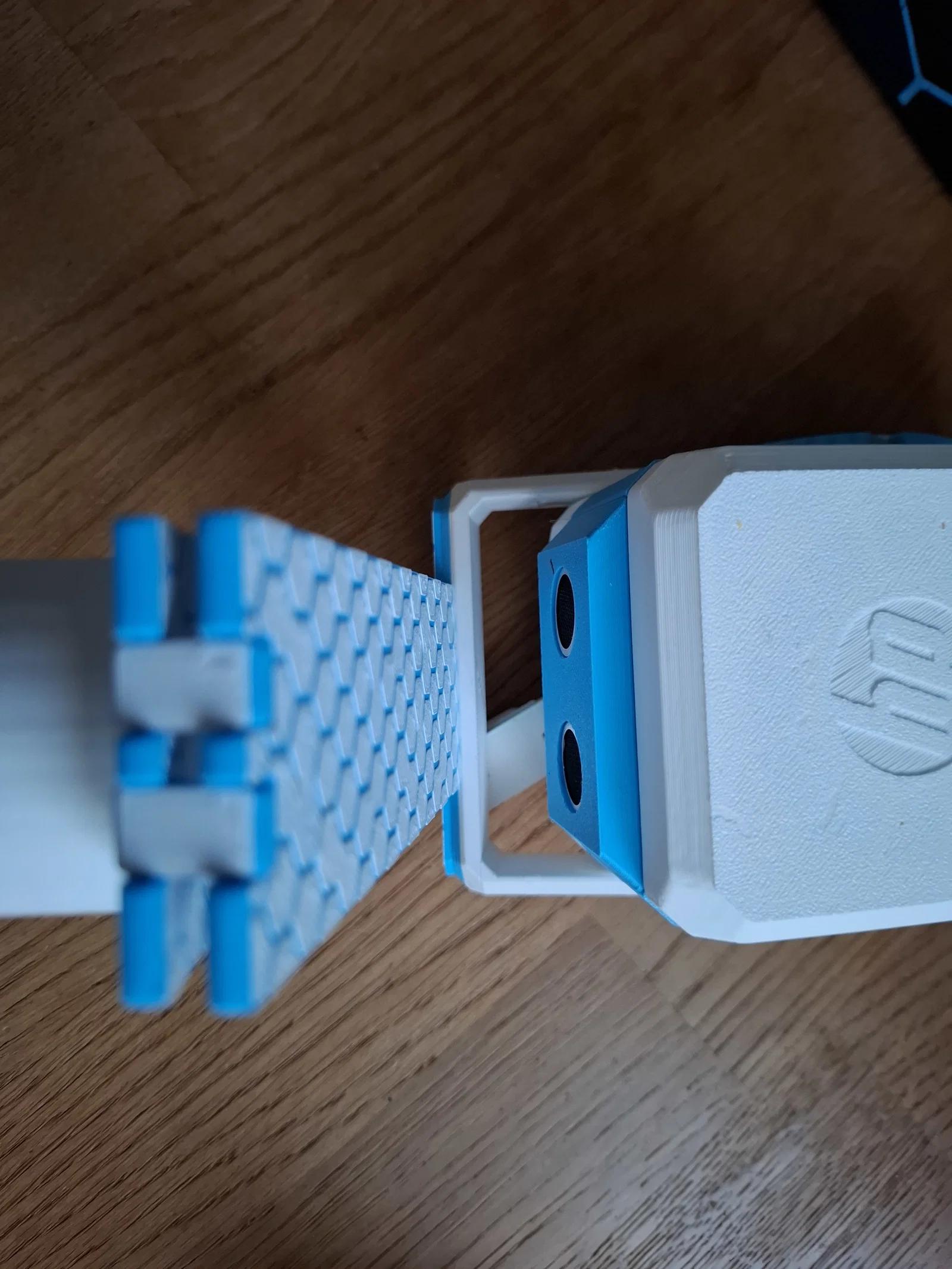
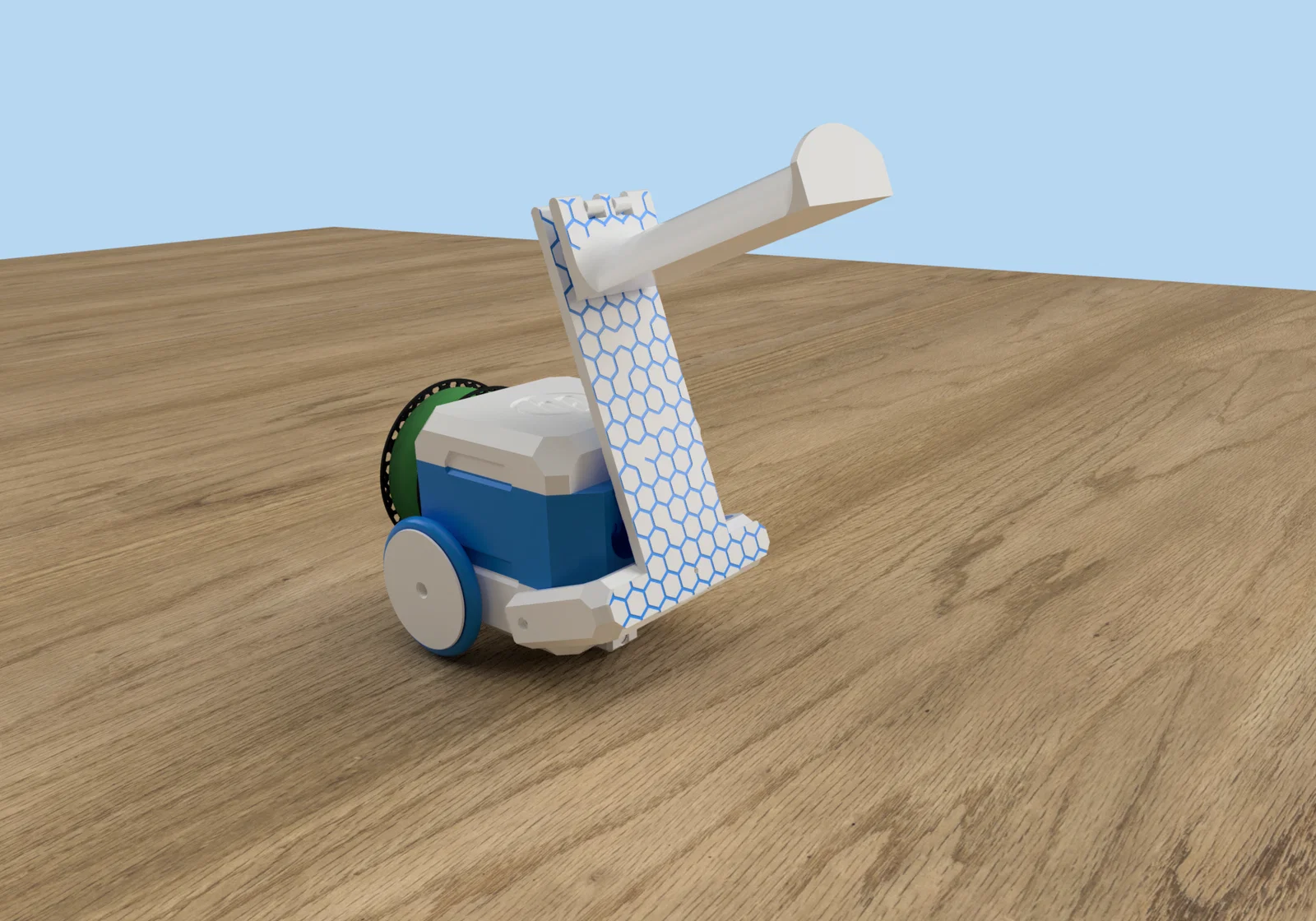
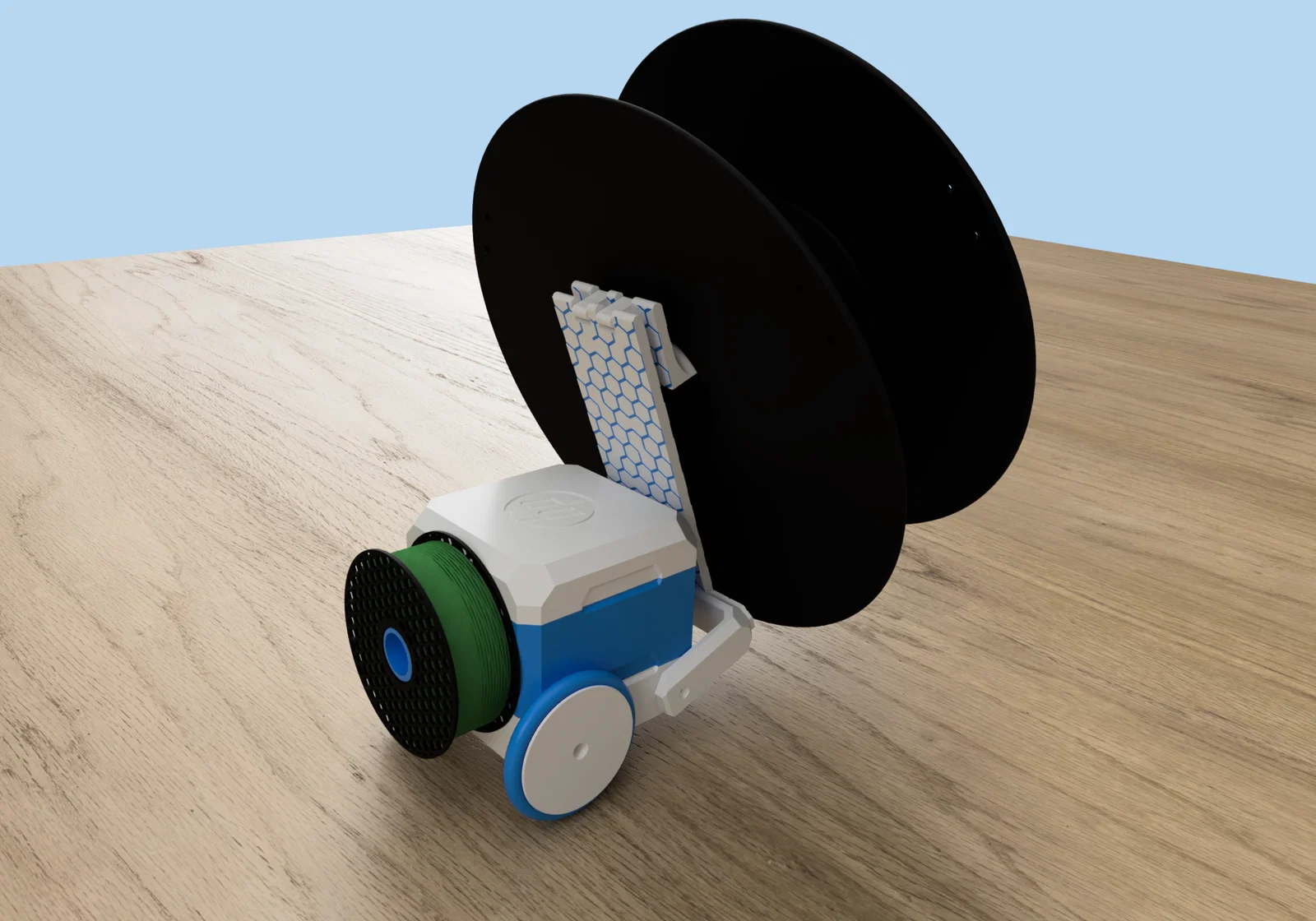
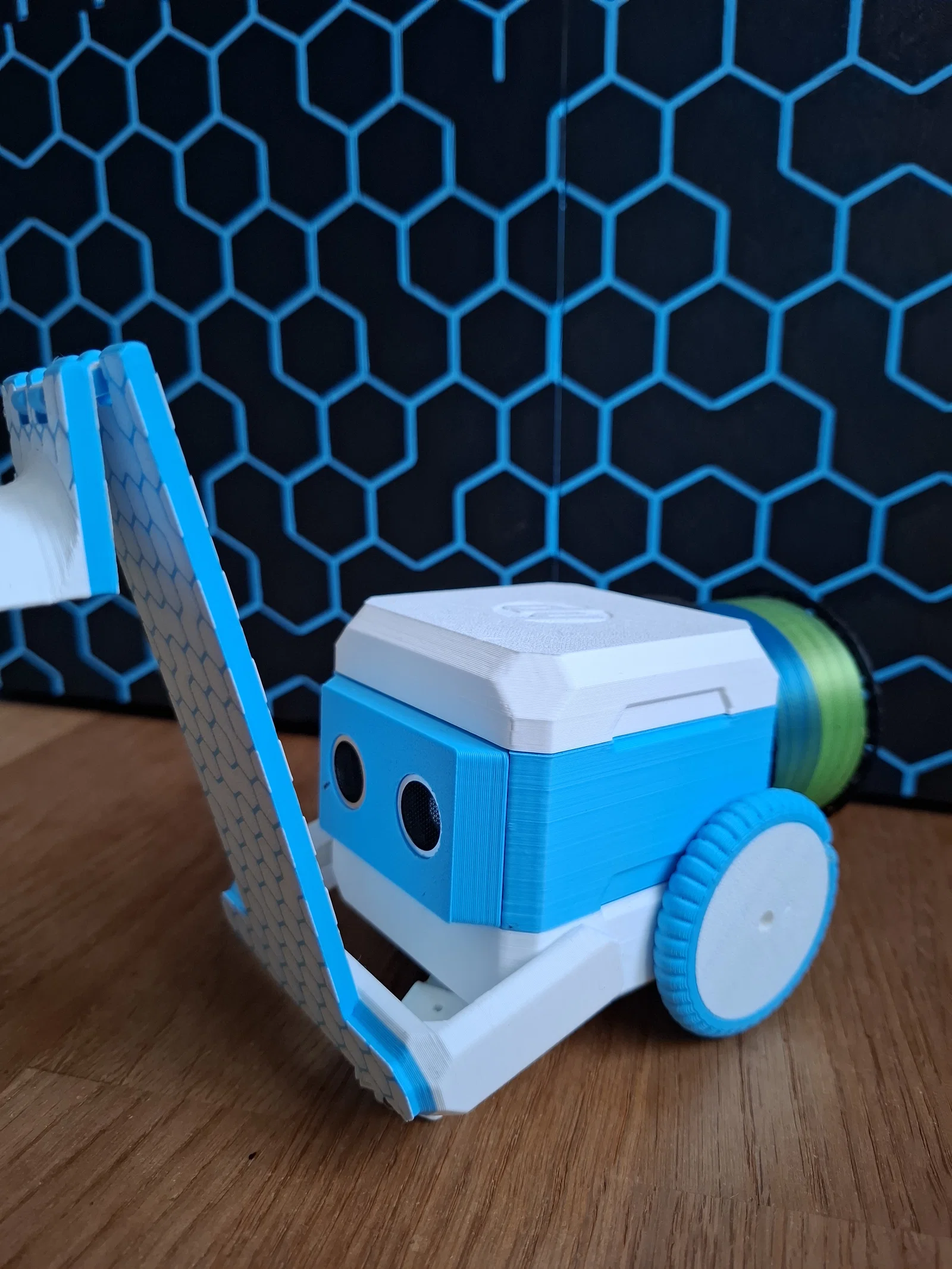
Thẩm mỹ mạnh mẽ: Cánh tay sở hữu họa tiết Hex-Grid hiện đại. Không chỉ để tăng độ cứng cáp, họa tiết này còn được tối ưu để tạo vẻ ngoài hai màu bắt mắt ngay cả khi không có MMU (chỉ cần đổi màu nhựa ở một độ cao lớp in nhất định).

Hướng dẫn sử dụng:
- Gắn cánh tay vào Otto (yêu cầu có Servo).
- Vặn đối trọng hình cuộn nhựa vào phía sau.
- Lập trình để Otto di chuyển, móc và vận chuyển!
Phần cứng yêu cầu:
- 21x Đai ốc M8 (Hex Nuts): Dùng làm đối trọng bên trong. Điều này đảm bảo Otto luôn đứng vững ngay cả khi chở những cuộn nhựa rỗng nặng nhất!
Phần mềm & Điều khiển
Tùy chỉnh chuyển động linh hoạt! Vì mỗi thương hiệu nhựa có kích thước và trọng lượng khác nhau, cánh tay này được thiết kế để dễ dàng căn chỉnh.
-
Điều khiển: Cánh tay sử dụng một servo tiêu chuẩn từ bộ kit mở rộng Otto.
-
Lập trình: Bạn có thể dùng HP Robots Otto Web Blocks hoặc Arduino IDE. Chỉ cần lập trình servo xoay đến góc "nhấc" và "vận chuyển" mà bạn mong muốn.
-
Mẹo: Hãy bắt đầu với tốc độ servo chậm để đảm bảo nâng hạ mượt mà và giữ trọng tâm ổn định!
-
-
Câu chuyện: Tại sao mình chế tạo Spool Transporter?
"Bàn làm việc của mình thường xuyên bừa bộn vì các cuộn nhựa rỗng, và mình nhận ra Otto chỉ đứng nhìn đống lộn xộn đó. Mình muốn giao cho chú ấy một công việc thực thụ! Mình đã thử thách bản thân thiết kế một bản nâng cấp cơ khí hiệu năng cao, kiểm tra giới hạn của kỹ thuật Print-in-Place nhưng vẫn dễ tiếp cận với mọi người. Kết quả? Một trợ lý mạnh mẽ, cá tính giúp biến việc dọn dẹp xưởng in thành một màn trình diễn robot thú vị."
Thiết lập in
- Độ cao lớp in (Layer Height): 0.15 mm (khuyên dùng để khớp nối hoạt động trơn tru)
- Số đường biên (Perimeters): 3
- Độ đặc (Infill): 20% (dạng Grid hoặc Gyroid)
- Support: KHÔNG (được thiết kế để không cần dùng support!)
- Chất liệu: PLA hoặc PETG
- Mẹo về màu sắc: Để tạo hiệu ứng Hex-Grid, hãy cài đặt đổi màu nhựa trong slicer ở lớp mà lưới bên trong bắt đầu xuất hiện để có vẻ ngoài hai màu cực chất.
Câu hỏi thường gặp (FAQ):
- Hỏi: Nó có chở được cuộn nhựa đầy không?
- Đáp: Không, thiết kế này dành riêng cho các cuộn nhựa rỗng.
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!