Mô hình cánh tay robot 3D linh hoạt tự lắp ráp
Bạn đang tìm kiếm một dự án in 3D đầy thử thách và mang tính giáo dục cao? Mô hình cánh tay robot 3D (arm robot 3d) này chính là lựa chọn hoàn hảo dành cho bạn. Được thiết kế với cấu trúc khớp nối linh hoạt, mô hình này không chỉ là vật trang trí ấn tượng mà còn là nền tảng tuyệt vời để bạn tích hợp các thiết bị điện tử, servo và bo mạch điều khiển nhằm tạo ra một chú robot thực thụ. Đây là công cụ hữu ích cho việc học tập về kỹ thuật, cơ khí và lập trình tự động hóa. Hãy cùng in ấn và lắp ráp để tự mình khám phá nguyên lý vận hành của các loại cánh tay robot công nghiệp thu nhỏ. Chúng tôi cung cấp các hướng dẫn chi tiết về chất liệu nhựa, cách thiết lập mật độ in và hỗ trợ cần thiết để bạn hoàn thiện sản phẩm một cách chuyên nghiệp nhất ngay tại nhà.
Mô tả
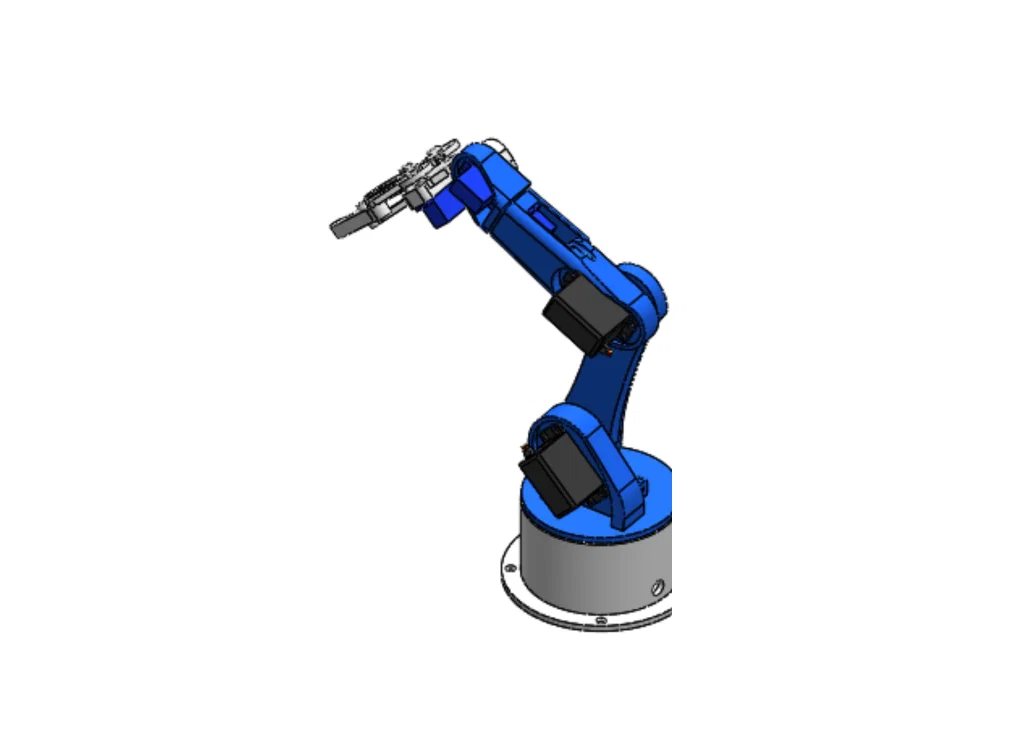
Mô hình cánh tay robot 3D linh hoạt cho người đam mê kỹ thuật. Cánh tay robot luôn là một trong những dự án thú vị và đầy thử thách nhất đối với bất kỳ ai đam mê in 3D và tự động hóa. Với thiết kế mô phỏng các cánh tay công nghiệp thực thụ, mô hình "arm robot 3d" này mang đến cho bạn cơ hội tuyệt vời để tìm hiểu về cơ cấu vận hành, các khớp nối và cách điều khiển chuyển động trong không gian. Đây không chỉ là một sản phẩm trang trí đẹp mắt trên bàn làm việc mà còn là một bộ khung cứng cáp để bạn có thể gắn thêm các thiết bị servo, bộ điều khiển như Arduino hoặc Raspberry Pi để hiện thực hóa ý tưởng robot của riêng mình. Nhờ thiết kế các khớp nối tinh tế, mô hình cho phép thực hiện các chuyển động gập, duỗi và xoay linh hoạt, giúp bạn dễ dàng nghiên cứu hoặc trình diễn khả năng vận hành của cánh tay robot trong môi trường giáo dục hoặc sáng tạo cá nhân. Bạn có thể tận dụng mô hình này để lắp ráp, tùy chỉnh các linh kiện bên trong và phát triển các ứng dụng như gắp đồ vật nhẹ hoặc thực hiện các chuỗi lệnh lập trình phức tạp. Việc tự tay in và lắp ráp từng bộ phận sẽ giúp bạn hiểu sâu sắc hơn về cấu tạo cơ khí, từ đó nâng cao kỹ năng tư duy kỹ thuật và giải quyết vấn đề. Dưới đây là những lưu ý quan trọng để bạn có kết quả in tốt nhất: - Sử dụng nhựa PLA hoặc PETG để đảm bảo độ bền và độ cứng cho các khớp nối quan trọng. - Nên thiết lập mật độ lấp đầy (infill) khoảng 30% đến 40% để tăng khả năng chịu lực cho các bộ phận tay đòn. - Sử dụng hỗ trợ (support) hợp lý tại các vị trí khớp nối để đảm bảo bề mặt sau khi in được mịn màng, giúp việc lắp ráp các chi tiết cơ khí được trơn tru và không bị kẹt. - Layer height lý tưởng là 0.2mm để cân bằng tốt giữa thời gian in và độ chi tiết bề mặt. - Hãy chú ý kiểm tra dung sai các khớp nối trước khi in hàng loạt, bạn có thể cần điều chỉnh nhỏ trong file STL để các khớp khớp vào nhau vừa khít mà không quá lỏng lẻo. Hy vọng dự án này sẽ giúp bạn có những giây phút trải nghiệm công nghệ 3D thật sự thú vị và bổ ích.
Giấy phép

File mô hình






Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!