Cơ cấu khớp nối cầu chuyển động linh hoạt in 3D đa vật liệu

Khám phá mẫu in 3D cơ cấu khớp nối cầu chuyển động linh hoạt (Spherical Parallel Manipulator) với thiết kế đặc biệt tích hợp lớp PETG. Đây là dự án hoàn hảo cho những ai đang sử dụng máy in 3D đa vật liệu, giúp tận dụng ưu điểm độ cứng của PLA và độ dẻo dai của PETG để tạo ra khớp xoay bền bỉ, mượt mà. Sản phẩm này cực kỳ phù hợp để ứng dụng cho cánh tay robot, mô hình cơ khí phức tạp hoặc làm mô hình học tập về cơ học. Bài viết cung cấp hướng dẫn chi tiết về cách thiết lập vật liệu, cài đặt layer height và các lưu ý kỹ thuật cần thiết để in thành công mô hình này mà không gặp lỗi, đảm bảo khớp nối hoạt động ổn định và lâu dài.


Mô tả
Cơ cấu khớp nối cầu chuyển động linh hoạt (Spherical Parallel Manipulator)
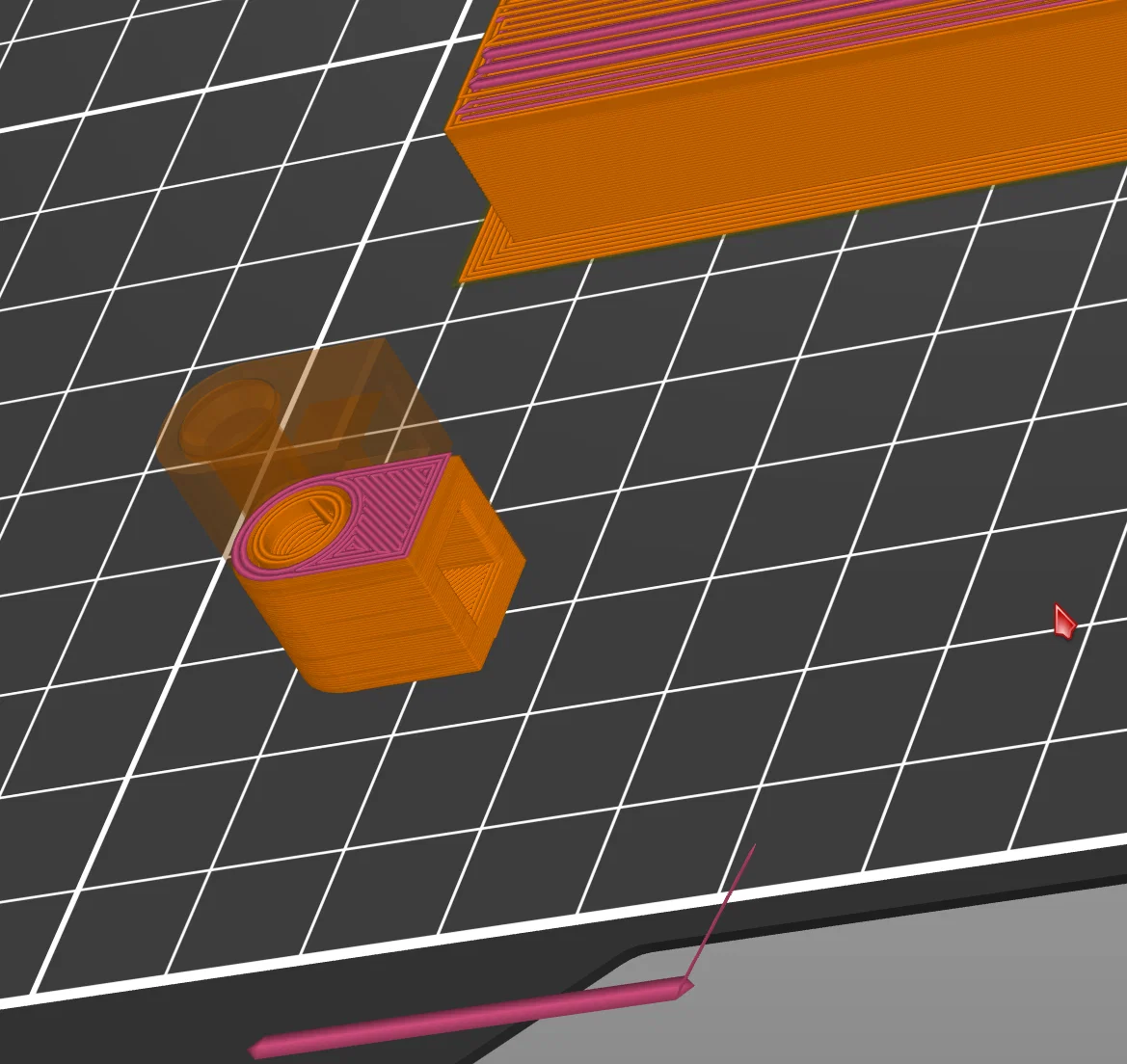
Cơ cấu này là một thiết kế kỹ thuật độc đáo, cho phép tạo ra chuyển động đa chiều linh hoạt thông qua các khớp nối đặc biệt được tích hợp sẵn lớp PETG trong quá trình in 3D. Đây là giải pháp sáng tạo dành cho những ai đam mê cơ khí và muốn khám phá khả năng in nhiều loại vật liệu trong cùng một sản phẩm. Bằng cách kết hợp độ cứng cáp của PLA với độ bền dẻo dai của PETG, khớp nối này hoạt động mượt mà hơn hẳn so với các loại khớp in bằng vật liệu nhựa đơn lẻ, giúp giảm thiểu ma sát và tránh tình trạng nứt gãy trong quá trình vận hành liên tục.
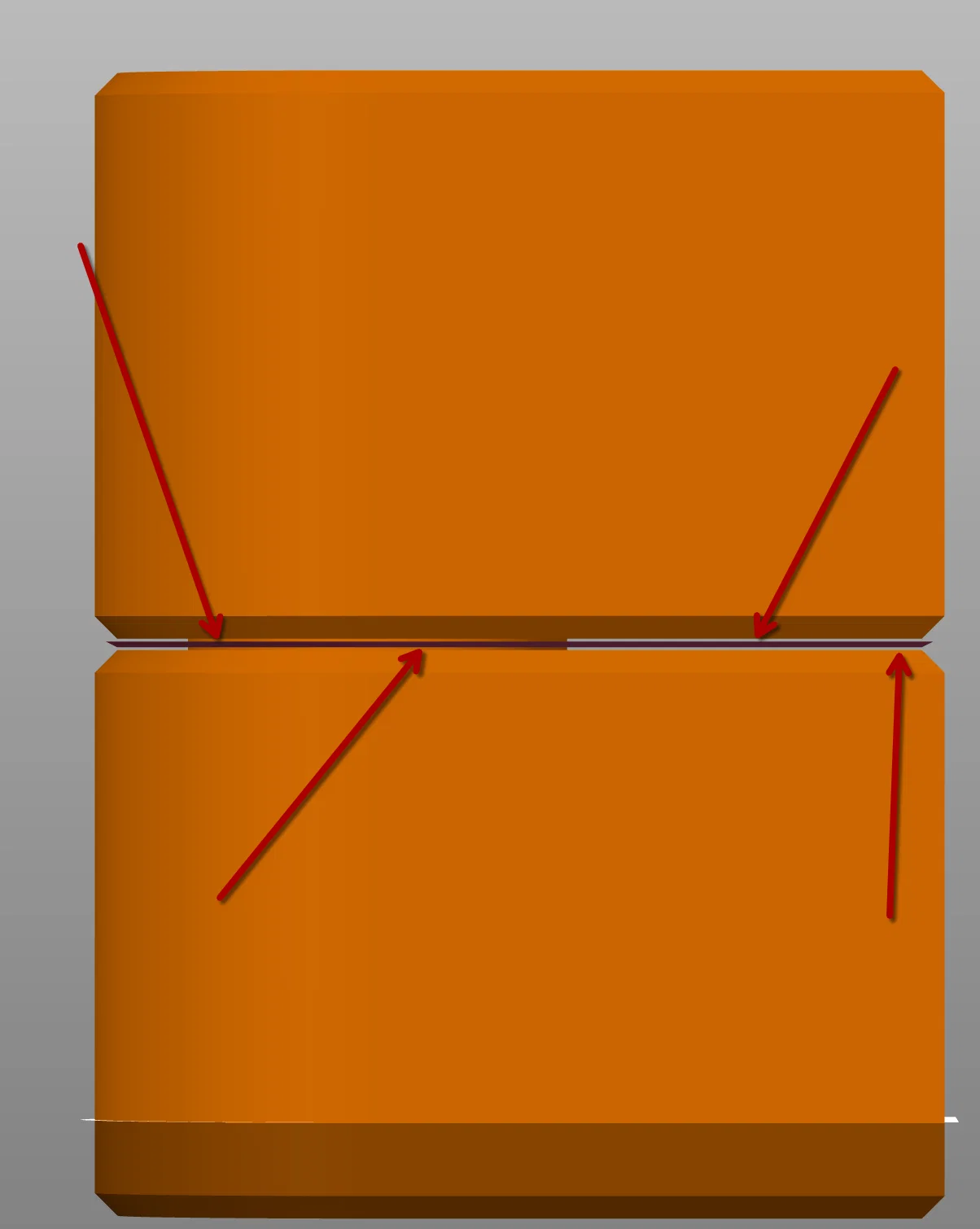
Việc in 3D một cơ cấu đòi hỏi độ chính xác cao như thế này yêu cầu máy in của bạn phải hỗ trợ in đa vật liệu (Multi-material) hoặc có khả năng tạm dừng in để thay đổi filament. Lớp PETG được chèn vào ngay tại vị trí khớp xoay đóng vai trò như một bộ phận đệm giảm chấn, giúp tăng tuổi thọ cho toàn bộ cấu trúc. Bạn có thể sử dụng mô hình này để ứng dụng trong các cánh tay robot nhỏ, các mô hình mô phỏng chuyển động hoặc đơn giản là để làm món đồ chơi công nghệ độc đáo trưng bày trên bàn làm việc.
Các đặc điểm kỹ thuật và lưu ý khi thực hiện:
- Chất liệu in: Khuyến khích sử dụng kết hợp PLA cho các phần thân cứng và PETG cho phần khớp nối để tối ưu hóa đặc tính cơ học.
- Kỹ thuật in: Cần cấu hình chính xác cho máy in đa vật liệu hoặc thao tác thay filament thủ công tại đúng layer thiết kế.
- Độ bền: Lớp PETG giúp khớp nối chịu được áp lực tốt hơn và linh hoạt hơn nhiều so với việc chỉ sử dụng PLA giòn.
- Layer height: Nên để layer height từ 0.15mm đến 0.2mm để đảm bảo độ chính xác cho các chi tiết khớp xoay phức tạp.
- Kiểm tra: Sau khi in xong, hãy nhẹ nhàng bẻ khớp để các lớp PETG làm quen với chuyển động trước khi đưa vào vận hành tải nặng.
- Ứng dụng thực tế: Phù hợp cho các dự án nghiên cứu về cơ khí, mô hình robot parallel manipulator hoặc các khớp nối cần độ tự do cao.
Đây là một mẫu in 3D thú vị thách thức kỹ năng thiết lập máy in của bạn, mang lại kết quả là một bộ phận cơ khí cực kỳ hữu ích và bền bỉ.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!