The Otto Arm - Cánh tay robot tương thích cho Otto

Cánh tay robot Otto in 3D với 4 bậc tự do, hoạt động dựa trên nền tảng rơ-moóc của Otto. Dễ dàng lắp ráp, sử dụng linh kiện Arduino cơ bản, mang lại trải nghiệm robot thú vị cho Otto.
130
Lượt Xem
10
Lượt Thích
8
Lượt Tải
Cập Nhật Apr 03, 2026









Mô tả
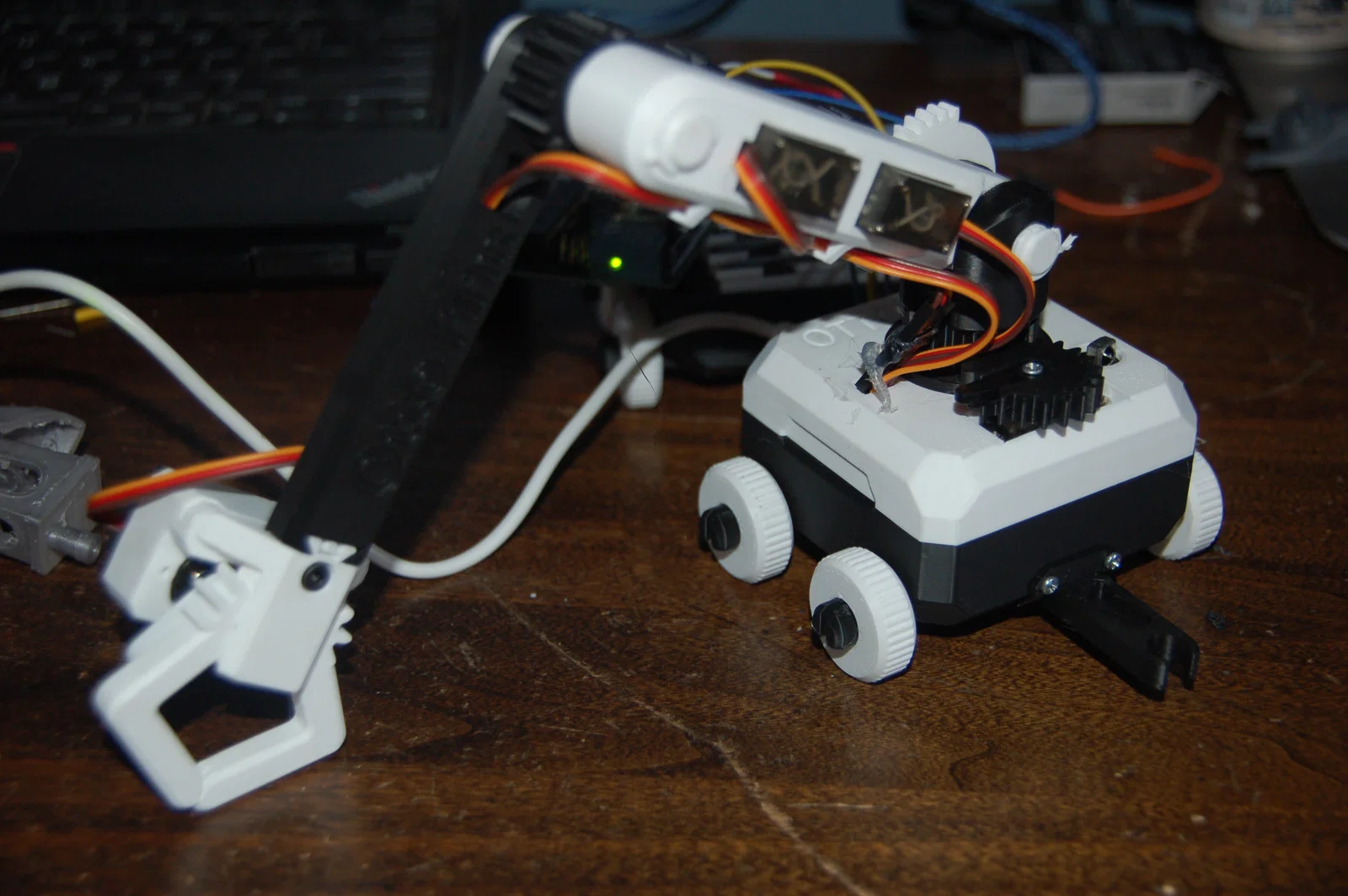
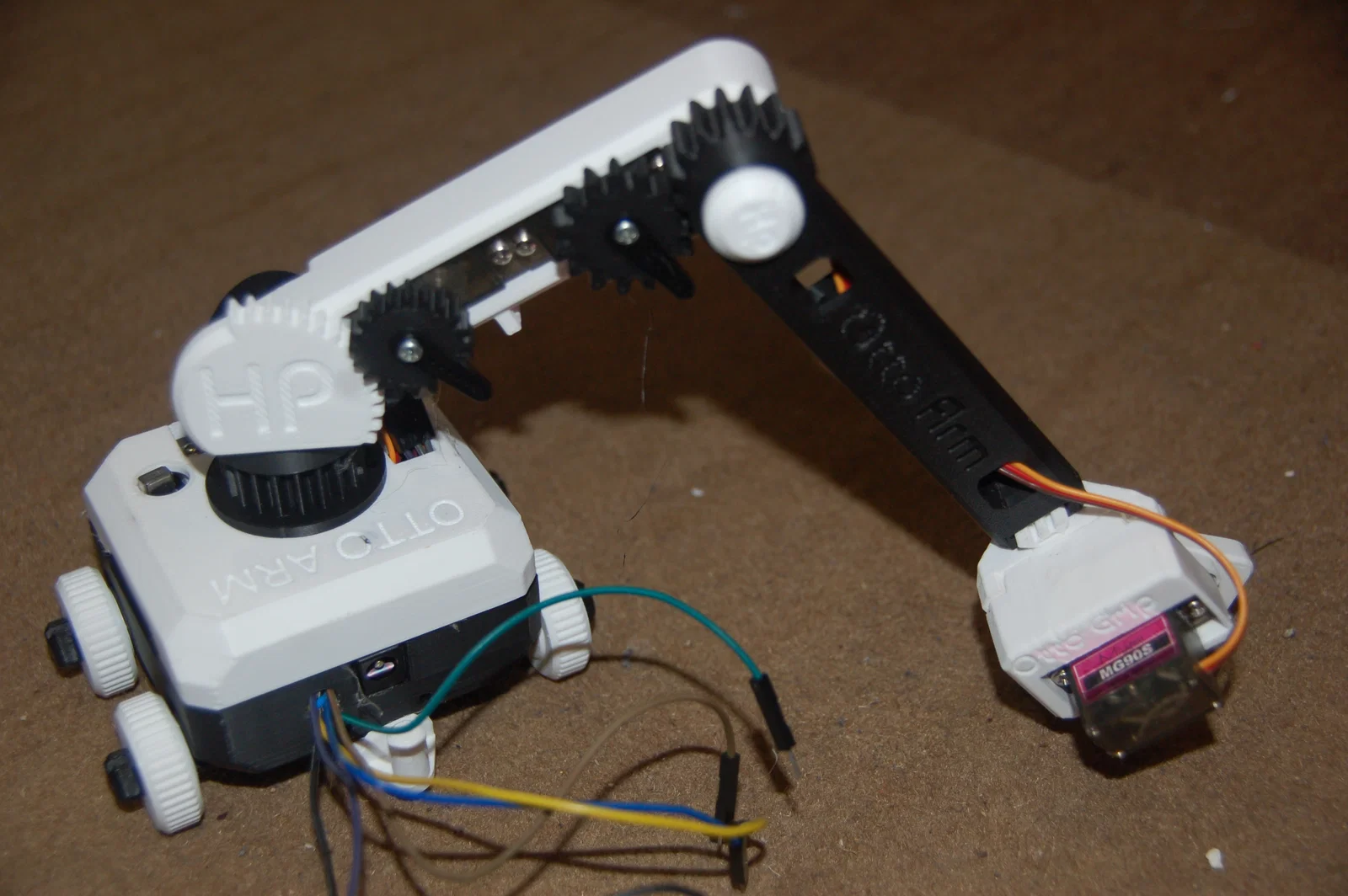
The Otto Arm
Cánh tay Otto là một cánh tay robot in 3D với 4 bậc tự do. Dự án này chỉ sử dụng phần cứng đi kèm với servo của bạn cộng thêm ba chiếc ốc vít nhỏ. Đây là một bước khởi đầu tuyệt vời để làm quen với các cánh tay robot nhỏ và nó hoàn toàn tương thích với hệ sinh thái Otto vì được thiết kế dựa trên phần rơ-moóc của Otto. Điều này có nghĩa là giờ đây bạn có thể kéo theo một cánh tay robot mini đầy đủ chức năng phía sau chú robot Otto của mình, biến Otto thành một "cánh tay đắc lực" thực thụ!
Linh kiện
- Nhựa in (Filament): 200g là quá đủ
- Servo 9 gram kèm phụ kiện x4 và cánh tay đòn (mình dùng Miuzei MG90S 9G Micro Servo)
- Remote hồng ngoại (IR remote)
- Cảm biến hồng ngoại (IR sensor)
- 2 ốc vít nhỏ để gắn khớp nối vào rơ-moóc, khoảng m2x7
- Một ốc vít m3x16 cho phần kẹp (gripper)
- Vi điều khiển như Arduino Nano, Esp32, Leonardo hoặc loại nhỏ tương đương (Uno r3 hoặc kích thước tương tự sẽ không vừa phần đế, nhưng bạn có thể đi dây bên ngoài)
- Jack nguồn 6mm
- Mạch ổn áp (buck converter) để hạ áp cho jack 5mm (nếu nguồn của bạn đã là 5v thì không cần)
- Nguồn điện - bộ chuyển đổi nguồn có jack 6mm HOẶC 4 pin AA/pin sạc với jack 6mm - mình đã dùng loại này và nó hoạt động rất tốt
- Dây điện để nối dài cáp servo
- Dây điện phù hợp cho nguồn servo
- Chân cắm (pin headers) để nối dây dễ dàng hơn
- Một chút khéo léo hoặc lòng can đảm để tự làm bộ dây nối cho 4 servo và cảm biến IR
Hướng dẫn in
- Tất cả các bộ phận đều vừa vặn với máy in Prusa Mini
- Mình in thành 3 mẻ với đầu phun 0.4mm, độ lấp đầy 15%, chiều cao lớp in 0.2mm, tốc độ tiêu chuẩn bằng nhựa PLA
- File cấu hình in (print profiles) cho Prusa mini đã đính kèm trong mục file
- Mẻ thứ 2 cần thêm support ở 3 vị trí. (xin lỗi nhé) Nếu in rời từng phần, hãy thêm support cho cánh tay thứ nhất và phần đế tay robot/mặt trên rơ-moóc. Để đặt support, hãy chọn chế độ painting, sau đó là smart fill, rồi chọn 3 vùng như hình minh họa.
- Mọi thứ khác đều không cần support, thật tuyệt vời!


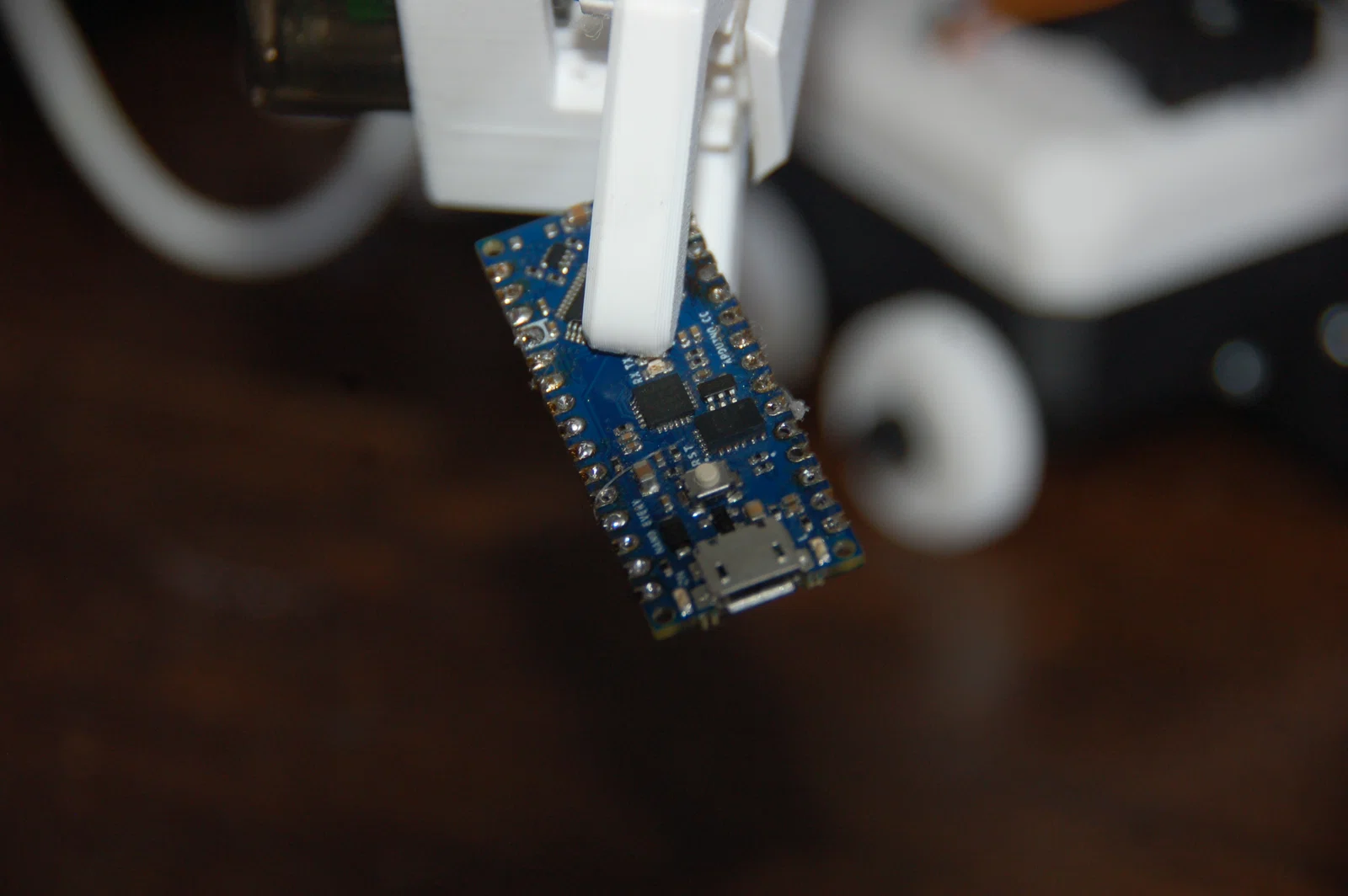
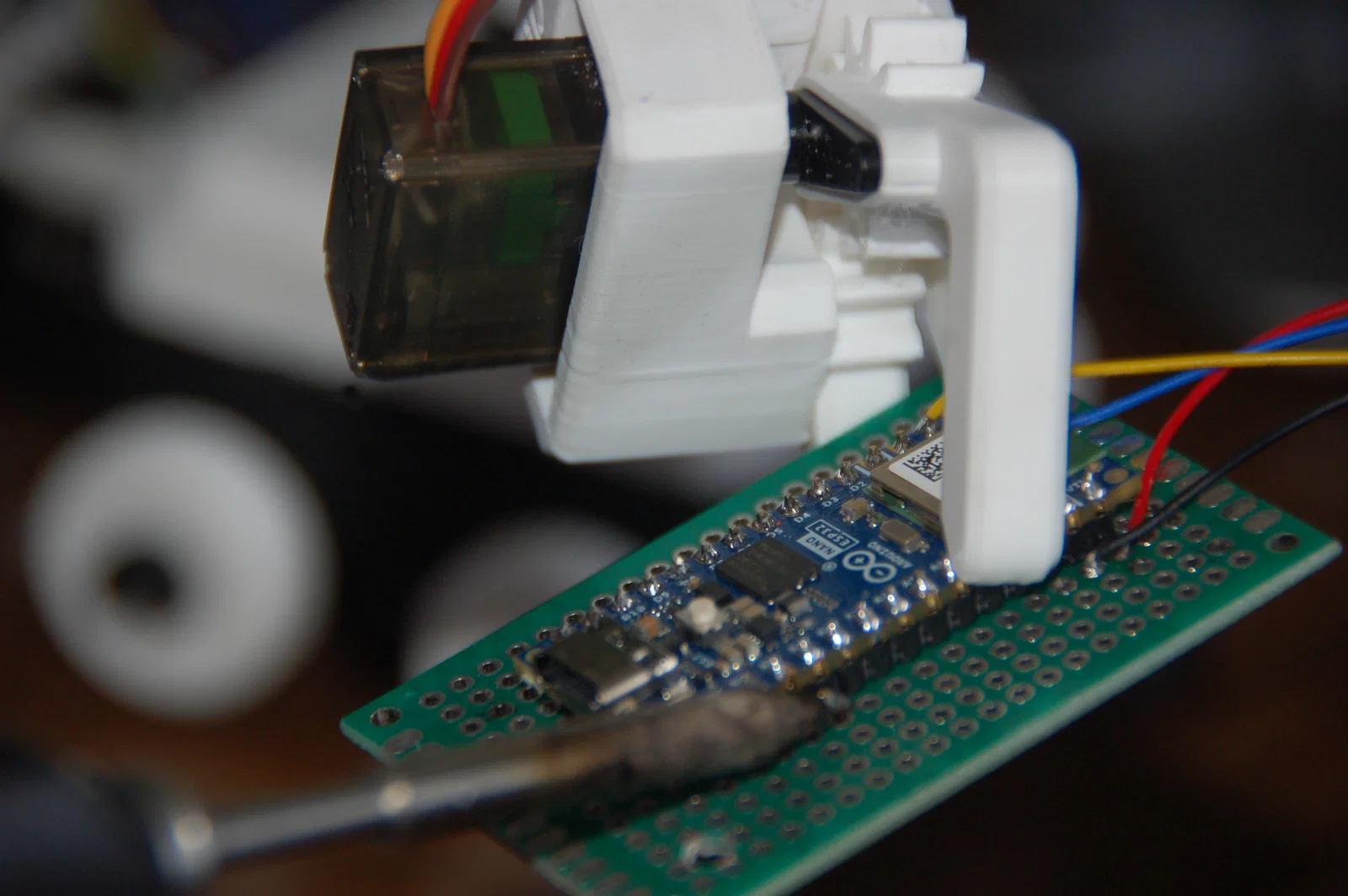
Đấu dây
- Việc đấu dây khá đơn giản, nối nguồn và mass cho 4 servo, cảm biến IR và vi điều khiển (hãy tra cứu chân cấp nguồn ngoài cho vi điều khiển của bạn, trên nano nó được đánh dấu là VIN). Sau đó, nối chân 2 với tín hiệu cảm biến, chân 3 với servo 1, chân 5 với servo 2, chân 6 với servo 3 và chân 9 với servo 4. KHÔNG cấp nguồn cho vi điều khiển qua cả chân nguồn và cổng USB cùng lúc, điều này sẽ làm cháy mạch (mình đã bị rồi). KHÔNG được cắm servo khi đang tải code hoặc khi mạch đang cắm điện. Điều này sẽ làm hỏng board của bạn (mình cũng đã bị rồi). Đây là sơ đồ đấu dây của mình. Mình làm hơi vội nên dây nhợ hơi rối (mình tin bạn sẽ làm đẹp hơn).


Mã nguồn (Code)
- Mình đã thiết lập: di chuyển ngang ứng với phím tiến/lùi nhanh, di chuyển vai ứng với tăng/giảm âm lượng, khuỷu tay ứng với phím 1 và 0.
- Mình viết code này (với sự trợ giúp của ChatGPT) để chạy với Arduino Nano Every và Uno R3, nhưng nó cũng sẽ hoạt động với nhiều dòng vi điều khiển khác.
- Nếu bạn chỉnh sửa code cho vi điều khiển khác, hãy chia sẻ nó để cộng đồng cùng sử dụng nhé.
- Code này "RẤT TỆ" vì mình chỉ là dân nghiệp dư, dù nó chạy được nhưng chưa tối ưu. File code nằm trong mục tải về. Nếu có cao nhân nào viết bản tốt hơn, hãy chia sẻ nhé. Cảm ơn!
Lắp ráp
Bước 1: Cắm điện để servo về vị trí trung tâm
- Việc này giúp bạn lắp cánh tay ở vị trí mặc định mà không sợ servo bị kẹt.
Bước 2: Loại bỏ support ở đế và cánh tay đầu tiên
- Đây là tất cả các bộ phận cần thiết, ngoại trừ dây điện và linh kiện điều khiển. Súng bắn keo chỉ dùng để cố định linh kiện điện tử chứ không gắn vào phần cơ khí.

Bước 3: Đặt 3 servo vào vị trí tương ứng
- Bánh răng đầu ra của servo phải hướng về trục mà nó điều khiển. Với servo 1, bánh răng phải hướng sang trái.

Bước 4: Lắp trục xoay chính
- Dùng chốt trục đứng và bẻ một chiếc kẹp C.
- Luồn chốt qua hai cánh tay đỡ cho thật khít.
- Nhấn đầu chốt vào lỗ ở đế.
- Lật ngược đế lại và cố định bằng kẹp C.

Bước 5: Lắp cánh tay thứ nhất
- Dùng cánh tay 1, chốt ngang, bánh răng và kẹp C.
- Đặt cánh tay vào giữa hai giá đỡ, chú ý đầu servo hướng về hốc vuông ở trục chính.
- Ấn chốt và bánh răng vào từ phía hốc vuông.
- Cố định bằng kẹp C.

Bước 6: Lắp cánh tay thứ hai
- Dùng cánh tay 2, chốt khuỷu tay, kẹp cuối cùng và vòng đệm in 3D.
- Chèn chốt khuỷu tay qua cánh tay 2 từ phía không có bánh răng.
- Đặt vòng đệm phẳng vào đầu chốt.

- Trượt bộ phận này qua cánh tay 1 từ phía đầu ra servo.
- Cố định bằng kẹp C.

Bước 7: Gắn bánh răng
- Dùng 3 bánh răng và gắn vào trục servo.
- Bánh răng không số dùng cho servo 1 (xoay ngang), số 1 cho servo 2 (tay 1), số 2 cho servo 3 (tay 2).
- Nếu không thấy số: bánh răng răng lớn nhất cho servo 3, răng trung bình cho servo 1, răng nhỏ cho servo 2.
- LƯU Ý: Với servo 1, xoay đầu trục về phía sau, cánh tay về phía trước. Với servo 2, xoay đầu trục tối đa theo chiều kim đồng hồ khi tay đang hạ thấp. Với servo 3, xoay đầu trục xuống dưới.


Bước 8: Lắp rơ-moóc
- Gắn bánh xe và chốt nối vào rơ-moóc bằng 2 ốc vít nhỏ.

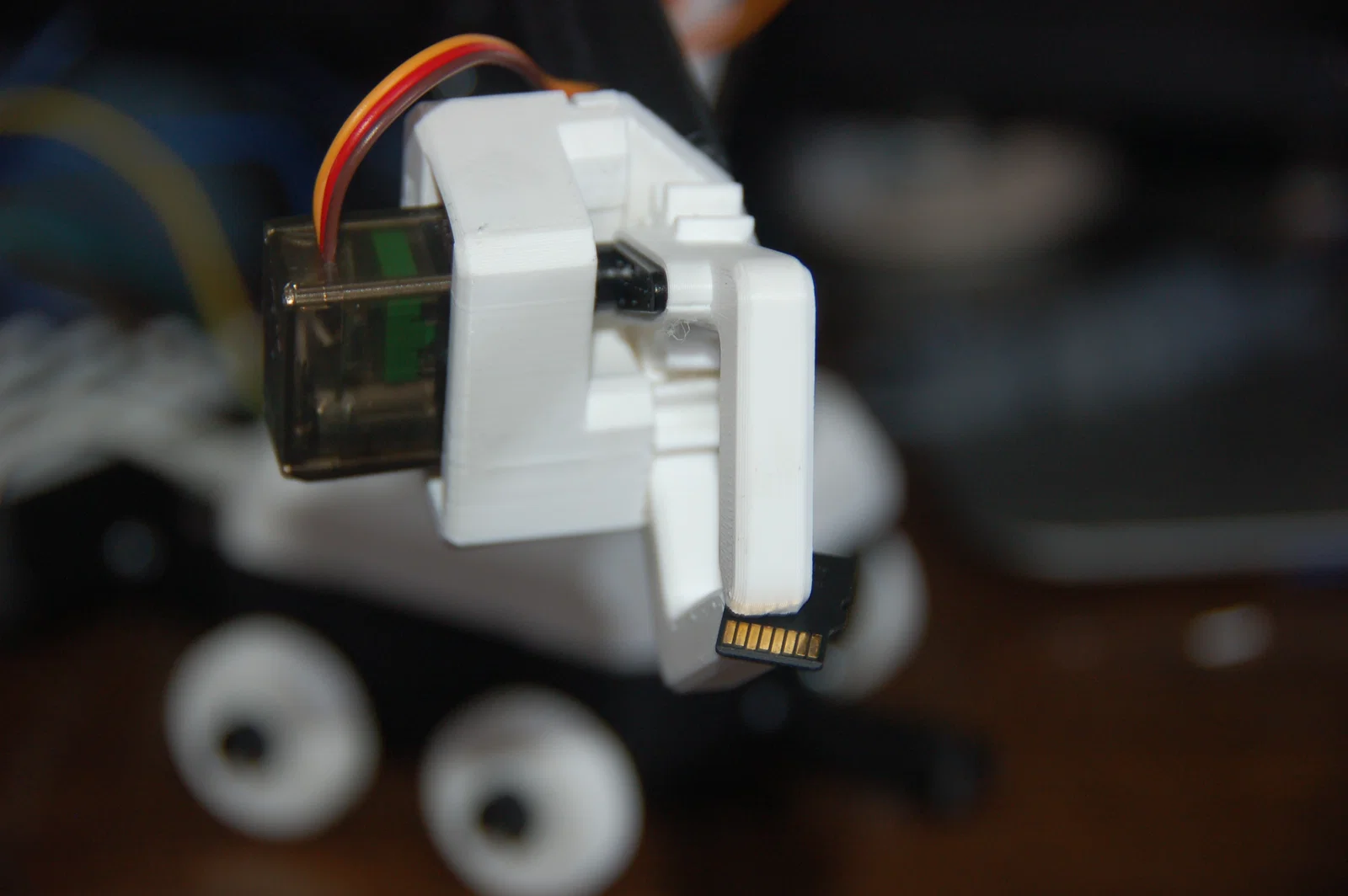
Bước 9: Lắp kẹp (Gripper)
- Lắp các ngón kẹp vào tấm đế.
- Đặt servo vào giá đỡ và gắn bánh răng.
- Gắn giá đỡ servo lên tấm đế bằng ốc m3x10 từ phía dưới.
- Luồn dây qua rãnh ở cánh tay 2 rồi xuống cánh tay 1.
Bước 10: Hoàn thiện
- Luồn dây qua lỗ chữ nhật và cắm vào bộ dây nối.
- Dán cảm biến IR và jack nguồn 6mm vào vị trí.
- Cố định vi điều khiển, đấu nối dây thừa.
- Đậy nắp lại và XONG!!!
Ghi chú:
- Bạn có thể in thêm một rơ-moóc để đựng bộ pin AA cho nguồn điện không dây.
- Trong file có tấm đế với các lỗ m3 cách nhau 10mm để bạn dễ tùy biến.
- Rất mong nhận được bản Remix từ các bạn.
- Hy vọng thấy được các bản nâng cấp code, ví dụ như dùng Esp32 với Bluetooth.
- Cảm ơn bạn đã in mô hình này!

Giấy phép

File mô hình
Đang tải files, vui lòng chờ...

























Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!