Bộ kẹp Arm Gripper cho Servo MG996R dùng vòng bi 6203RS

Bạn đang tìm kiếm một thiết kế đầu kẹp robot chất lượng cho dự án của mình? Mẫu Arm Gripper MG996R v1 này chính là sự lựa chọn lý tưởng, được tối ưu hóa để hoạt động cùng servo MG996R mạnh mẽ và vòng bi 6203RS bền bỉ. Thiết kế này cung cấp khả năng cầm nắm chính xác, giúp cánh tay robot của bạn linh hoạt hơn trong các tác vụ tự động hóa. Với hướng dẫn chi tiết về cách in 3D, lựa chọn vật liệu như PLA hay PETG và các lưu ý về lắp ráp, đây là mô hình hoàn hảo để nâng cấp dự án DIY của bạn. Hãy tải xuống file STL ngay hôm nay để bắt đầu hành trình sáng tạo cánh tay robot đầy thú vị và hiệu quả.
Mô tả
Đầu kẹp Robot cánh tay (Arm Gripper) sử dụng Servo MG996R
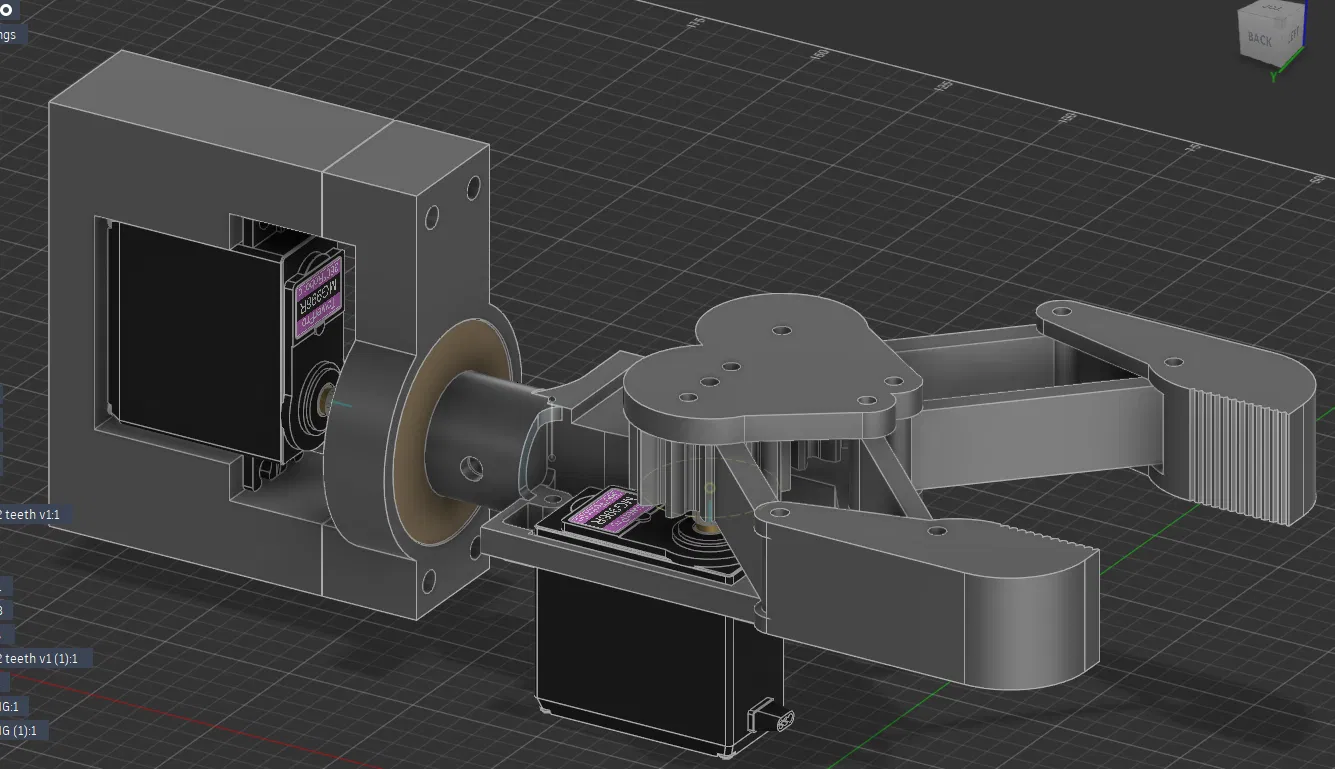
Đây là mẫu thiết kế bộ phận kẹp (gripper) cực kỳ hữu ích cho những bạn đang đam mê chế tạo cánh tay robot tự động. Thiết kế này được tối ưu hóa để tương thích hoàn hảo với dòng servo phổ biến MG996R, mang lại lực kẹp mạnh mẽ và sự ổn định cao trong quá trình vận hành. Điểm đặc biệt của mô hình này là sự kết hợp với vòng bi 6203RS, giúp các khớp chuyển động mượt mà, giảm ma sát và tăng tuổi thọ cho các bộ phận nhựa in 3D.
Sản phẩm này cực kỳ phù hợp cho các dự án học tập, nghiên cứu về cơ khí hoặc tự động hóa tại nhà. Với cấu trúc vững chắc, nó cho phép cánh tay robot của bạn có thể cầm nắm, di chuyển các vật thể nhỏ một cách chính xác. Các kỹ sư hoặc người có sở thích DIY (tự tay làm lấy) chắc chắn sẽ đánh giá cao cách bố trí các bộ phận, từ vị trí đặt servo cho đến hệ thống truyền động bánh răng, tất cả đều được tính toán để dễ dàng lắp ráp và bảo trì.
Một số lưu ý quan trọng khi bạn bắt đầu in và lắp đặt bộ kẹp này:
- Tương thích phần cứng: Đảm bảo bạn đã chuẩn bị sẵn servo MG996R và vòng bi 6203RS trước khi bắt đầu lắp ráp để đảm bảo kích thước vừa vặn nhất.
- Cài đặt in 3D: Để đạt được độ bền tối đa cho các khớp kẹp, bạn nên sử dụng vật liệu PLA hoặc PETG với mật độ in (infill) khoảng 40-50% và ít nhất 3-4 lớp vỏ (perimeters).
- Độ chính xác: Vì đây là chi tiết cơ khí đòi hỏi độ khít cao, hãy cân chỉnh máy in (calibrate) kỹ lưỡng để tránh hiện tượng sai số kích thước làm cản trở quá trình lắp ráp vòng bi.
- Bôi trơn: Hãy sử dụng một chút mỡ bò chuyên dụng cho các bánh răng để giảm tiếng ồn và giúp chuyển động của cánh tay linh hoạt hơn khi vận hành.
- Cấu trúc khớp: Các ngàm kẹp được thiết kế với bề mặt ma sát tốt, giúp tăng khả năng cầm giữ vật thể, hạn chế trượt khi robot thực hiện thao tác gắp.
Việc sở hữu một mô hình gripper tự thiết kế và in tại nhà không chỉ giúp tiết kiệm chi phí mà còn là cách tuyệt vời để hiểu sâu về cơ chế cánh tay robot. Hy vọng mẫu thiết kế Arm Gripper này sẽ là nền tảng vững chắc cho dự án robot tiếp theo của bạn.
Giấy phép

File mô hình








Chưa có bản in nào được khoe. Hãy là người đầu tiên!
Chưa có bình luận nào. Hãy là người đầu tiên!