Khung đế Robot leo tường chuyên dụng cho động cơ BLDC 6042

Khám phá mẫu khung đế robot leo tường (Wall Climbing Robot Base) chuyên dụng dành cho những bạn đam mê chế tạo robot RC. Thiết kế này được tối ưu hóa để lắp đặt các loại động cơ không chổi than (BLDC) kết hợp với cánh quạt 6042, giúp tạo lực hút cần thiết để robot bám chặt trên bề mặt thẳng đứng. Với cấu trúc vững chắc và thông minh, đây là lựa chọn hoàn hảo giúp việc chế tạo trở nên dễ dàng và hiệu quả hơn. Sản phẩm hỗ trợ tốt cho các dự án kỹ thuật, đảm bảo độ bền và sự ổn định cao khi vận hành. Hãy in bằng chất liệu bền bỉ như PETG để đạt được kết quả sử dụng tốt nhất cho mô hình robot leo tường của bạn.
Mô tả
Khung Đế Robot Leo Tường Cho Động Cơ BLDC
Bạn đang bắt tay vào chế tạo một con robot có khả năng leo tường độc đáo? Mẫu khung đế robot leo tường (Wall Climbing Robot Base) này chính là mảnh ghép quan trọng giúp bạn hiện thực hóa ý tưởng của mình. Thiết kế này được tối ưu hóa đặc biệt để lắp đặt các loại động cơ không chổi than (BLDC) kết hợp cùng cánh quạt 6042, tạo ra lực hút hoặc lực đẩy cần thiết để robot bám chắc trên các bề mặt thẳng đứng. Đây là giải pháp lý tưởng cho các bạn đam mê kỹ thuật RC và robot tự chế muốn thử nghiệm cơ chế vận hành mới lạ.
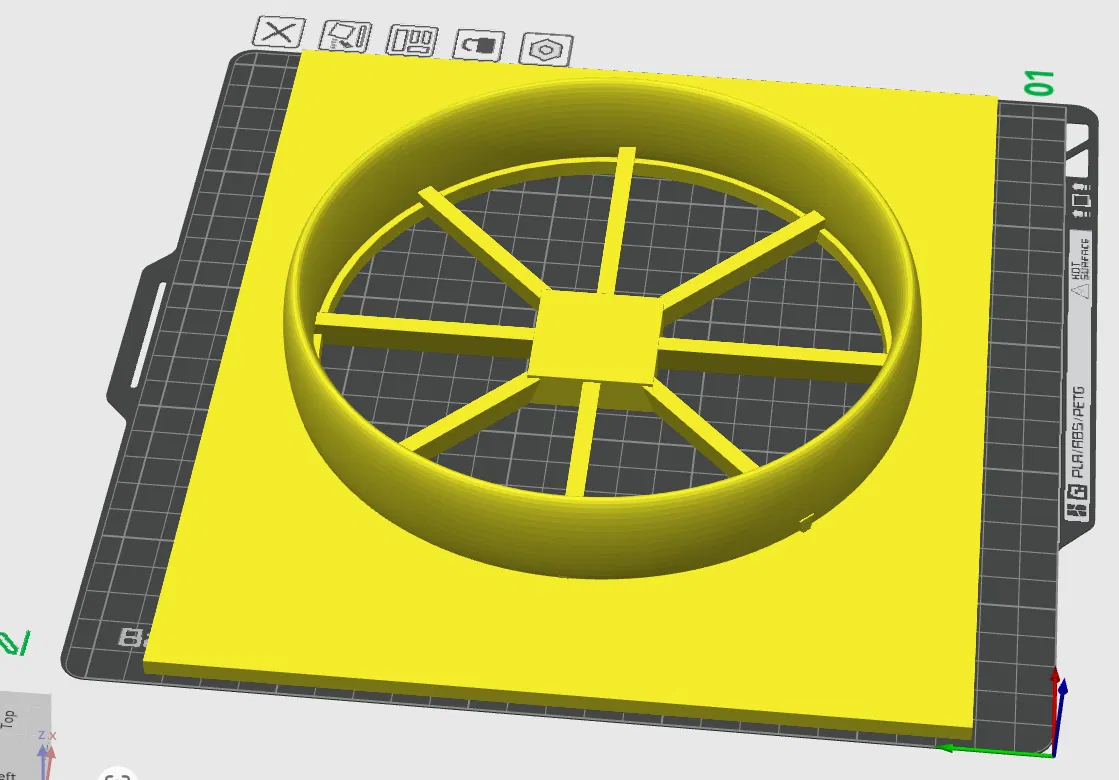
Kết cấu của bộ khung này rất gọn gàng và khoa học, tập trung vào sự cân bằng và độ bền khi robot hoạt động ở tốc độ cao. Phần trung tâm được thiết kế chắc chắn để giữ chặt trục động cơ, trong khi vòng bao bên ngoài giúp bảo vệ cánh quạt và định hình luồng khí. Bạn chỉ cần in bộ phận này, lắp động cơ vào và kết hợp với hệ thống điều khiển của mình là đã có ngay một nền tảng vững chắc để khám phá công nghệ robot leo tường thú vị. Sản phẩm này sẽ giúp bạn tiết kiệm rất nhiều thời gian thiết kế cơ khí ngay từ đầu.
Những lưu ý quan trọng để có bản in hoàn hảo:
- Vật liệu đề xuất: Nên dùng PETG hoặc ABS để đảm bảo độ cứng cáp và khả năng chịu nhiệt tốt, vì động cơ BLDC khi chạy lâu sẽ phát nhiệt đáng kể.
- Độ bền cơ học: Hãy cài đặt chế độ in với infill từ 30-40% dạng lưới (grid) hoặc gyroid để bộ khung chịu được rung động mạnh.
- Layer height: Bạn có thể chọn mức 0.2mm để cân bằng tốt nhất giữa thời gian in và độ chi tiết, bề mặt sản phẩm sẽ đủ mịn để lắp ráp.
- Hỗ trợ (Supports): Do có phần vòng bao và nan hoa, bạn nên sử dụng support để đảm bảo các phần nhô ra được in chính xác nhất.
- Kiểm tra sự cân bằng: Sau khi in xong, hãy làm sạch kỹ các phần support thừa, đảm bảo khung không bị vênh để tránh gây mất cân bằng khi cánh quạt quay ở vòng tua cao.
- Tương thích: Mẫu này được thiết kế riêng cho loại cánh quạt 6042, hãy đảm bảo bạn sử dụng đúng loại để đạt hiệu suất tối ưu.
Hy vọng mẫu thiết kế này sẽ hỗ trợ đắc lực cho dự án robot của bạn. Chúc bạn có những trải nghiệm chế tạo thành công và thú vị!
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!