Robot Otto Dạng Chó - Có Điều Khiển PID và Biểu Cảm Khuôn Mặt

Dự án robot bốn chân lấy cảm hứng từ Otto DIY, được thiết kế lại như một chú cún đáng yêu. Tích hợp điều khiển PID cho chuyển động mượt mà và màn hình hiển thị biểu cảm sinh động.






Mô tả
🐶 Robot Otto Dạng Chó – Bản Remix Otto Bốn Chân
Robot Otto Dạng Chó (DogLike Otto Robot) là một dự án thú vị và mang tính giáo dục cao, được lấy cảm hứng từ nguyên mẫu Otto DIY Robot, nhưng được thiết kế lại để mang phong cách như một chú cún cưng bằng robot.
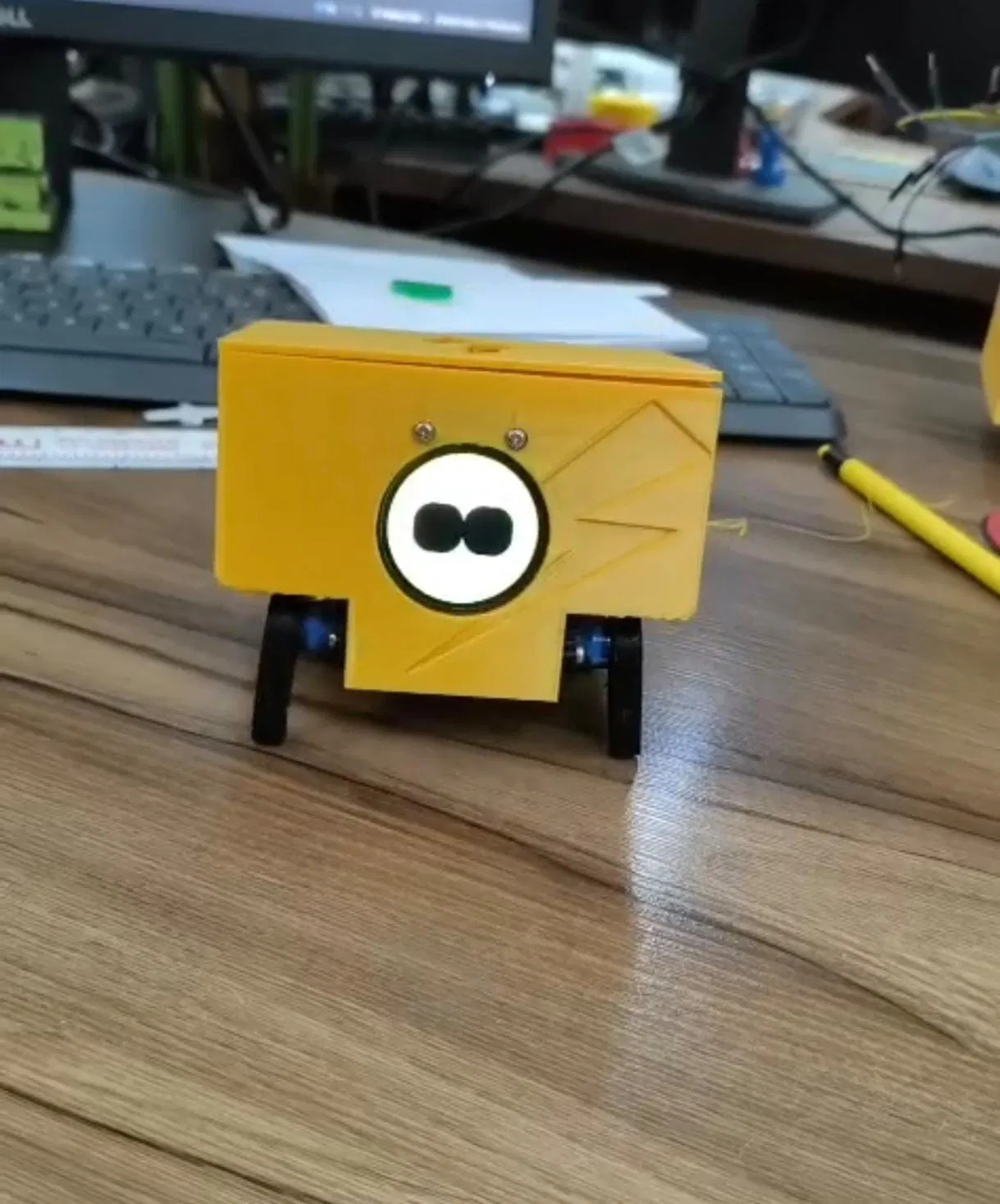
Bản remix này biến chiếc Otto cổ điển thành robot bốn chân có tính cách giống chó, có khả năng thực hiện các chuyển động linh hoạt và tương tác cảm xúc thông qua một màn hình tròn.
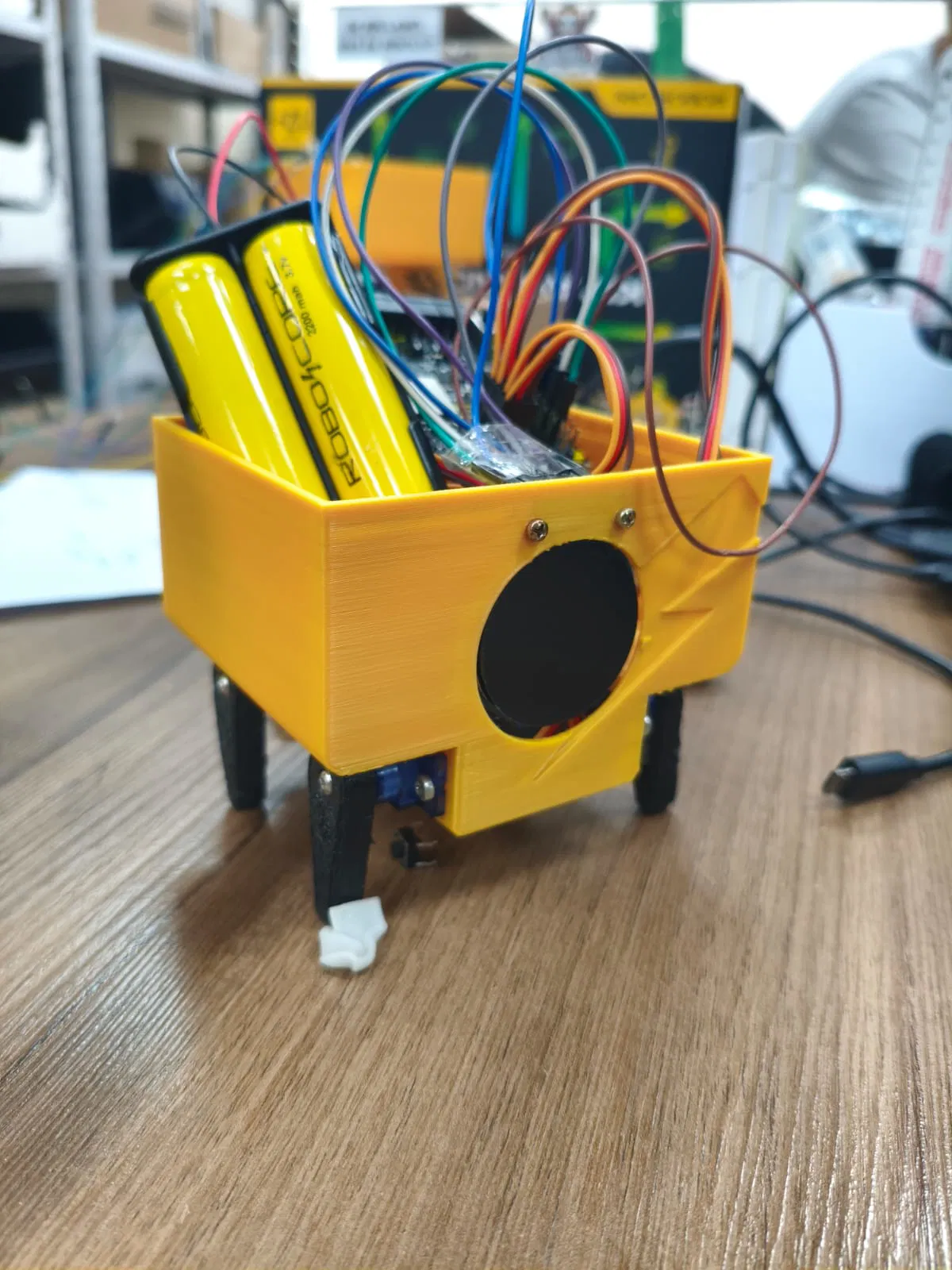
Robot được vận hành bởi bo mạch RoboCore Vespa và sử dụng hai pin Li-ion 3.7V (18650) mắc nối tiếp để cung cấp năng lượng ổn định cho các linh kiện điện tử và động cơ servo.
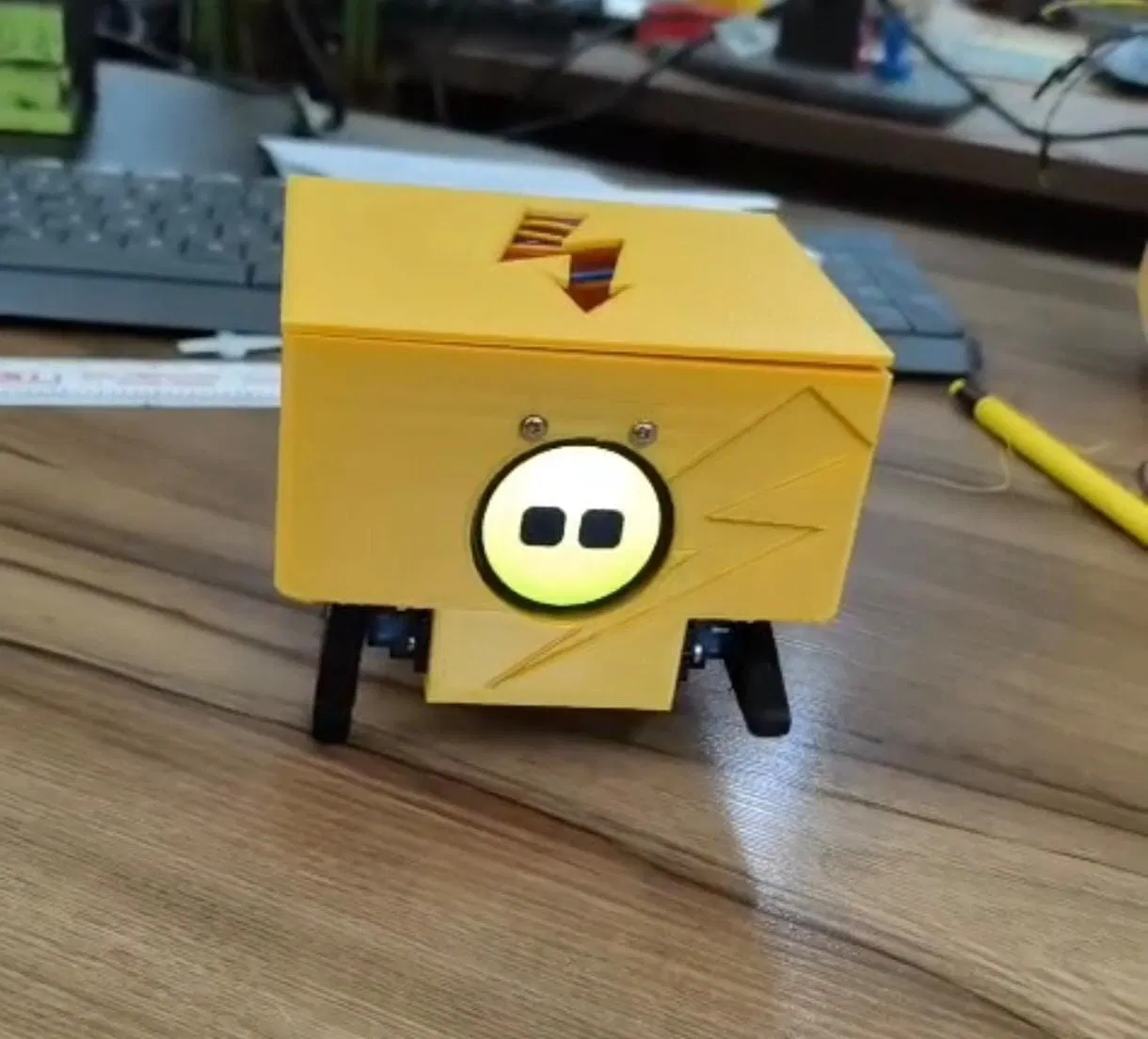
Để tăng cường khả năng tương tác, một màn hình tròn GC9A01 đóng vai trò là “gương mặt” của robot, hiển thị mắt chớp và các biểu cảm cảm xúc trong khi robot di chuyển.
Dự án kết hợp giữa động cơ servo điều khiển PID, các bước đi, hình ảnh động biểu cảm và hành vi tương tác, tạo ra một nền tảng hấp dẫn để học hỏi về robot, thử nghiệm hệ thống nhúng và trình diễn giáo dục.
Tất cả mã nguồn, firmware và tài liệu đều có sẵn tại đây: https://github.com/ThayAlms/DogLike-Otto-Robot
🏆 Phần: Chất lượng thiết kế
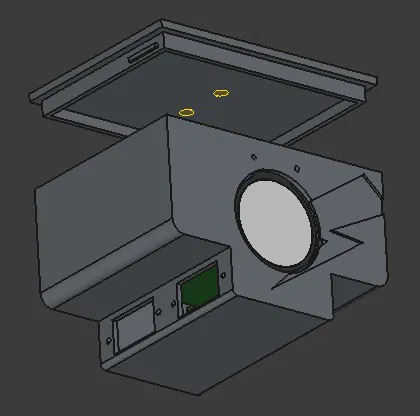
Robot Otto Dạng Chó được thiết kế chú trọng vào sự cân bằng cơ học, khả năng di chuyển mượt mà và dễ dàng lắp ráp.
Cấu trúc bốn chân giúp phân bổ trọng lượng đồng đều, cải thiện độ ổn định so với cấu hình hai chân của Otto DIY Robot truyền thống.
Mỗi bộ phận cấu trúc được mô hình hóa để đảm bảo:
- căn chỉnh servo chính xác
- kết nối cơ khí cứng cáp
- trọng tâm cân bằng
Kết quả là các bước đi ổn định, giảm tải áp lực lên servo và hiệu suất đáng tin cậy trong các chuỗi chuyển động.
🖨 Khả năng in ấn
Tất cả các bộ phận được thiết kế đặc biệt để dễ dàng in 3D FDM.
Các cân nhắc trong thiết kế bao gồm:
- bề mặt phẳng tối ưu giúp bám bàn in tốt
- hạn chế tối đa việc sử dụng support
- thiết kế vị trí lắp servo gọn gàng
- hướng in dễ dàng
Bất cứ khi nào có thể, mô hình được chia thành các thành phần riêng biệt, cho phép người dùng in từng bộ phận và giảm bớt sự phức tạp khi in.
Cài đặt khuyến nghị:
- Độ cao lớp in (Layer height): 0.2 mm
- Độ đặc (Infill): 15–20%
- Support: hầu hết các bộ phận không cần
- Chất liệu: PLA hoặc PETG
Những lựa chọn này đảm bảo mô hình có thể được in ngay cả trên những máy in cơ bản nhất.
🐾 Tính năng
🚶 Đi bộ bốn chân mượt mà
Robot di chuyển về phía trước bằng các bước chân phối hợp với điều khiển servo hỗ trợ PID, mang lại chuyển động mượt mà và ổn định hơn so với điều khiển vị trí đơn thuần.
🪑 Hành vi ngồi
Tư thế ngồi ổn định, nơi chân sau hỗ trợ cơ thể trong khi chân trước vẫn giữ thăng bằng.
✋ Tương tác bắt tay
Robot nâng chân trước bên phải để mô phỏng cử chỉ “bắt tay” thân thiện trước khi trở lại vị trí trung tính.
🛏 Chế độ nằm
Chuyển động thả lỏng dần dần để hạ thấp robot vào tư thế nghỉ ngơi.
😀 Hiển thị cảm xúc
Màn hình TFT GC9A01 tròn hiển thị mắt hoạt hình và các biểu cảm, cho phép robot truyền đạt các cảm xúc đơn giản như vui vẻ hoặc phản ứng chớp mắt.
⚙ Chân điều khiển PID
Mỗi động cơ servo được ổn định bằng bộ điều khiển PID đơn giản, giúp cải thiện chất lượng chuyển động và giảm căng thẳng cơ học.
Thông số bộ điều khiển:
- Kp (Hệ số tỉ lệ) – đưa servo về góc mong muốn
- Kd (Hệ số vi phân) – giảm rung lắc và ngăn chặn tình trạng quá đà
Cách tiếp cận này mang lại:
-
các chu kỳ đi bộ mượt mà hơn
-
giảm thiểu các chuyển động giật cục
-
chuyển động robot tự nhiên hơn
-
-
🛠 Lắp ráp
🔩 Servo
Gắn từng động cơ servo vào cấu trúc in bằng các ốc vít đi kèm trong bộ kit servo.
🐾 Chân
Cố định bàn chân vào trục servo bằng ốc vít hoặc khớp nối để tăng độ bám đất.
📺 Màn hình
Gắn màn hình GC9A01 bằng ốc và tán M2 vào giá đỡ in 3D chuyên dụng.
🔋 Pin
Cấp nguồn cho robot bằng hai pin Li-ion 18650 mắc nối tiếp (~7.4V). Bo mạch Vespa sẽ điều chỉnh điện áp cần thiết cho cả linh kiện điện tử điều khiển và màn hình.
🎓 Giá trị giáo dục
Robot Otto Dạng Chó không chỉ được thiết kế như một chú robot vui nhộn mà còn là nền tảng học tập về robot và hệ thống nhúng, bao gồm các chủ đề như:
- điều khiển động cơ servo
- thuật toán PID
- di chuyển bốn chân
- giao diện robot biểu cảm
- lập trình nhúng
Đây là lựa chọn lý tưởng cho học sinh, người chơi hệ maker và những người đam mê robot muốn khám phá các nguyên lý cơ bản của robot tương tác.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!