Cánh tay robot có thể tùy chỉnh - File SolidWorks và STEP

Cánh tay robot in 3D thiết kế dạng mô-đun, dễ lắp ráp và học hỏi về lập trình Arduino. Sản phẩm đi kèm file nguồn SolidWorks và STEP cho phép bạn tự do chỉnh sửa theo ý thích.




Mô tả
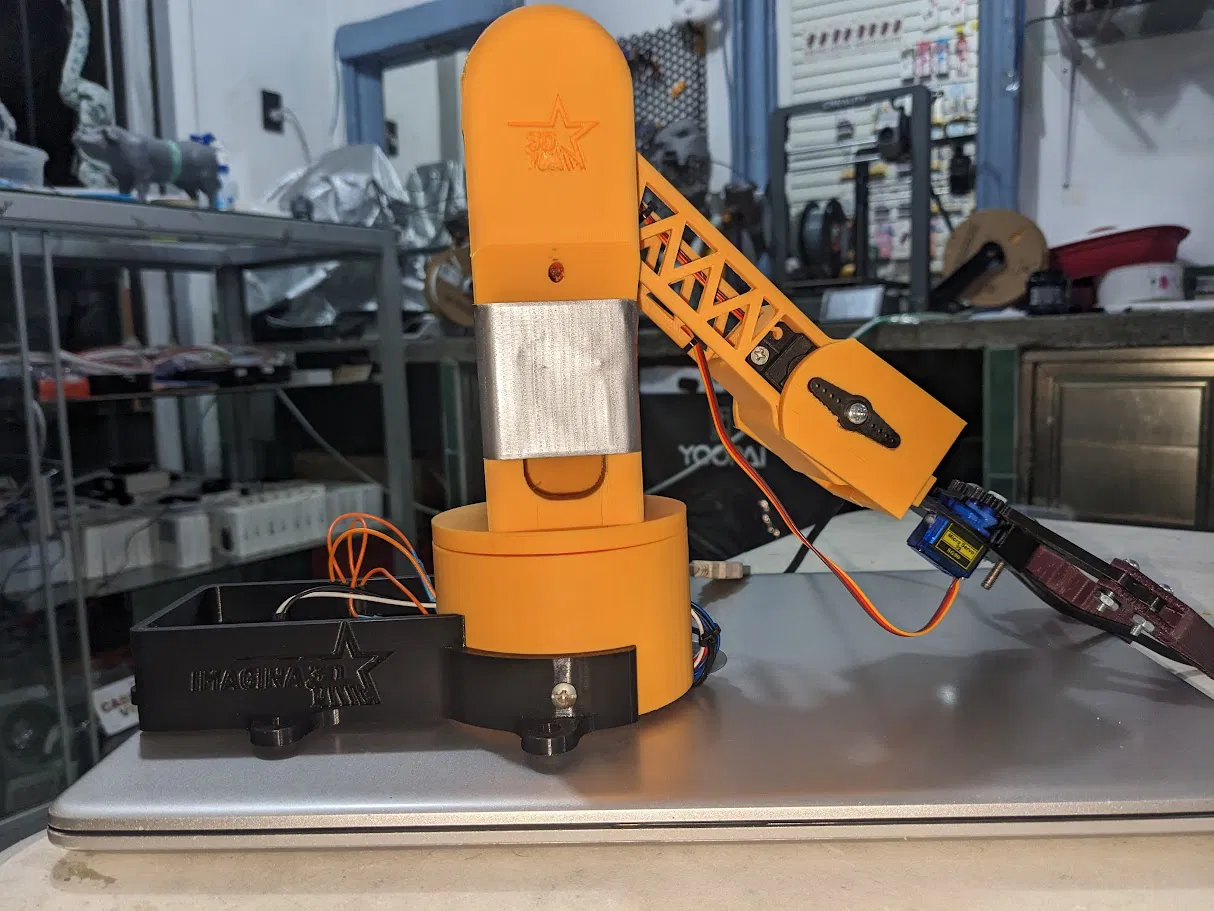
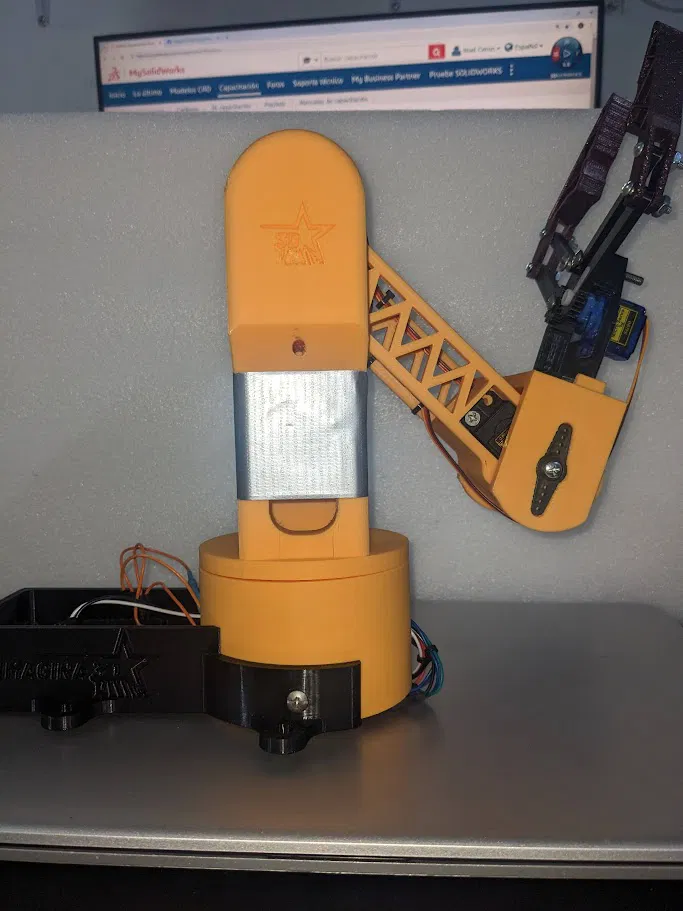
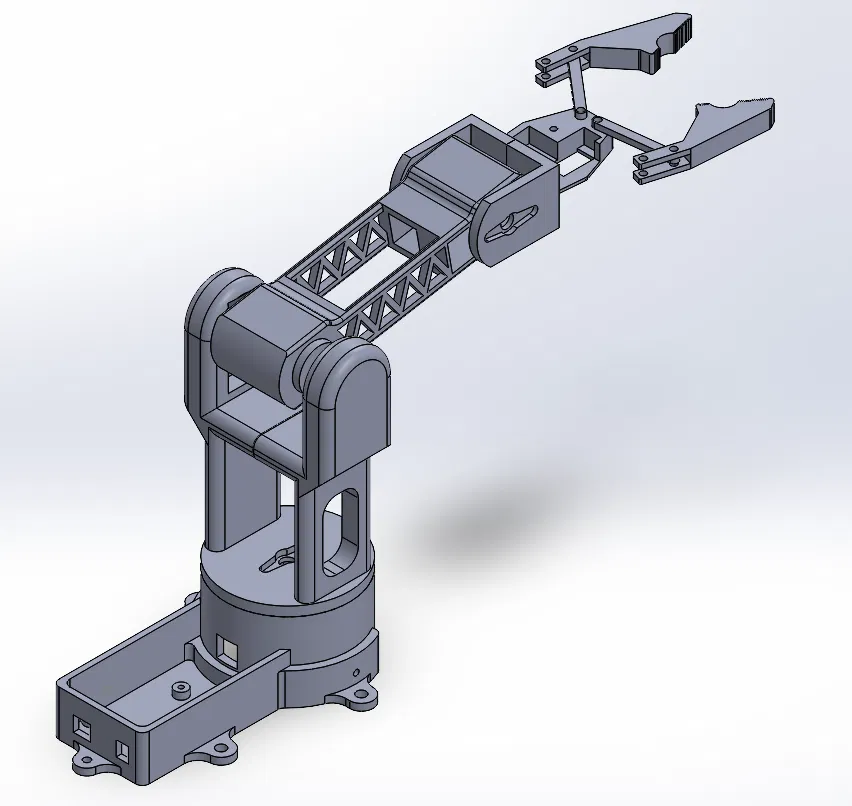
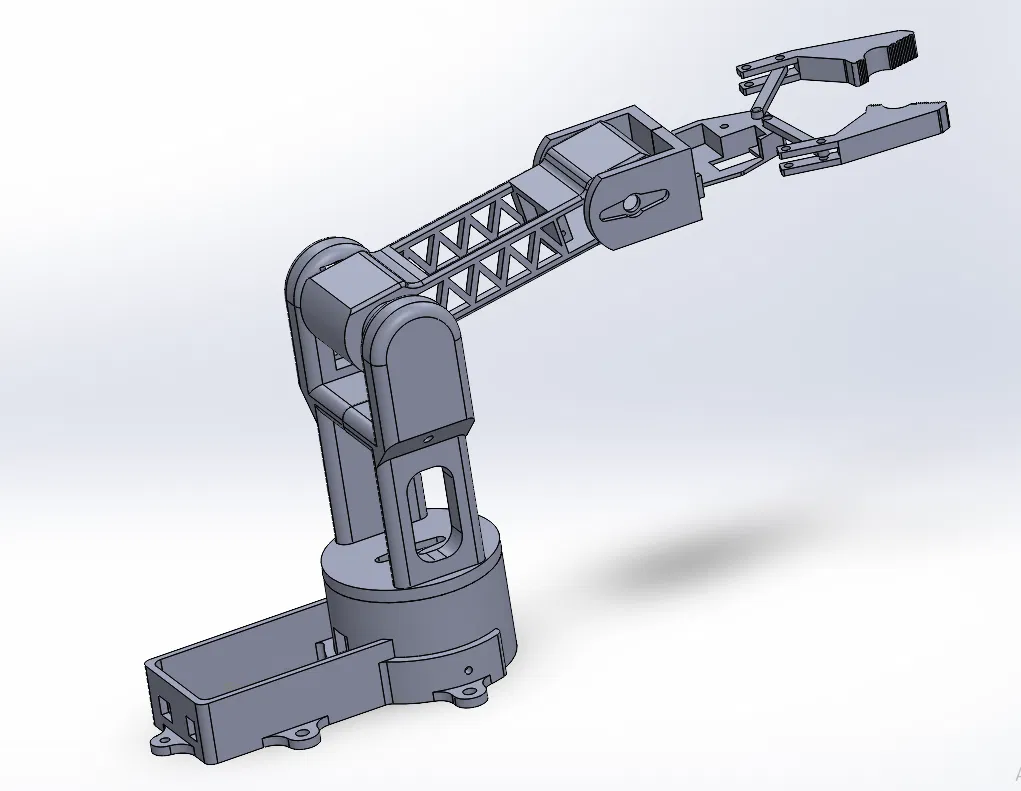
🦾 Cánh tay robot in 3D – Mô hình tùy biến linh hoạt
Cánh tay robot này được thiết kế để đảm bảo tính ứng dụng, phục vụ mục đích giáo dục và dễ dàng in ấn. Đây là lựa chọn lý tưởng cho các bạn sinh viên, makers và những người yêu thích robot đang tìm kiếm một dự án thực tế với các linh kiện dễ tìm.
🔩 Thiết kế dạng mô-đun và linh hoạt, với các chuyển động được điều khiển bằng động cơ servo. Hệ thống xoay tích hợp vòng bi giúp cải thiện độ ổn định và giúp cánh tay vận hành mượt mà, chính xác hơn.
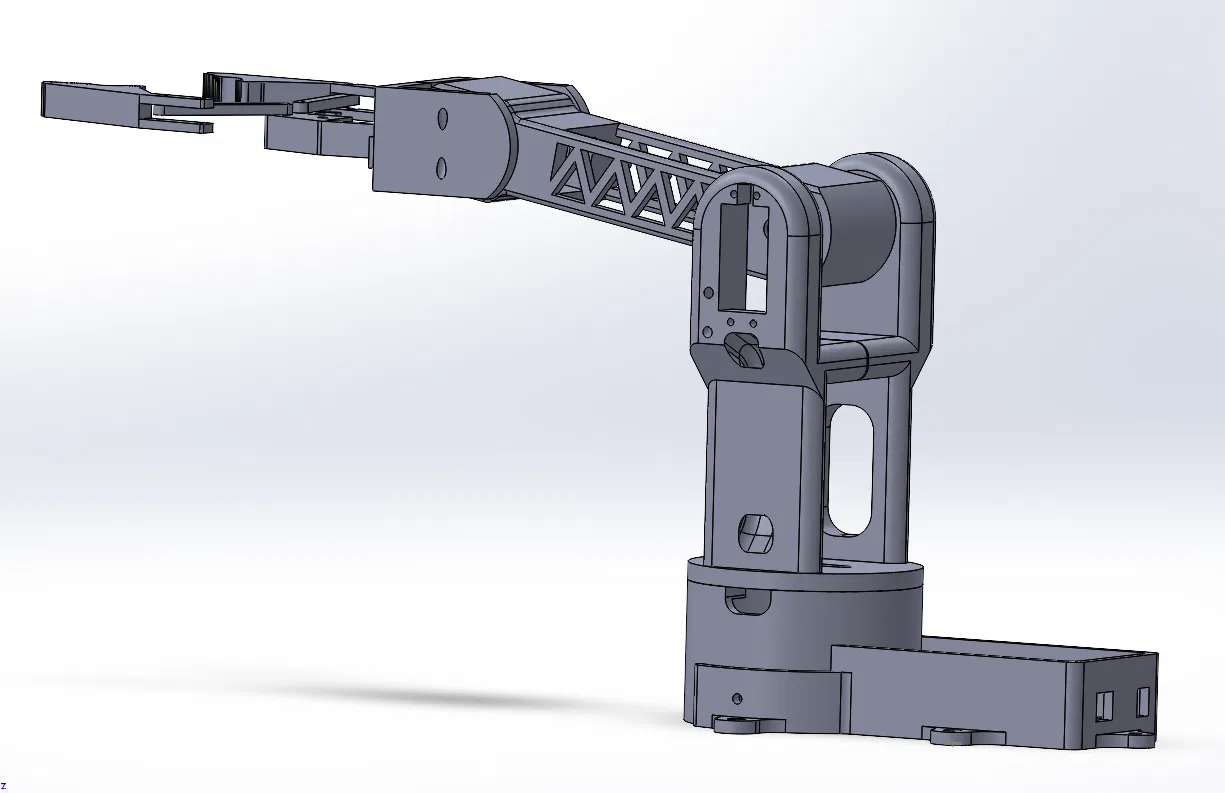
💻 Mô hình bao gồm:
File STL sẵn sàng để in
File nguồn SolidWorks (.SLDPRT và .SLDASM) để bạn có thể chỉnh sửa kích thước, hình dạng hoặc tích hợp thêm các tính năng mới
🧰 Yêu cầu linh kiện:
3 × Động cơ Servo MG995 TowerPro (15kg, 180°)
1 × Động cơ Micro Servo SG90
1 × Vòng bi 5x16x5 mm
1 × Arduino UNO
Bộ ốc vít lục giác (Allen)
Dây cắm jumper
📐 Lời khuyên: nên in với mật độ lấp đầy (infill) tối thiểu 20% và đảm bảo độ bám dính tốt trên bàn in. Một số chi tiết có thể cần dùng đến support.
🔧 Dễ dàng lắp ráp, thiết kế hướng tới những ai muốn học hỏi về động học, điện tử cơ bản và lập trình điều khiển bằng Arduino.
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!