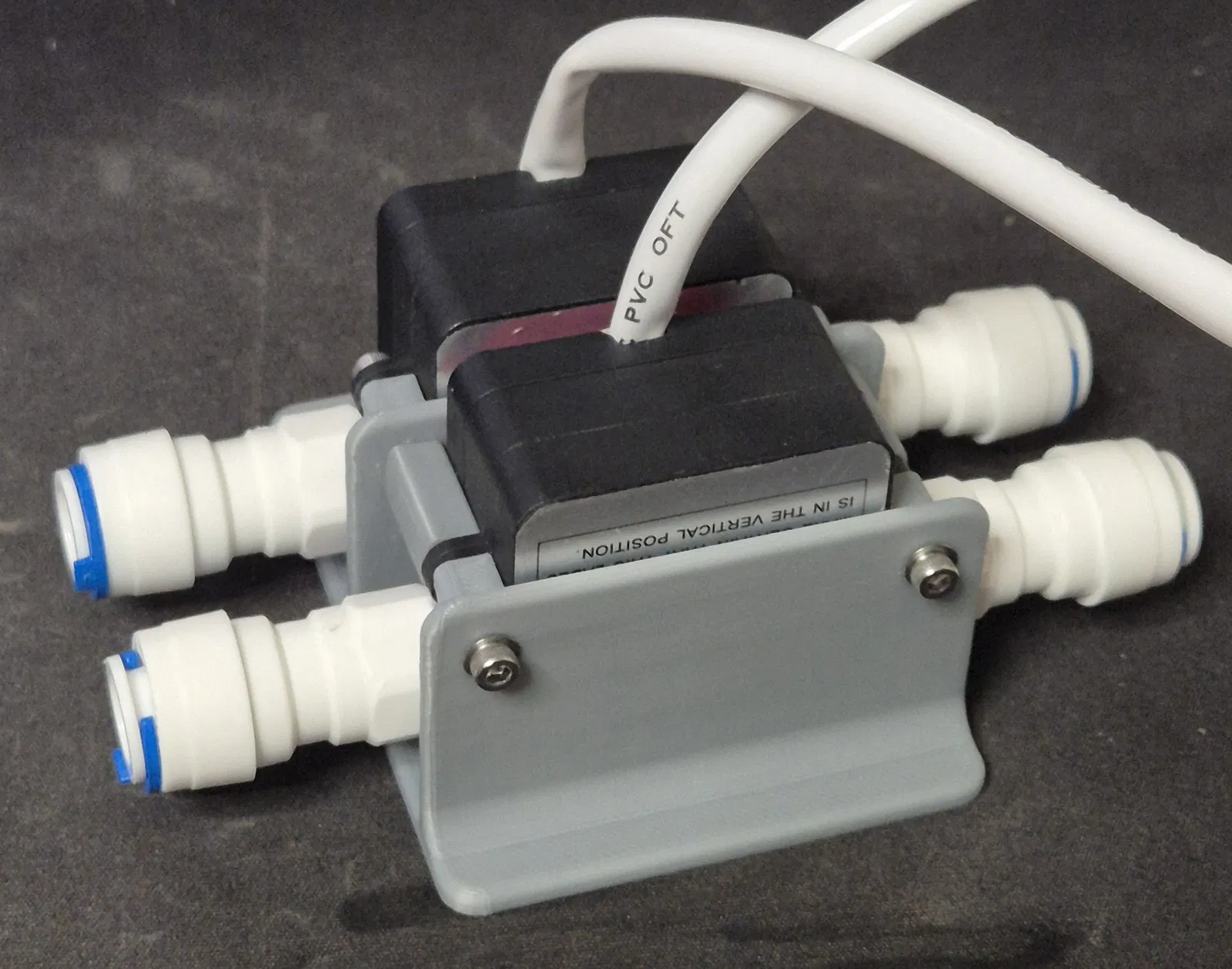
Chân đế gắn cảm biến lưu lượng kép (dùng cho bộ làm mát Lindr và Robopípa)

Chân đế thiết kế chuyên dụng cho cảm biến lưu lượng OF07ZAT kép với khoảng cách 33mm. Giải pháp lắp đặt gọn gàng, linh hoạt, hỗ trợ tháo lắp nhanh cho hệ thống Robopípa và Lindr cooler mà không làm ảnh hưởng đến đường ống.
51
Lượt Xem
0
Lượt Thích
0
Lượt Tải
Cập Nhật Mar 11, 2026





Mô tả
Chân đế để bàn dùng cho 1 hoặc 2 cảm biến lưu lượng flowmon với khoảng cách ống là 33mm. Sản phẩm cực kỳ lý tưởng khi kết hợp với "Robopípa".
BOM (Danh sách linh kiện):
- 1x Stojanek
- 2x Distance_velka (hoặc có thể tận dụng các trụ lục giác spacer từ case máy tính)
- 4x heat-insert M3 OD5 L4 (không cần nếu bạn dùng trụ lục giác spacer từ case máy tính)
- 2x Distance_mala
- 4x ốc M3x20 (có hoặc không có long đền đều được)
Hướng dẫn lắp ráp:
- Gắn 2 heat insert vào mỗi chi tiết "Distance_velka".
- Trượt cảm biến vào, vặn chặt ốc vào các giá đỡ phía bên phải (1 ốc từ phía trước, 1 ốc từ phía sau).
- Lắp chi tiết "Distance_velka" vào giữa cảm biến phía sau và "vách" phía trước.
- Siết chặt cả 2 ốc bên phải.
- Làm tương tự với bên trái, nhưng cần lắp thêm chi tiết "Distance_mala" vào giữa vách chân đế và giá đỡ cảm biến.
Phía bên trái sử dụng các miếng đệm có thể tháo rời giúp bạn dễ dàng trượt cảm biến ra ngoài mà không cần bẻ cong các ống đang nối với bộ làm mát (chỉ cần trượt nó sang trái là xong).
Thông số in:
- Đặt hướng in như trong file STL, không cần support, infill 15%, thiết lập 3 đường biên (perimeters).
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
Đang tải files, vui lòng chờ...



Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!