ARA - Another Robot Arm! (Cánh tay robot điều khiển Arduino + WinForms)

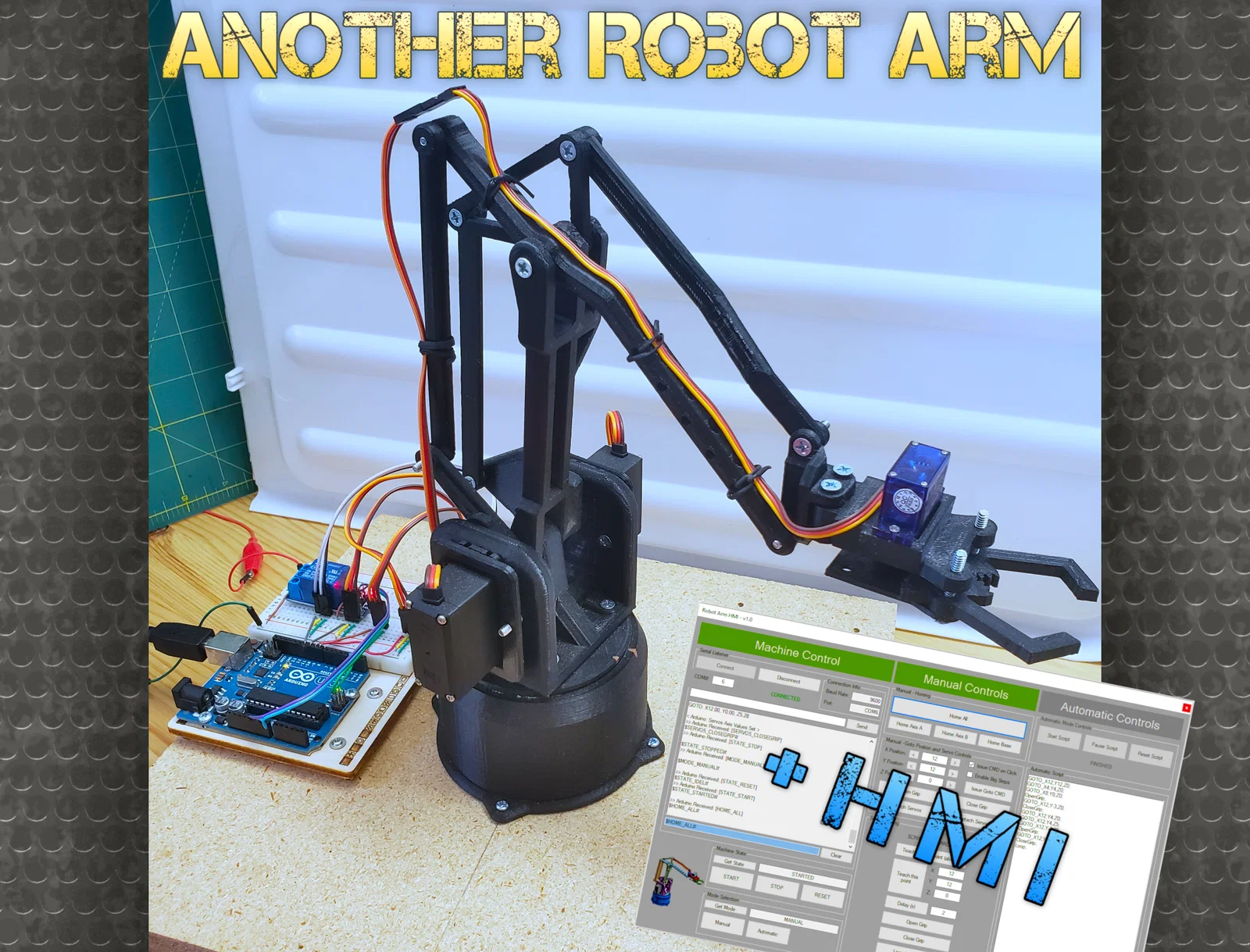
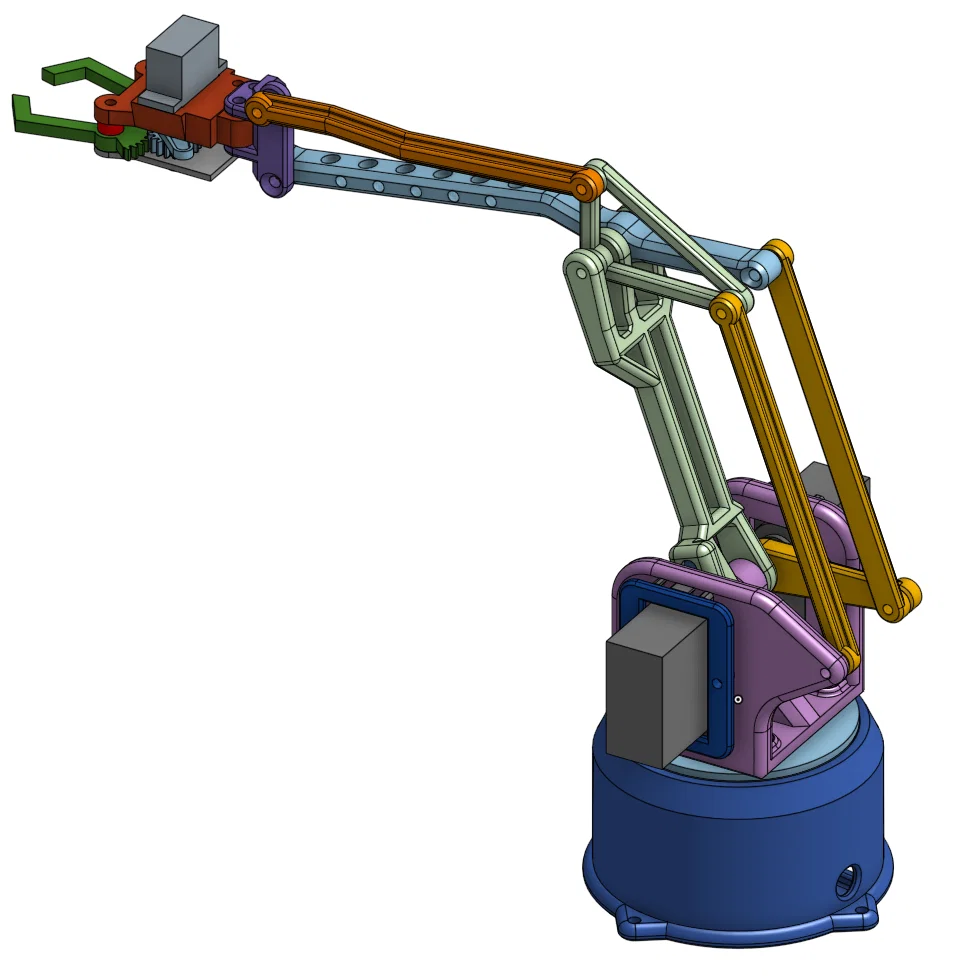
ARA - Another Robot Arm!: cánh tay robot tự thiết kế trong OnShape, chạy Arduino và có HMI WinForms trên Windows. Hỗ trợ điều khiển manual/automatic, “teach” vị trí và chạy lại script loop. Có code và file .exe trên GitHub.












































Mô tả
Mình tự đặt cho bản thân một thử thách: tạo một cánh tay robot nhỏ và điều khiển nó trong vòng 1 tháng! Tháng 4/2021.
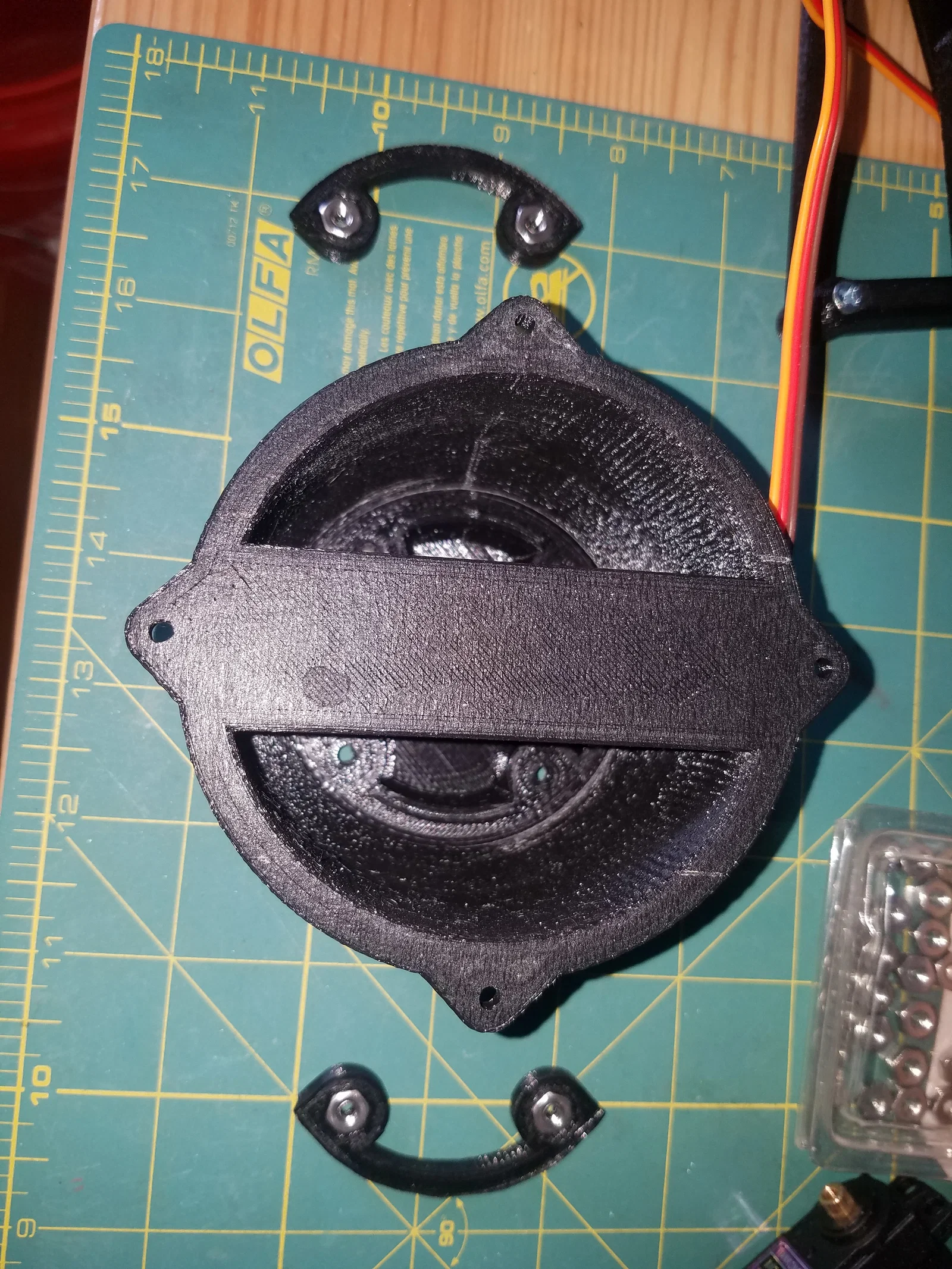
Mình tham khảo khá nhiều dự án khác trong mảng 3D printing để lấy cảm hứng và hiểu cách làm. (EEZYbotARM, MeArm và nhiều dự án khác nữa, cảm ơn mọi người!)
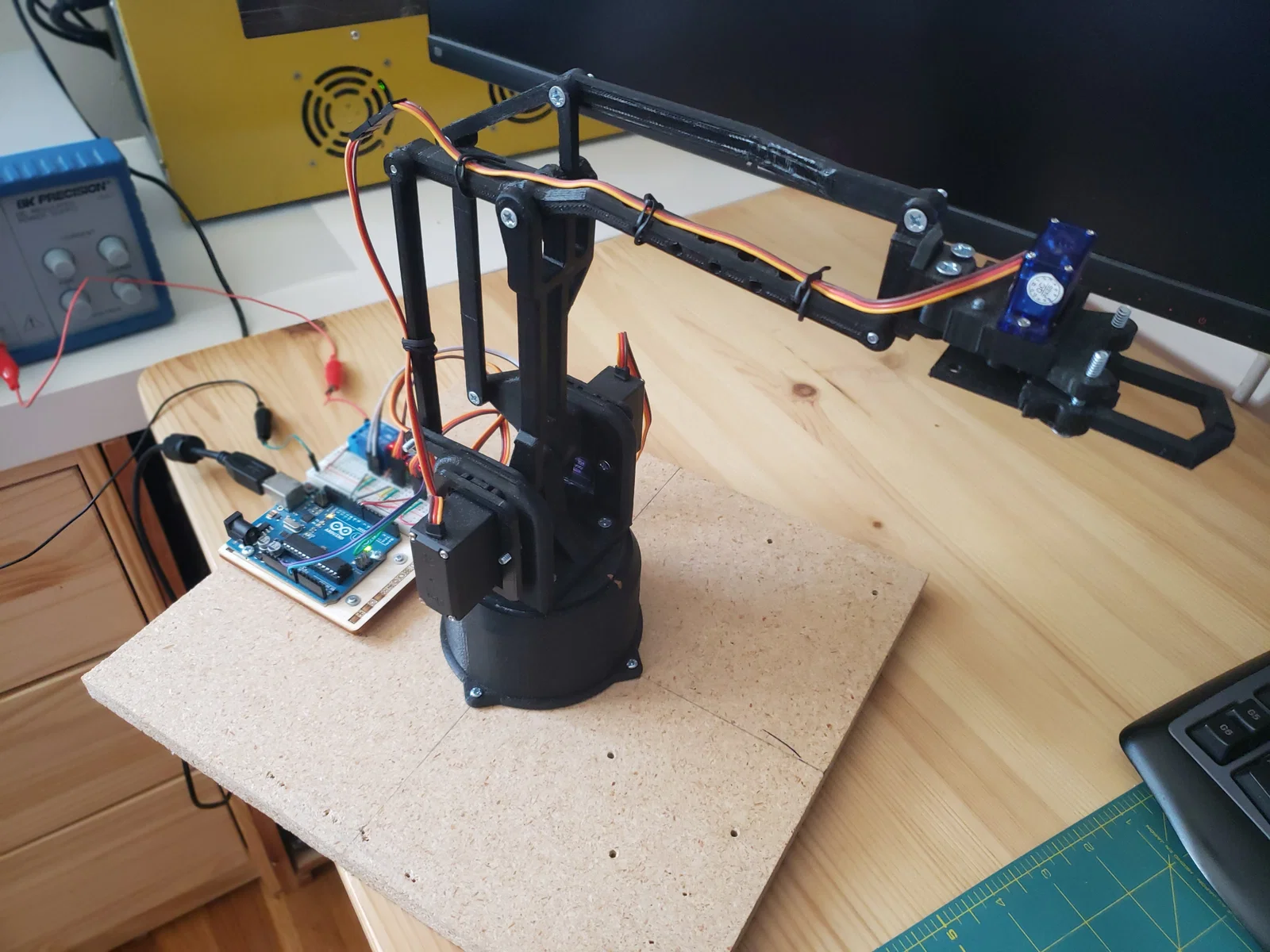
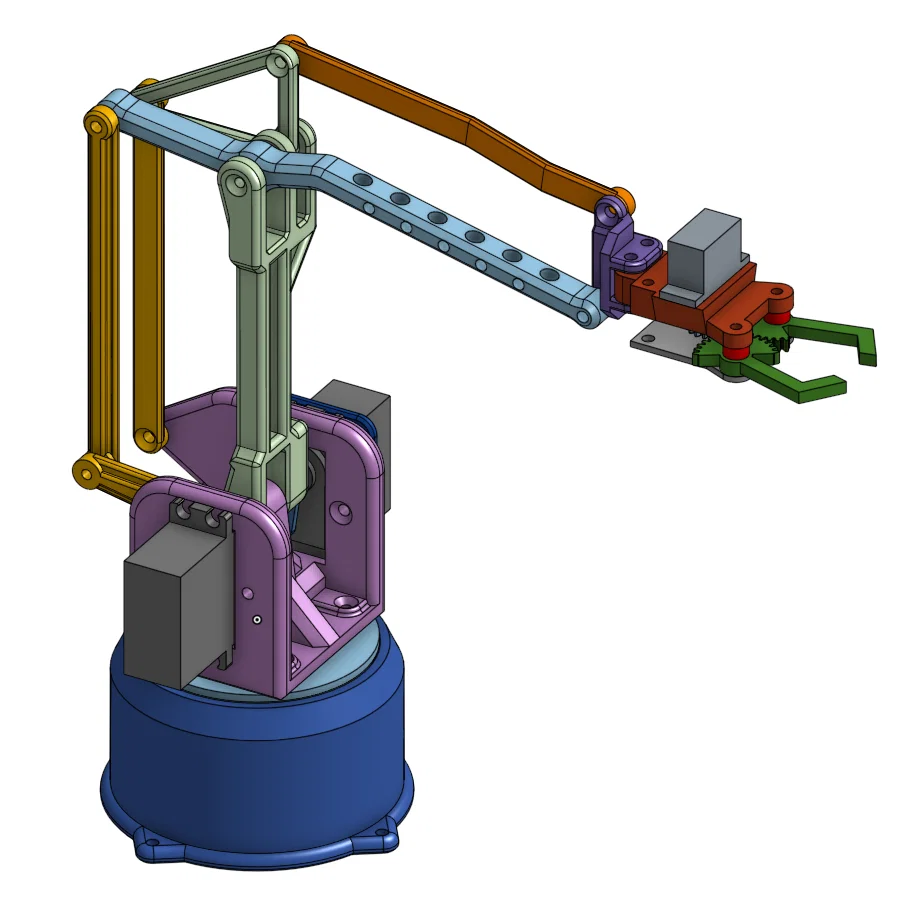
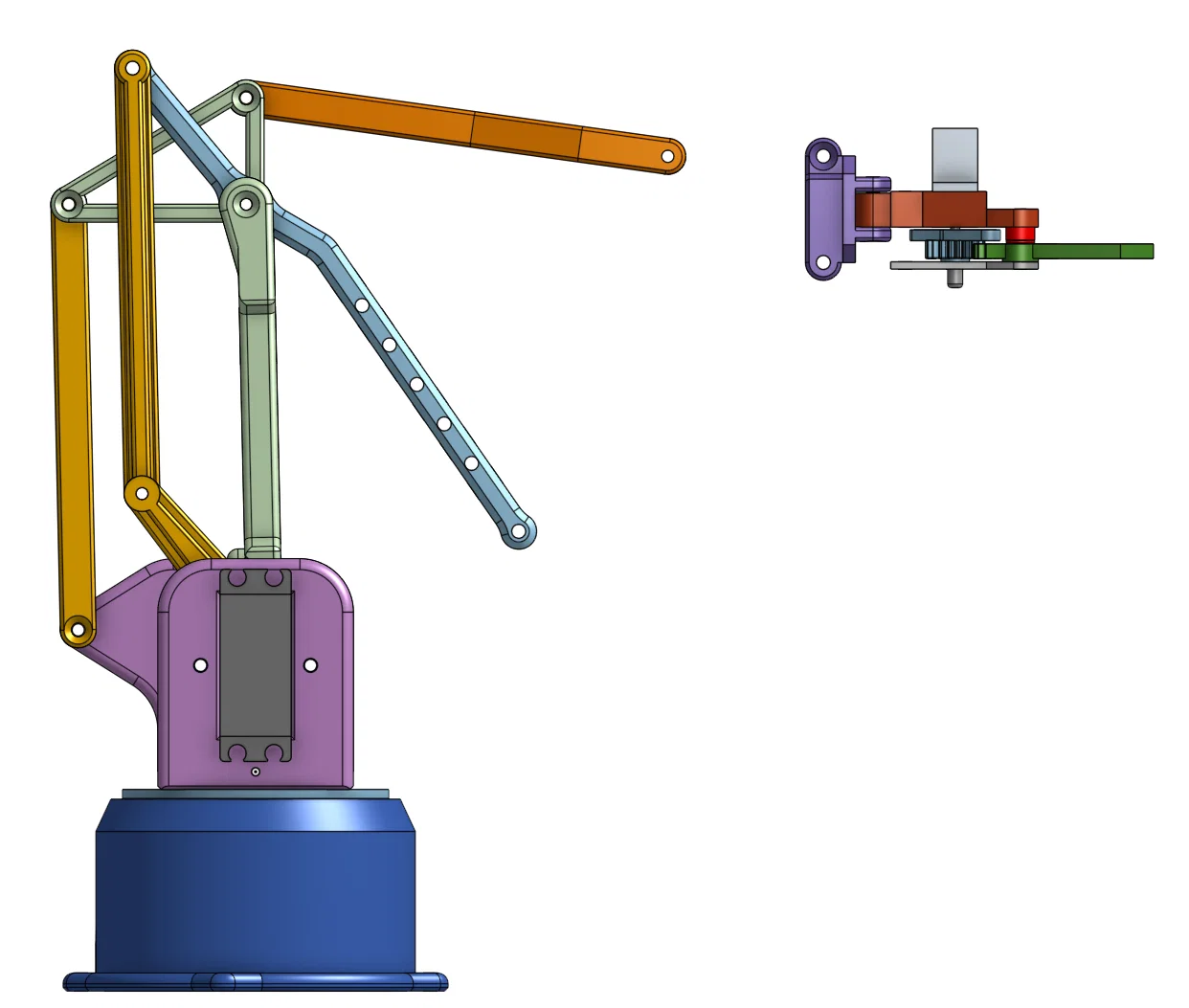
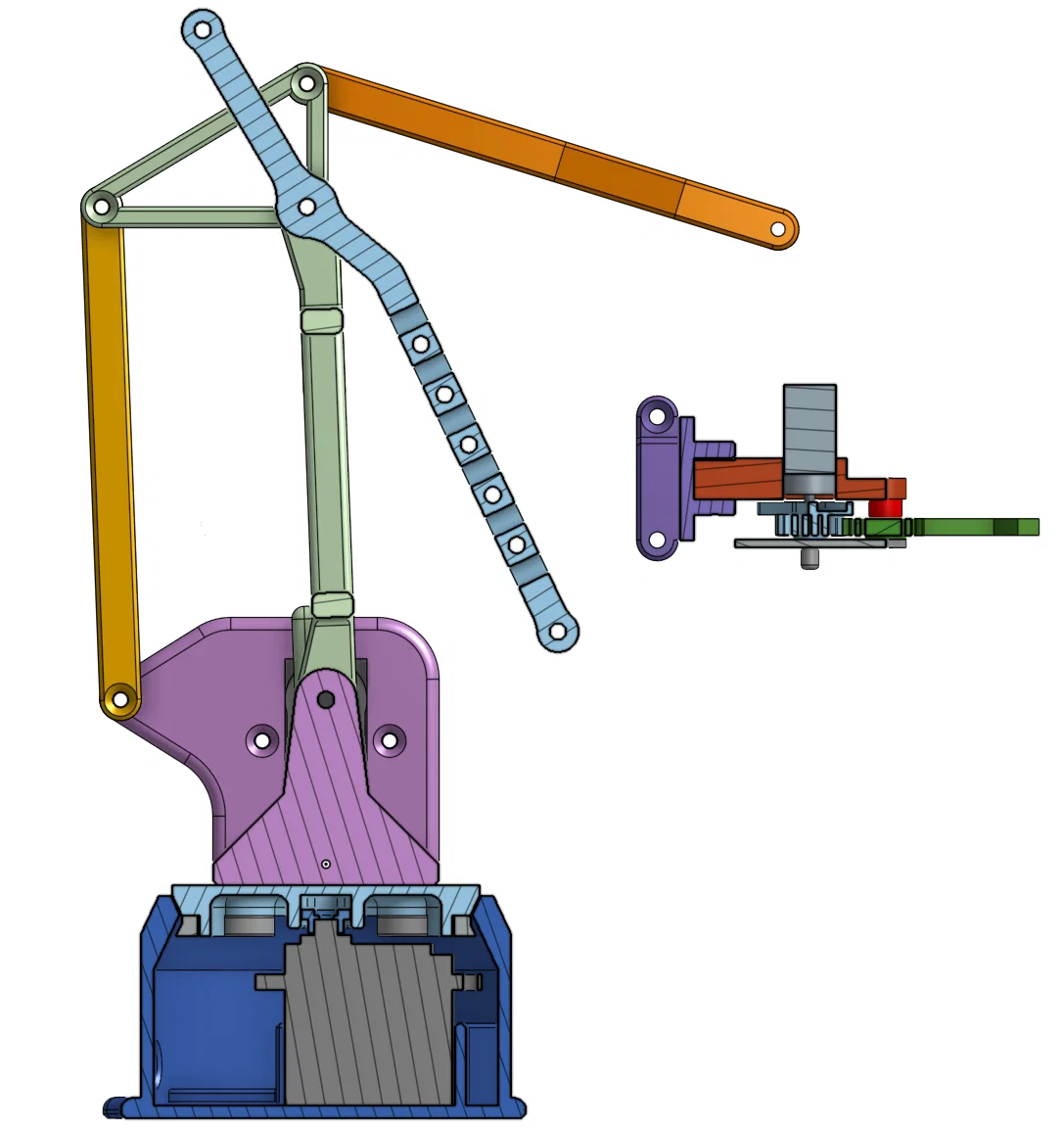
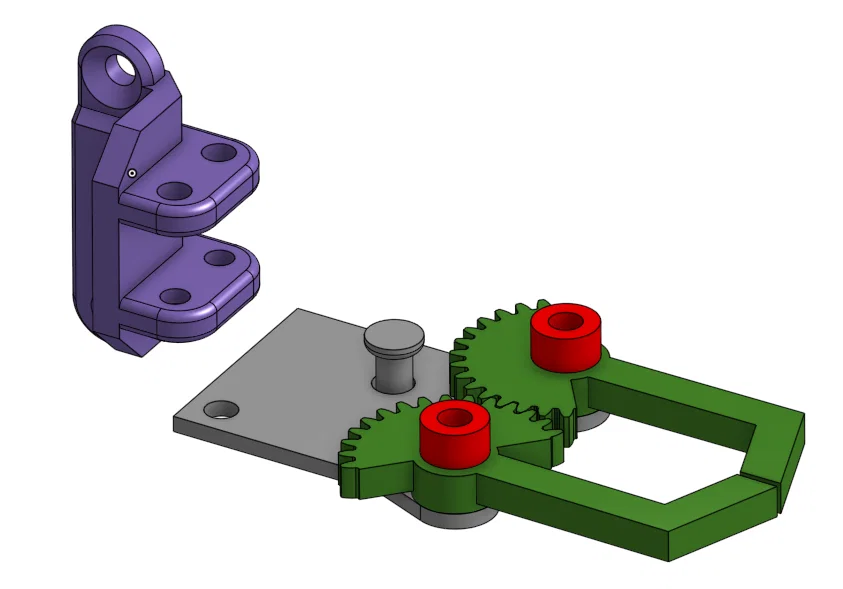
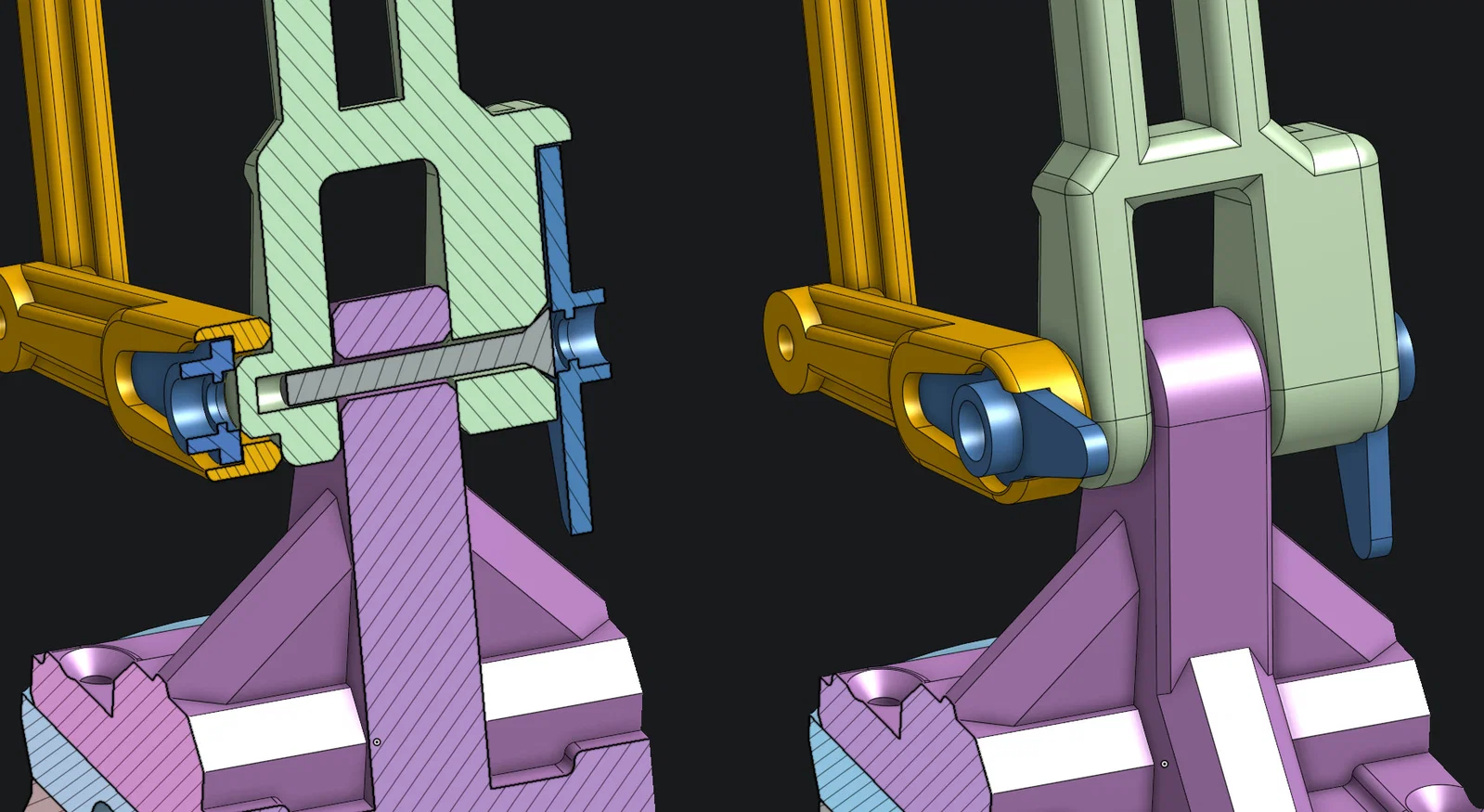
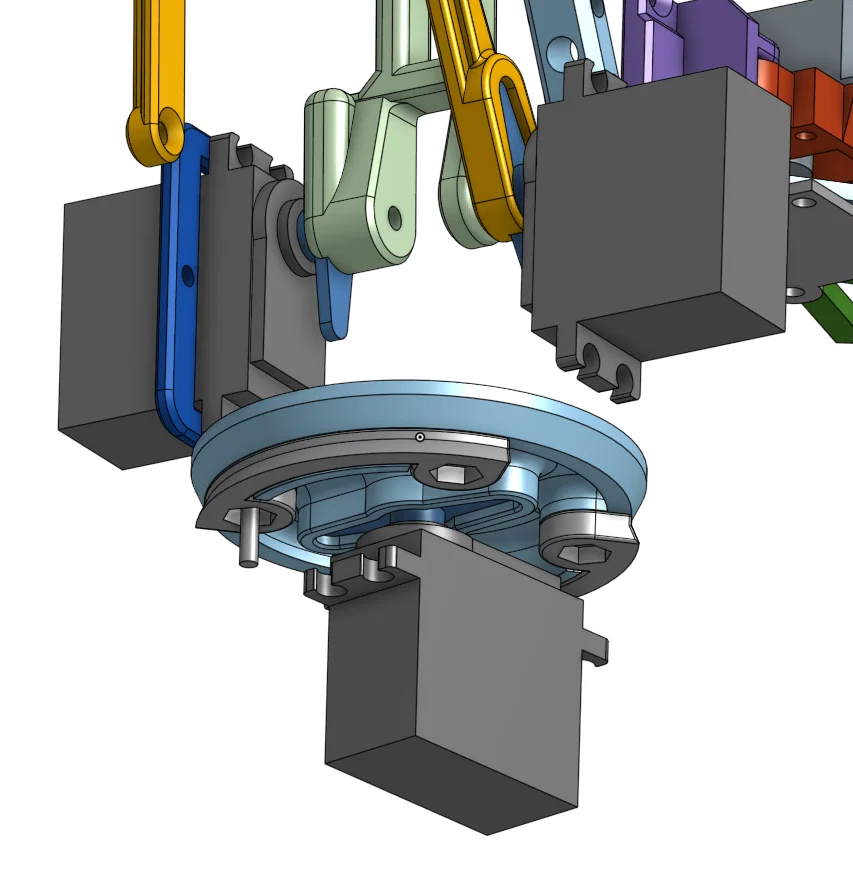
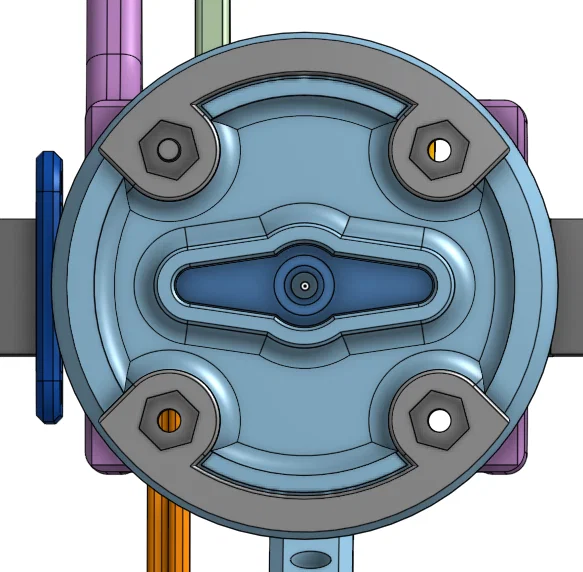
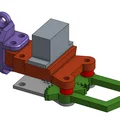
Cánh tay này được thiết kế trong OnShape, điều khiển bằng Arduino, và có HMI (human machine interface) được làm bằng WinForms.
Với bộ điều khiển, bạn có thể cho chạy thủ công (manual movements), nhưng cũng có thể “teach” từng vị trí và phát lại thành một script lặp (looping script)!
Bạn có thể xem/lấy Arduino code và tải file HMI .exe (làm bằng WinForms) từ GitHub: https://github.com/Hobbesdcc/RobotArm (xem mục “Releases” bên hông trang GitHub để tải Windows binaries, file exe)
Có thể ngoài kia có những cánh tay 3D print khác hoàn thiện hơn mẫu này! Nên nếu bạn muốn lắp ráp nhanh, ít phải vọc vạch chỉnh sửa, thì có thể thử mấy mẫu đó!
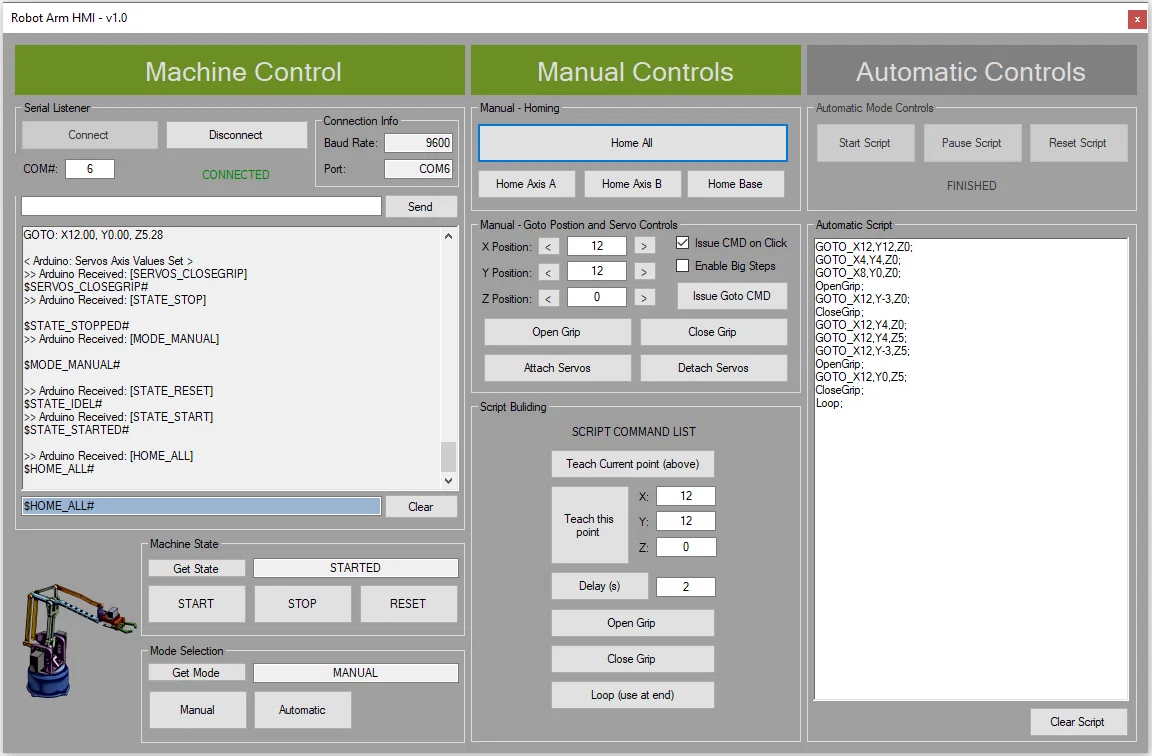
Tổng quan điều khiển (Controls overview):

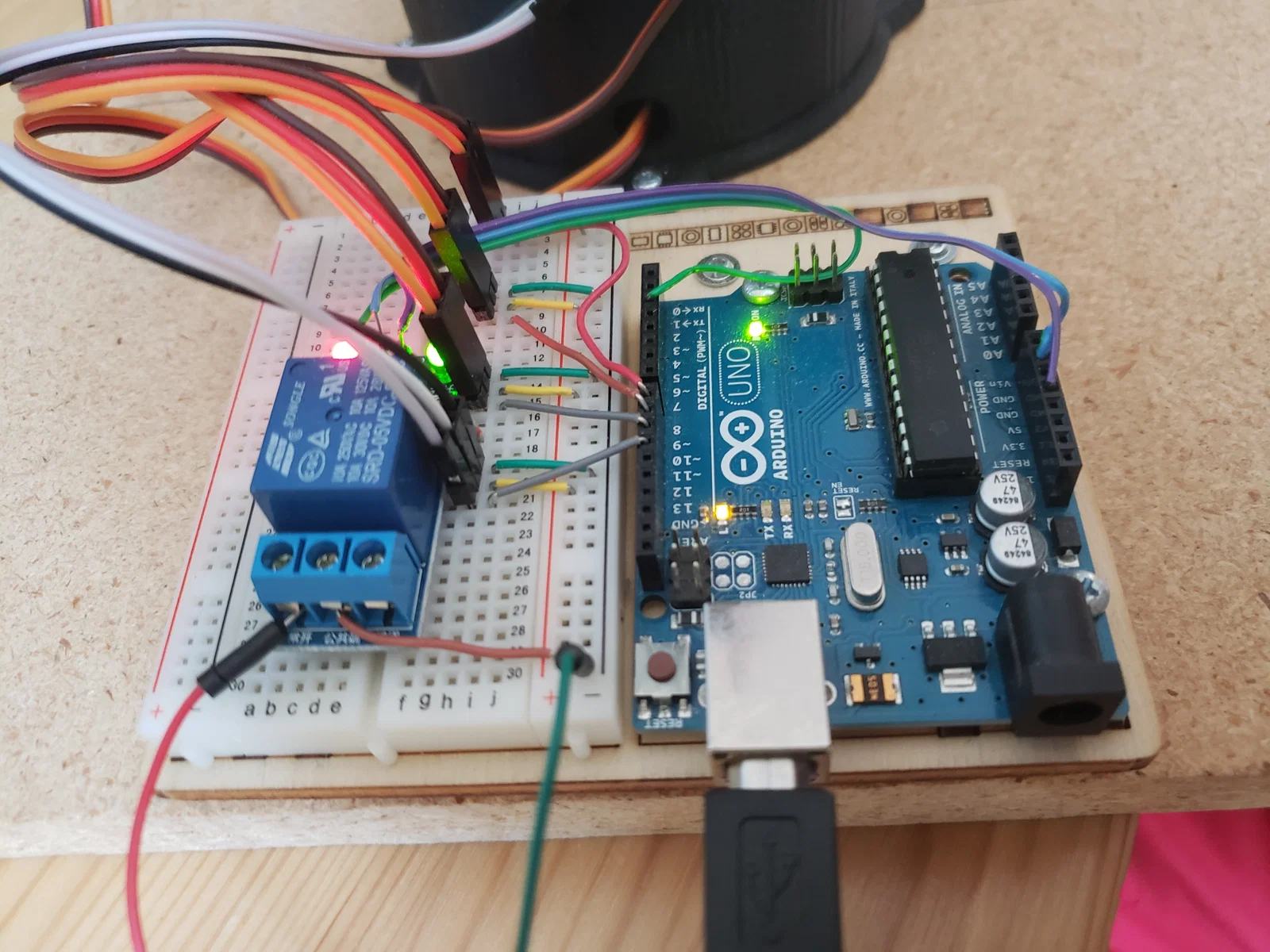
- Upload chương trình "ArmControls_Arduino.ino" lên Arduino.
- Chạy ứng dụng WinForms "ArmHMI_WinForms.exe".
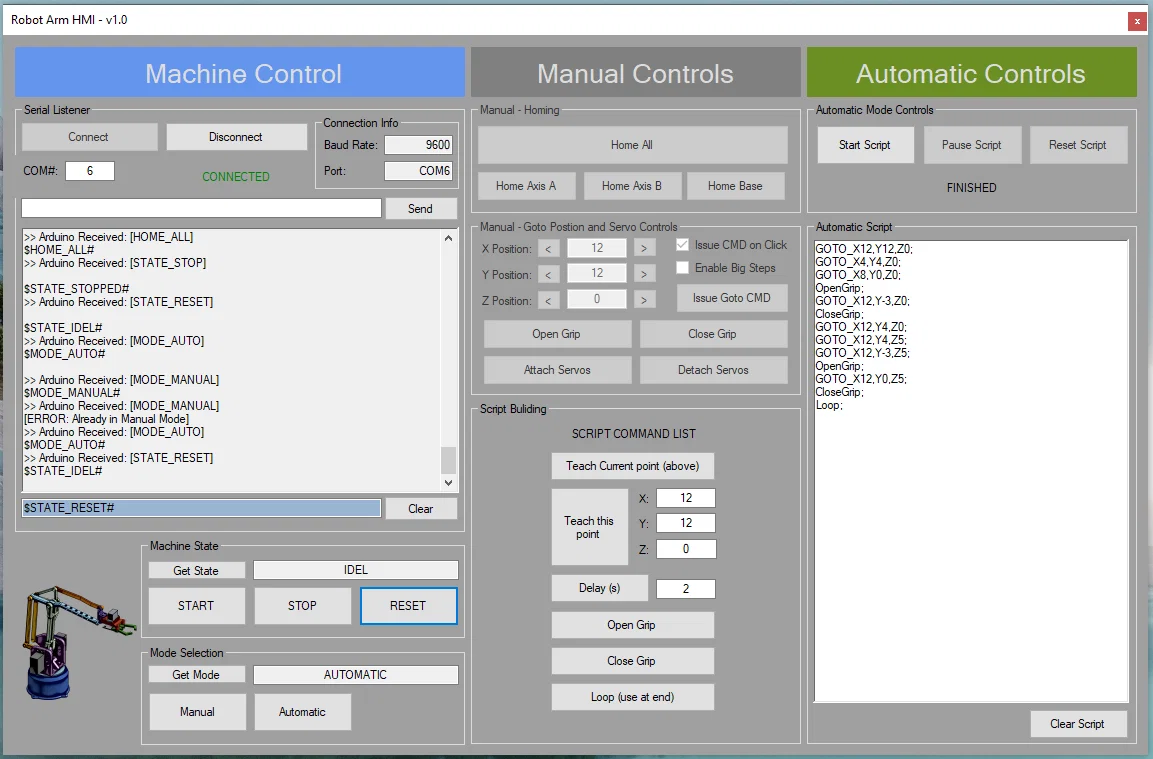
- Nhập số "COM port" mà Arduino đang kết nối, rồi bấm "Connect".
- Bấm "STOP" rồi "RESET" để đưa hệ thống về trạng thái "IDEL".
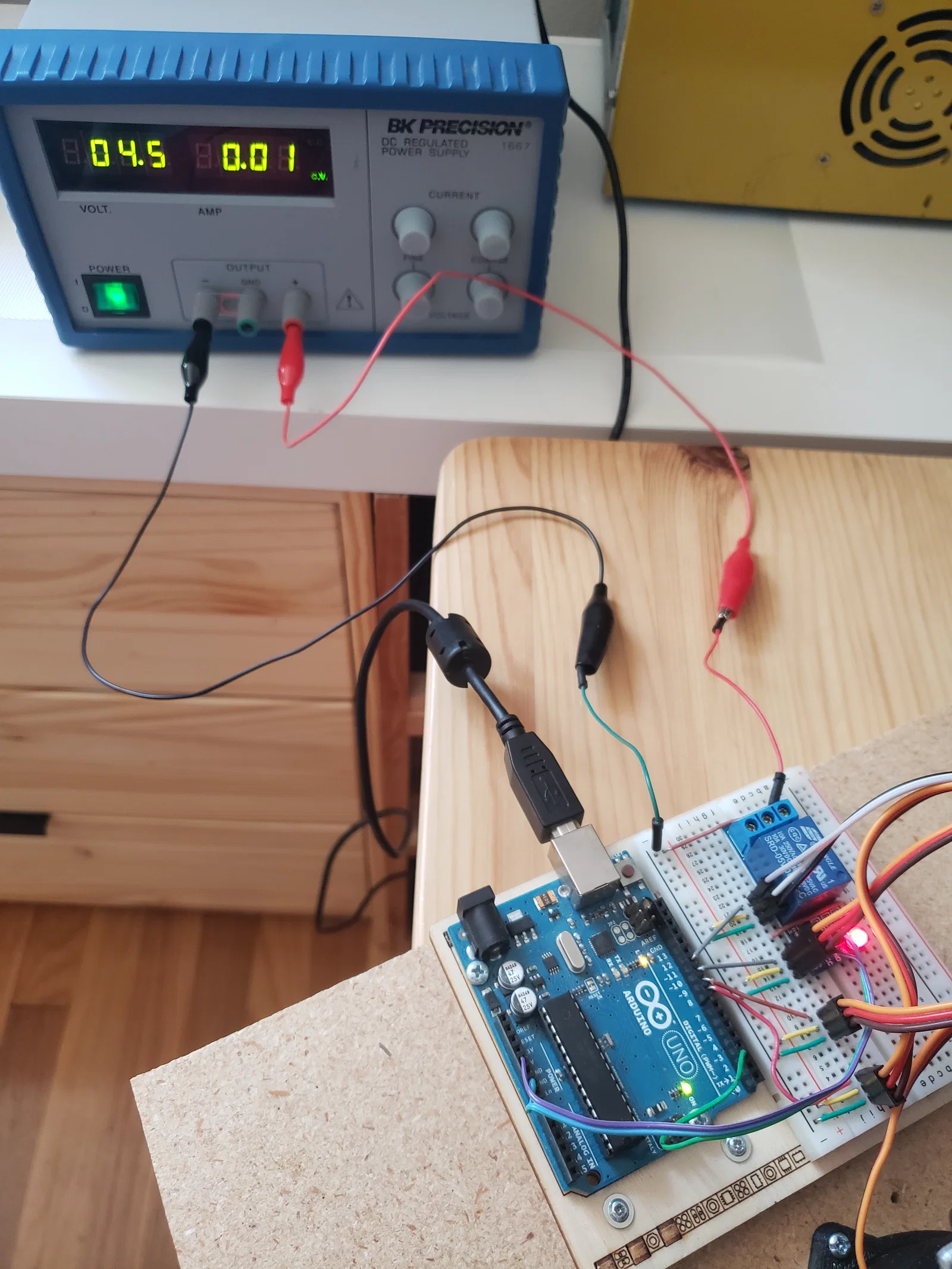
- Khi ở "IDEL", bạn có thể bấm "START". Thao tác này sẽ kích hoạt safe relay, cấp nguồn cho các servo.
- Nếu bạn đang ở chế độ MANUAL, bạn có thể dùng các điều khiển Manual.
- Bạn phải "STOP" và "RESET" hệ thống để chuyển sang chế độ AUTOMATIC.
- Khi ở chế độ AUTOMATIC, bạn có thể dùng các điều khiển Automatic.
- (gợi ý: Machine Control sẽ màu XANH LÁ khi Started, màu XANH DƯƠNG khi Idle, và màu ĐỎ khi Stopped)
Script Builder:

- Để tạo script, chuyển qua chế độ Manual.
- Di chuyển tới vị trí bạn muốn, rồi bấm "Teach Current Point" trong phần Script building.
- Bạn cũng có thể bấm các lệnh khác trong phần Script building để thêm chúng vào danh sách.
- Khi bạn thấy script ổn rồi: Stop hệ thống, chuyển sang Automatic mode, rồi Start hệ thống.
- LÚC NÀY bạn có thể "Start Script".
- (gợi ý: Script thực ra chỉ là text, bạn có thể sửa trực tiếp, hoặc copy vào/ra)
Ví dụ Script:
GOTO_X12,Y12,Z0;
GOTO_X4,Y4,Z0;
GOTO_X8,Y0,Z0;
OpenGrip;
GOTO_X12,Y-3,Z0;
CloseGrip;
GOTO_X12,Y4,Z0;
GOTO_X12,Y4,Z5;
GOTO_X12,Y-3,Z5;
OpenGrip;
GOTO_X12,Y0,Z5;
CloseGrip;
Loop;Danh sách linh kiện: (Ngoài các chi tiết 3D printed)
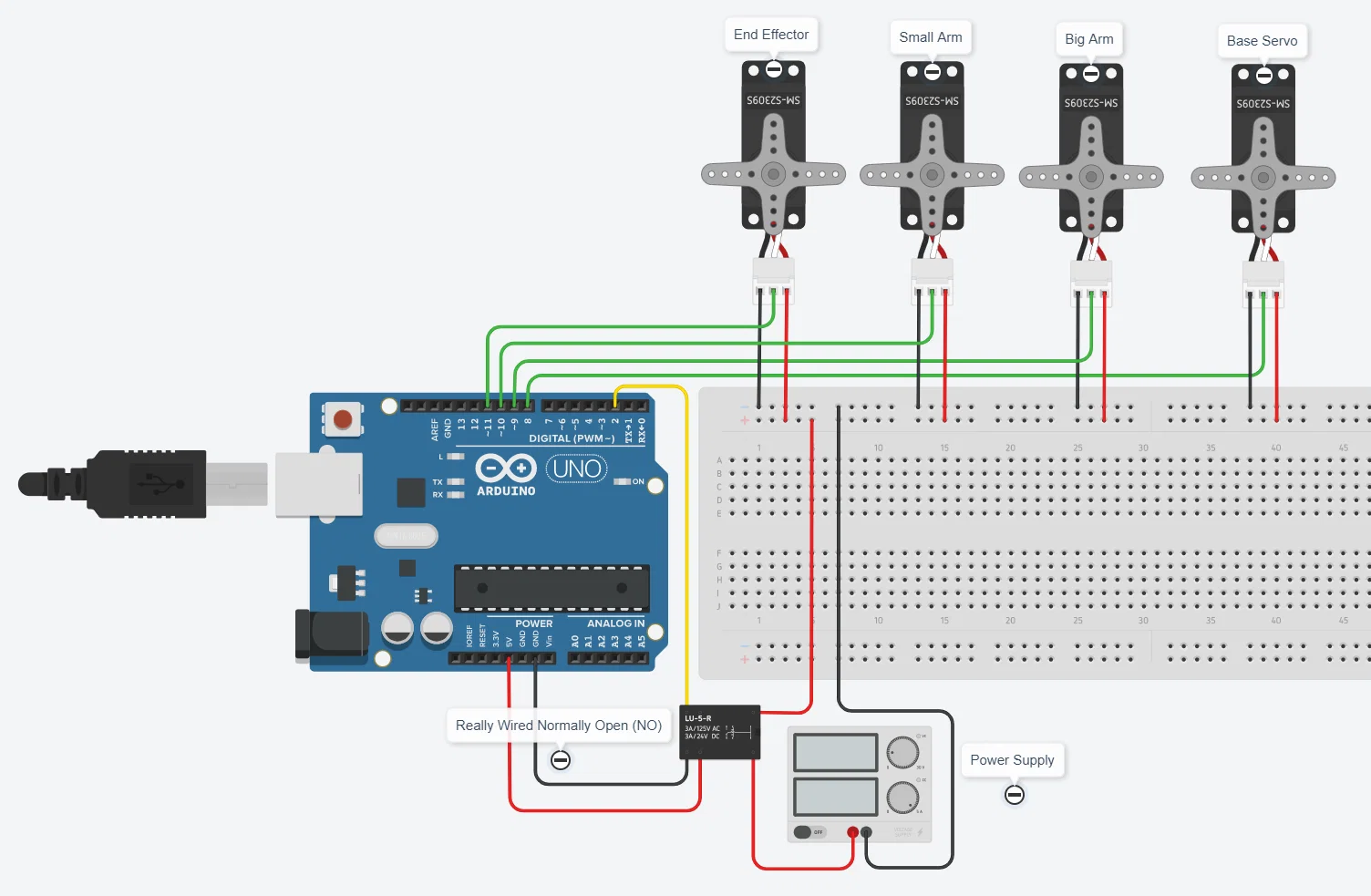
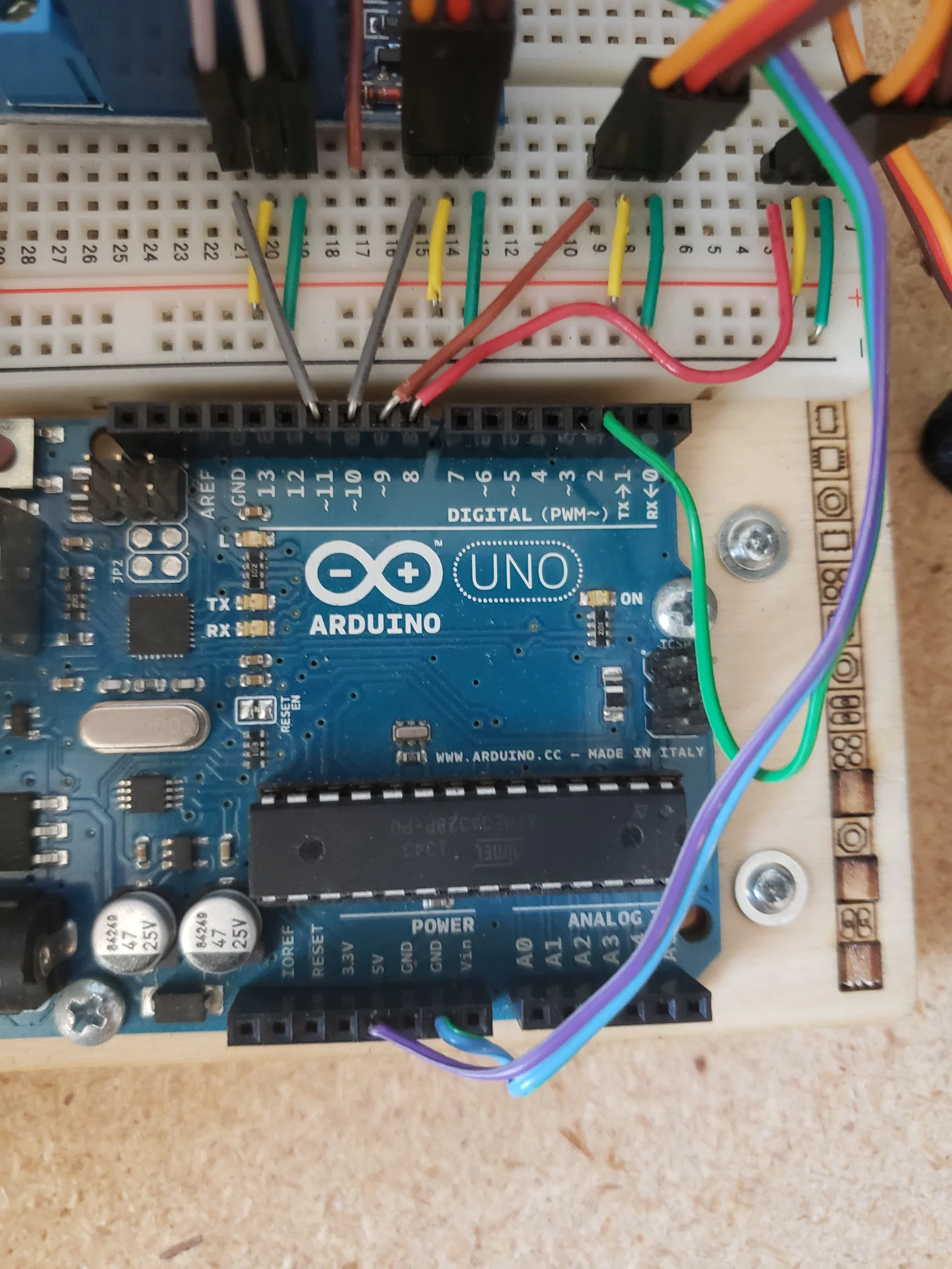
- Arduino & dây Jumper
- Nguồn (cho Servos)
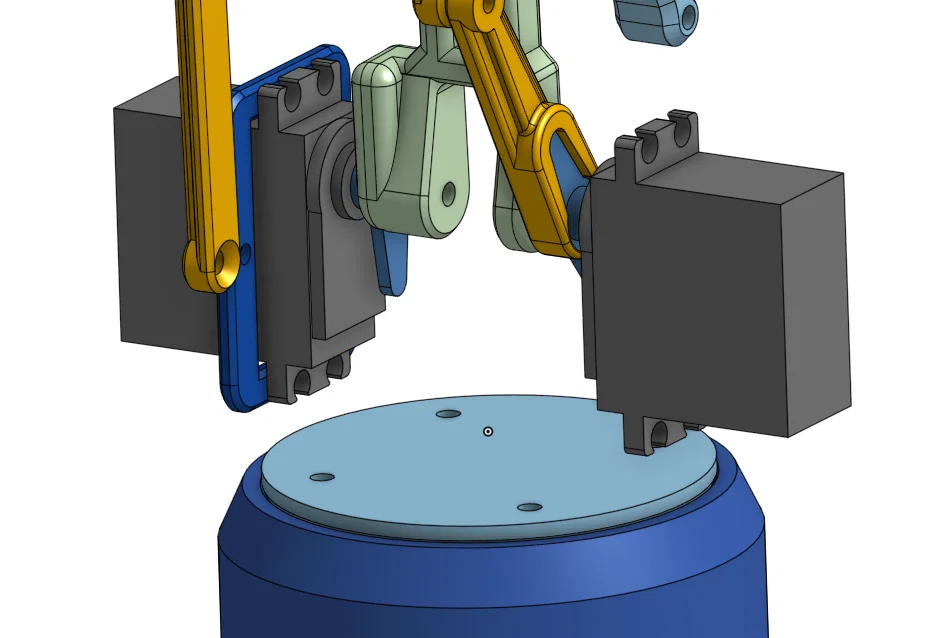
- 3x Axis Servos (MG996R)
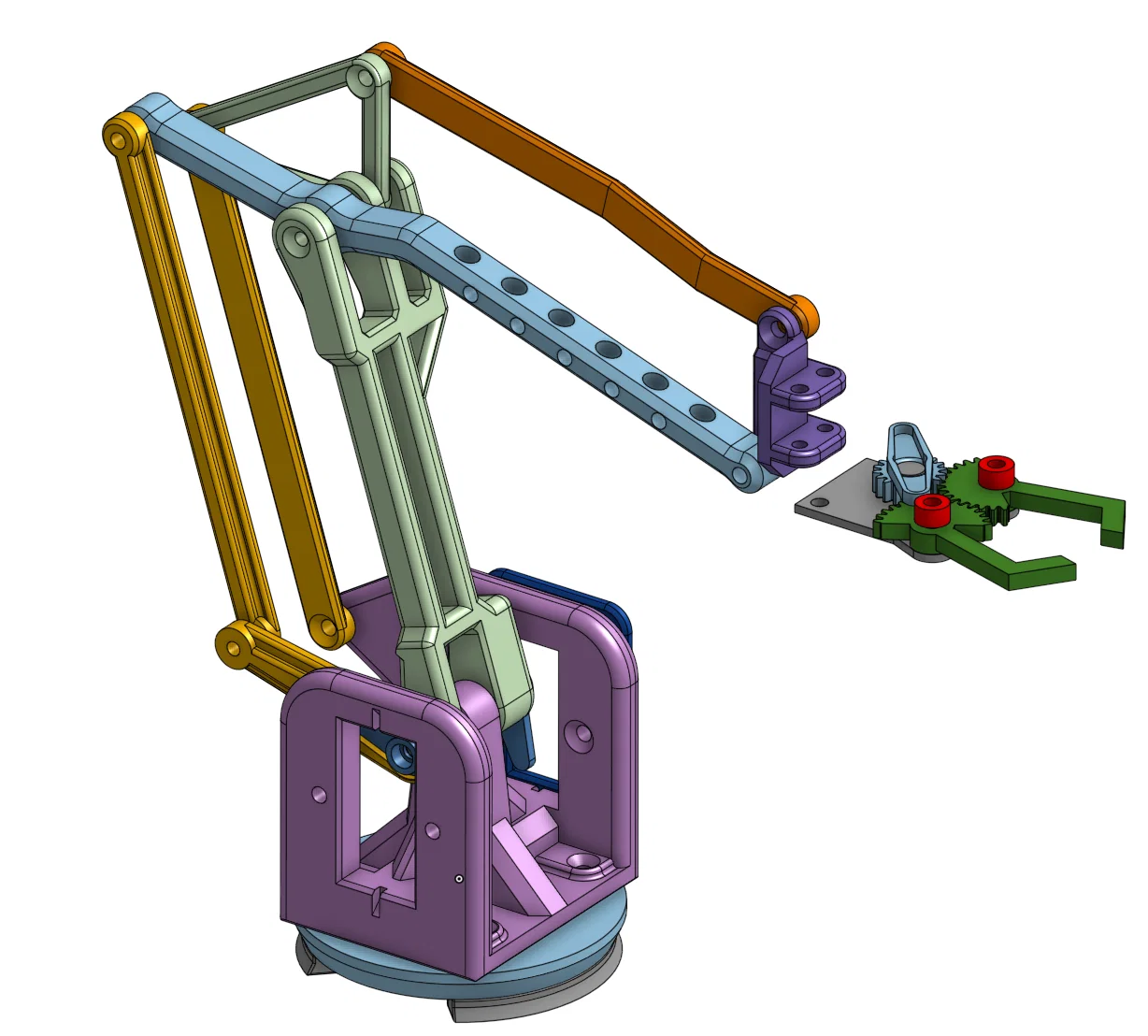
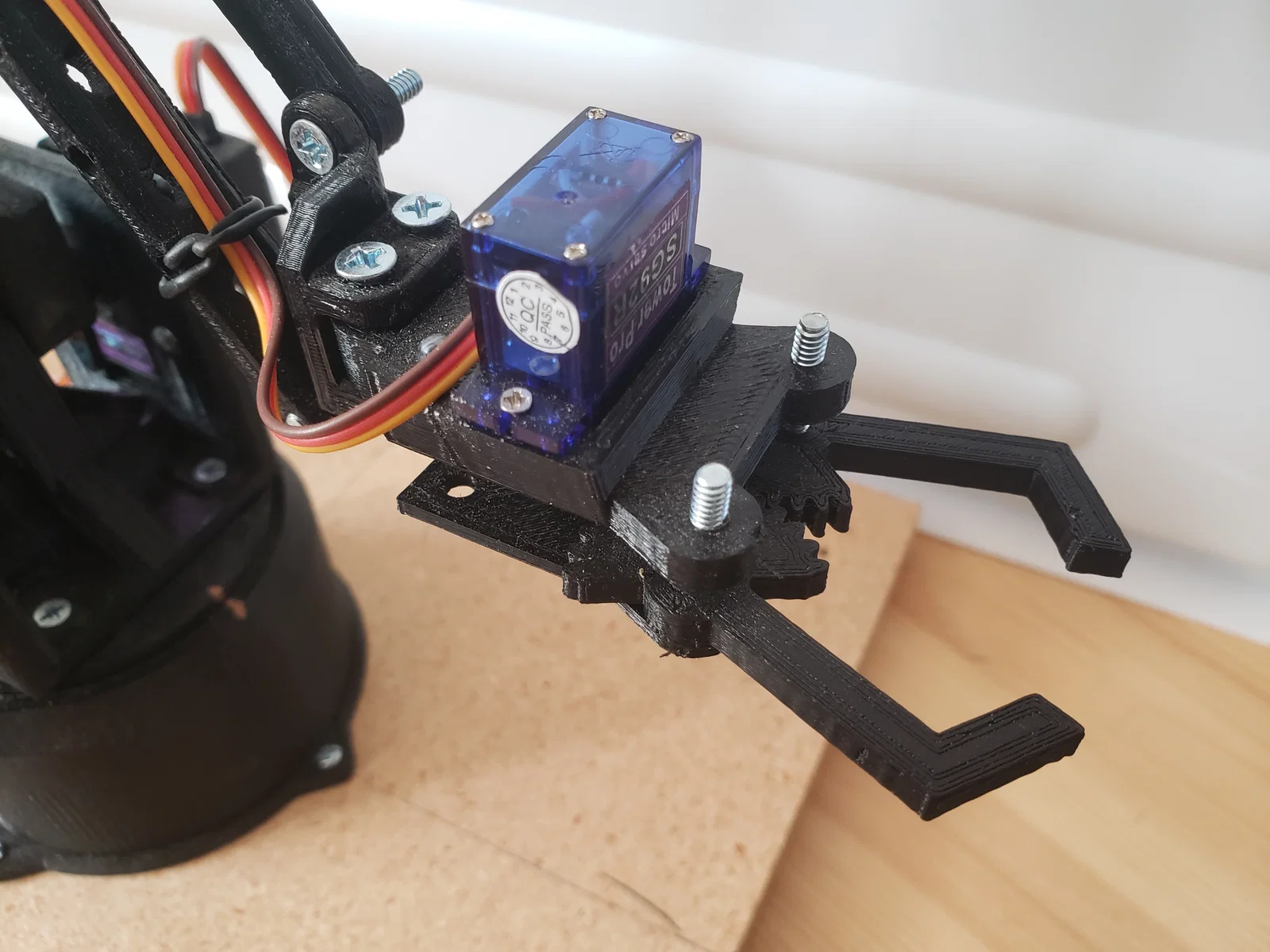
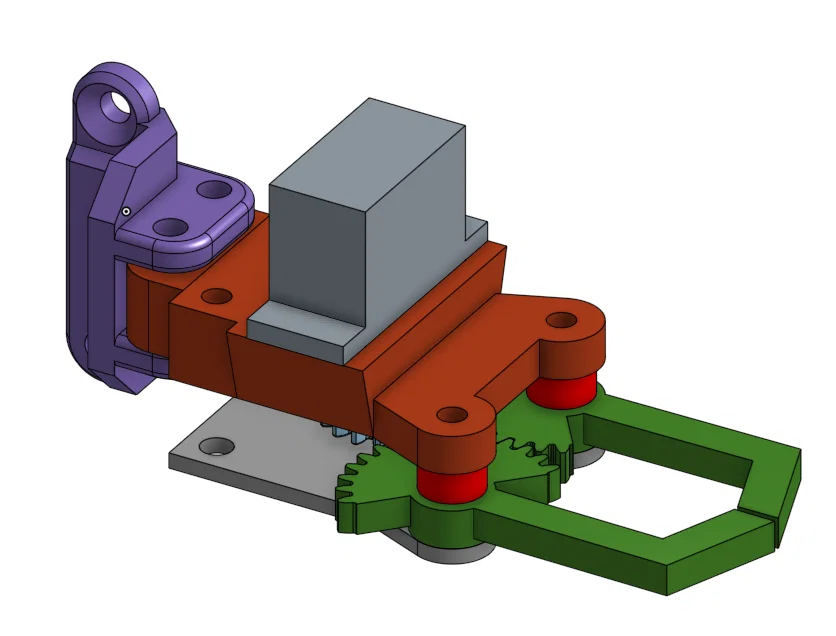
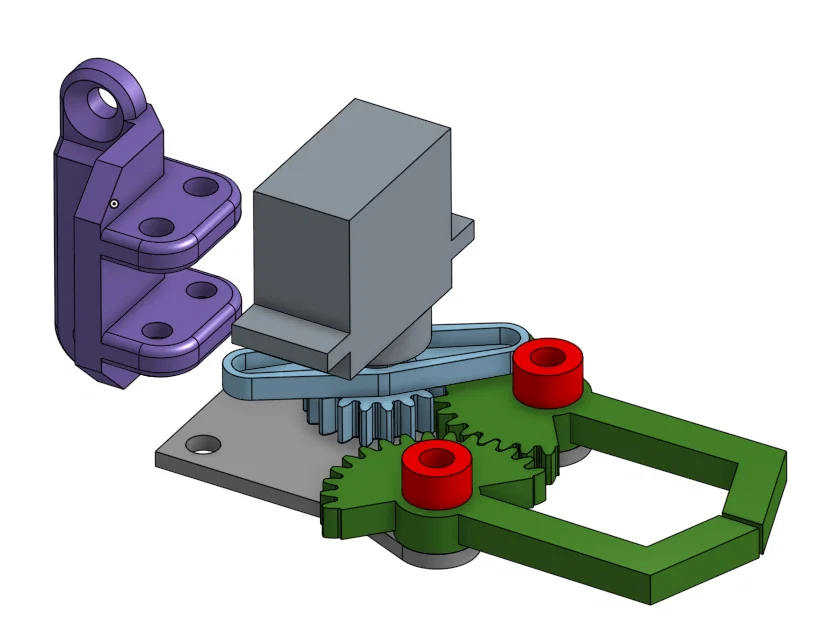
- 1x end effector Servo (Micro Servo)
- Module relay 5v (dùng cho an toàn, cho phép servo hoạt động)
- ~20x ốc máy (#6-32 x 3/4in - đầu bằng Philips)
- 1x ốc máy (#6-32 x 1in - cho trục center chính giữa các servo!)
- 4x đai ốc (#6-32 - tuỳ chọn cho base plate)

Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình




















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!