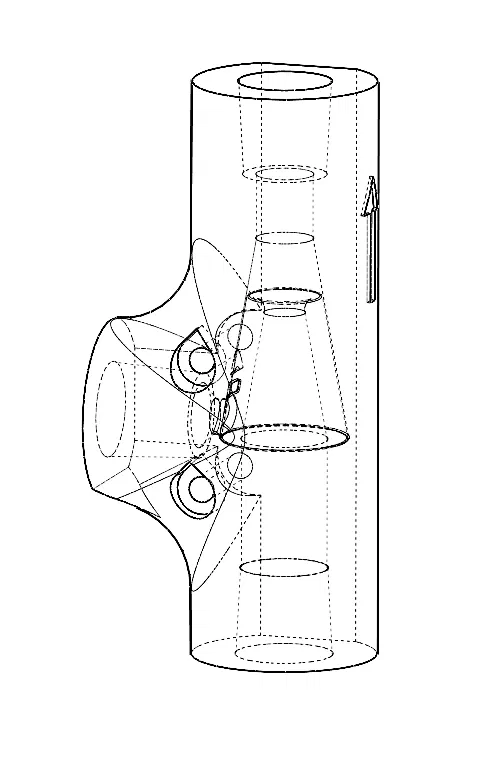
Tay nâng hút bằng giác hút Venturi Robot

Adapter nâng theo hiệu ứng Venturi dành cho robot, dùng làm end effector với giác hút. Có thể in phần suction cup bằng TPU; các điểm lắp M3 và cổng khí/hút dùng ren 1/4 NPT.
48
Lượt Xem
0
Lượt Thích
1
Lượt Tải
Cập Nhật Feb 03, 2026


Mô tả
Các lỗ lắp là chuẩn M3 để bắt/định vị, và chuẩn 1/4 NPT cho các đầu nối hút/khí (suction/air fittings).
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...



Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!