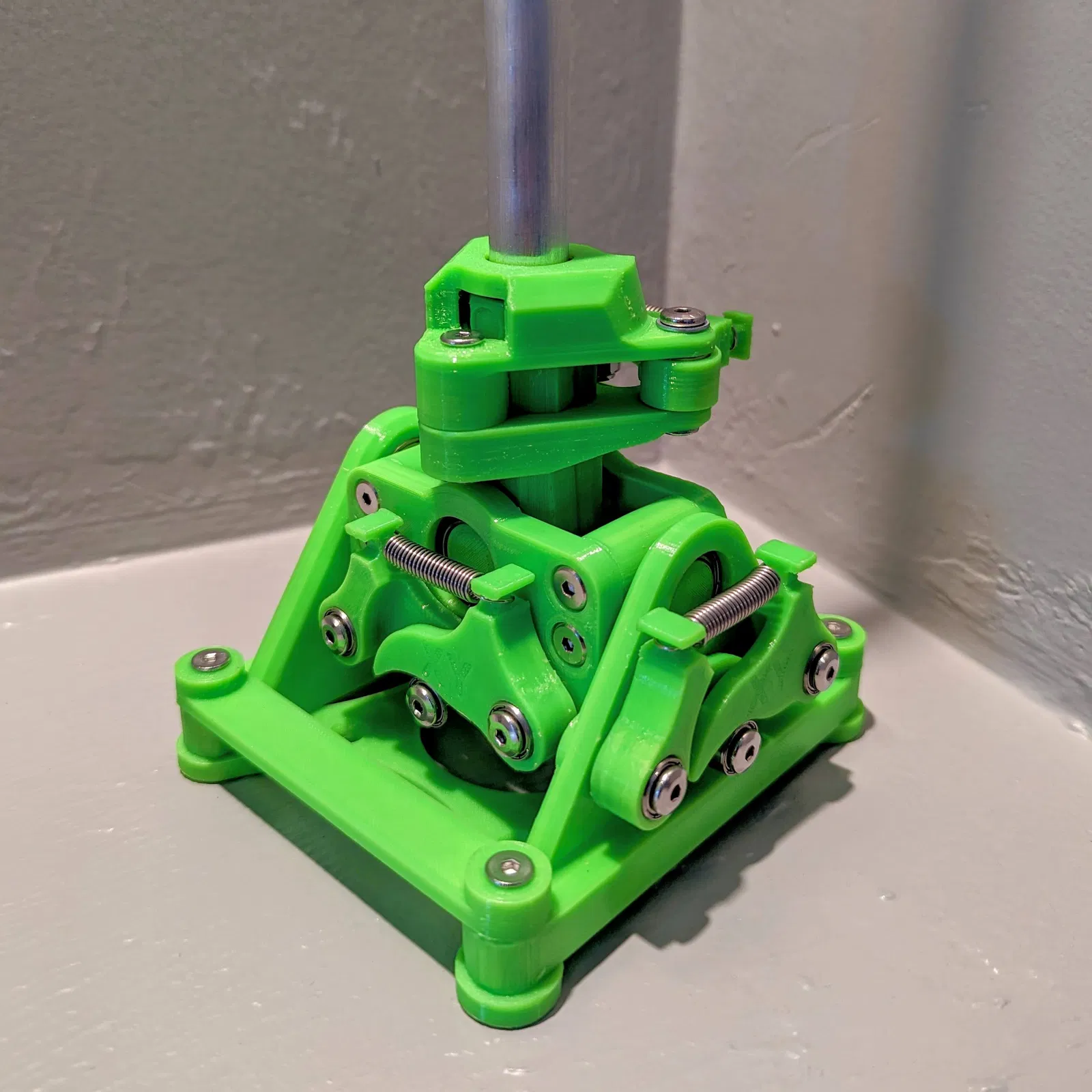
The Gimbalotl: Gimbal joystick 3 trục (3-Axis Joystick Gimbal)

Gimbal joystick 3 trục kiểu cam, gần như không ma sát và bền, lấy cảm hứng từ các gimbal “xịn” mắc tiền. File in đã test lắp thực tế, dùng bearings, lò xo, nam châm và hall sensor analog.
Mô tả
Công nhận tên này là nhờ thằng nhỏ nhà tôi nghĩ ra; nghe vui miệng thiệt.
CHỈNH SỬA: Xem phần dưới để biết chi tiết
Hồi lâu lắm rồi tôi hứng lên, thấy cái thiết kế gimbal của ulokelo nên nhờ ông hàng xóm in giúp. Ổng in xong, rồi tôi mới biết nó không có trục Z nên buồn ngang, thế là mua luôn máy in của mình, tự học, rồi nhận ra Fusion 360 vừa khó vừa thiết kế đồ cũng khó, nên bỏ cuộc. 2 năm sau, giờ thì tôi cũng biết cách “bẻ” CAD làm theo ý mình (đại khái vậy), xong ADHD làm tôi hyperfocus vô cái gimbal này và tôi “lướt con sóng” đó suốt 3 tháng. Tôi cảm giác sắp tới kiểu gì cũng hết hứng, nên phải đăng lên khi còn gần xong, chứ không là dễ… không bao giờ đăng luôn.
Thiết kế này đã được in và lắp thử, có tinh chỉnh nhẹ, nhưng tính tới ngày đăng (8/15/23) thì tôi vẫn còn vài thứ muốn refine thêm. Hiện bản iteration đầu tiên đã bị “test” khá bạo lực bởi mấy bé 7 tuổi (cầm giả làm gậy chống đi vòng vòng mấy tiếng), rồi tới tôi giật qua giật lại tổng cộng ít nhất 4 tiếng. Tới giờ chưa thấy bị cong lệch thêm hay hư hại gì, nói thiệt là cũng bất ngờ. (4 perimeters, 20% infill, PETG). Cao khoảng 4.5 inch, chưa tính cây ty nhôm.
Ống nhôm đóng vai trò làm shaft để sau này gắn grip. Nó cho phép dây đi xuyên qua an toàn xuống phía dưới vào phần gimbal shroud (sắp thiết kế? chắc vậy?) và ideally để luôn board arduino/leonardo bên trong. Hiện tại bản đăng này chỉ gồm cơ cấu gimbal thôi.
Có vài điểm cần lưu ý khi in:
- Chỉ có 1 part cần supports – Z Axis Top Cam Mount. Part này in ngược, 3 cái flange cần support. Mặt trên của flange (khi in sẽ bị đảo xuống) sẽ là vùng tiếp xúc support nên không cần đẹp hoàn hảo.
- Phần còn lại được thiết kế để in không cần support! Đúng luôn, kể cả 2 nửa Lever Body, nhưng chuyện này còn tùy máy bạn in sạch cỡ nào. Không có góc treo nào quá 45 độ, trừ mấy cái vòm của 2 nửa Lever Body; thường vẫn ổn.
- Khuyên dùng brim ngoài. Cong vênh là toang trong dự án này, và làm dự án này xong tự dưng tôi mê brim luôn. Dùng dao lam cắt bỏ là được, những bề mặt có brim trong thiết kế này không cần phải hoàn hảo, tôi đã canh sẵn.
- Tôi cũng khuyên in outer perimeters trước. Độ chính xác kích thước khá quan trọng.
- Tôi có slot bắt cho mỗi trong 3 cục magnet, nhưng chưa có chỗ cụ thể cho hall sensor. Tôi muốn test thêm, với lại cảm biến dán keo đại chỗ nào cũng được. Có thể iteration sau khi tôi mua đúng loại vào ngày mai. Tôi dự tính trục X & Y đặt sensor ngay dưới bearing mount của mỗi trục, còn trục Z thì tương tự nhưng trên Top Cam Mount.
- Tolerance thiết kế khoảng 0.2mm (+/- 0.2mm tùy vị trí/hướng in).
- Tôi có kèm file STEP, cứ thoải mái chỉnh sửa để canh tolerance.
- Xem hình thứ 3 bên dưới và ghi chú phía trên về cách in cam. Tôi còn chà mặt cong của cam (nơi roller bearings lăn) bằng giấy nhám 600 grit. Làm vậy trượt mượt như bơ luôn, thiệt sự khó tin.
- Cứ redesign và repost thoải mái, nhưng nhớ ghi nguồn giúp nha!
Bản in này cần thêm hardware khác:
- 7x 6702 Bearings
- 18x 685 Bearings
- Ống nhôm 15mm x 10mm, dài ít nhất 20 cm, (đường kính ngoài là quan trọng nhất)
- Vít M4 đầu wafer phẳng – 10x 12mm, 10x 18mm, 10x 30mm (số lượng chưa chốt chính xác)
- Đai ốc ống M4 (sleeve nuts) – 10x 8mm, 10x 14mm, 10x 18mm (số lượng chưa chốt chính xác)
- 3x lò xo kéo dài 30mm, rộng 6mm (có thể 8mm sẽ tốt hơn), dày 0.8mm
- 3x nam châm đĩa 3mm x 6mm
- 3x Linear Analog Hall sensors (KHÔNG phải loại digital, mới biết luôn haha)
Tôi mua tất cả mấy món trên từ aliexpress khoảng ~ $40 (…và thêm một đống đồ không xài tới, nhưng đừng méc vợ tôi. Rồi cũng sẽ xài thôi!)
Wishlist ví dụ Ở ĐÂY – ĐÂY CHỈ LÀ VÍ DỤ, mấy món trong list không lưu lại biến thể tôi chọn như kích thước này nọ đâu.
Xem mấy Screencap dưới đây để tham khảo hướng đặt khi in:


Với mấy cái cam, bạn cần in 4x cam XY và 2x cam Z. Tôi có đánh dấu để sau khi in dễ nhận biết. Để ý layout in của tôi: các bề mặt cong sẽ tiếp xúc roller bearings được đặt quay ra ngoài. Mục đích là để nozzle không chạy cắt qua những perimeters đó. Mình muốn mặt đó mượt nhất có thể, nên tôi cũng “paint seam” bằng prusaslicer dọc theo các đoạn bao quanh chỗ gắn bearing:

Một số hình lắp ráp:

Ở đây bạn thấy lỗ khoan trên cây ty, để gắn Z Axis Roller Arm vào ty. Tôi dùng cái máy khoan rẻ tiền thôi, tưởng phải cần drill press mà hên là không cần.

Cần ấn nhẹ để Top Cam Mount “click” và trượt qua Z Axis Roller Arm; ở giữa hai cái đó kẹp một vòng bi 6702.

Tôi không có hình chụp lúc lắp Lever Body và Z Axis Bottom Mounting Plate, nhưng xem gif kế tiếp để hình dung cách nó hoạt động. Bạn sẽ thấy 1 bearing ở đây, còn 1 cái nằm sâu bên trong. Sau đó Z Axis Bottom Mounting Plate trượt lên trên đỉnh của 2 nửa Lever Body và giữ chúng lại với nhau. Khớp này cần vừa khít khá quan trọng; hơi lắc nhẹ chút cũng được nhưng càng chặt càng tốt. Rồi bạn trượt ống nhôm vào nửa lever body và bắt 2 tấm Z Axis Mounting (trên và dưới) lại với nhau, kẹp giữa là Z Axis Cams (thấy ở dưới)


Ừm, mong là giải thích vậy hiểu được!
Tới phần lò xo!

Lò xo gắn như vầy!

Giờ bắt đầu lắp Gimbal Core…

Chuẩn bị cam…

Gắn xong! Làm bước này trước khi ráp core, và trục còn lại cũng vậy, gắn qua bên khung lớn.

Sẵn sàng gắn vô khung! Đại khái mấy bước còn lại cũng tương tự thôi nên vậy nha. Tạm thời hình cuối.
To DO (để coi):
- Hệ damper – tôi có vài ý khá ngon, có cái có thể vừa hoàn hảo mà không cần chỉnh sửa gì…
- Chuẩn hóa ốc/vít. Tôi đã rút xuống còn một danh sách ngắn rồi, nhưng muốn gọn hơn nữa
- Test vị trí hall effect sensor, v.v.
- Housing / case
- Test thêm profile cam.
- Test thêm độ cứng lò xo
- Mấy thứ khác
(8/15/23) Gimbalotl Version 1.0 – Đã đăng bản gimbal hoàn chỉnh & hoạt động (chỉ cơ cấu).
(8/22/23) Phát hiện tôi cần nam châm lớn hơn, tăng kích thước slot lên khoảng ~ 5mmx10mm. Hall sensor 49E chạy ngon với cấu hình đó. Tối nay sẽ update file.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!