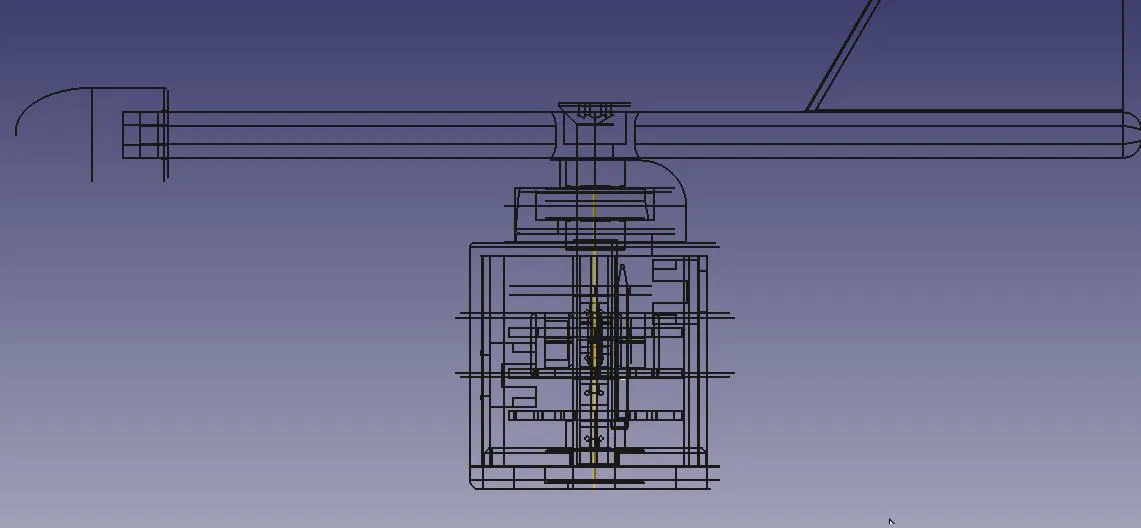
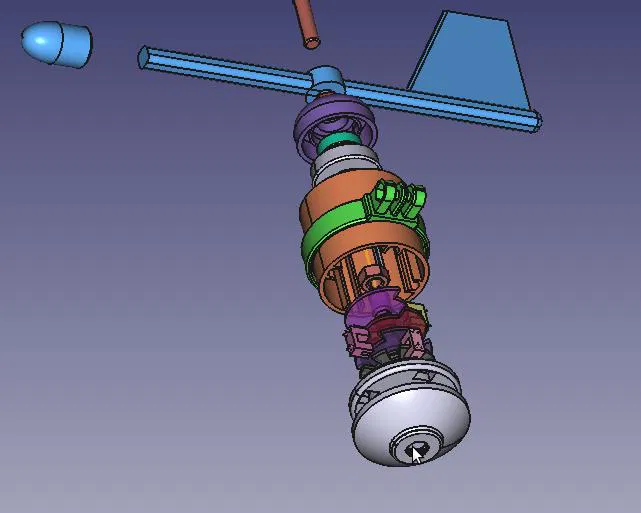
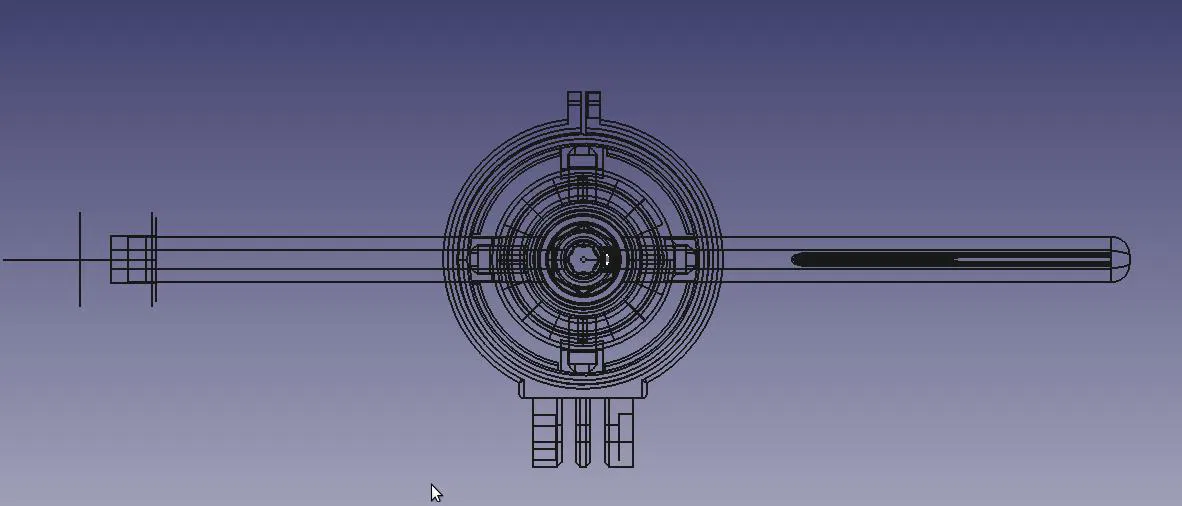
YA-WV-V0.8 – Cánh gió dùng absolute encoder quang 4-bit (22,5°)

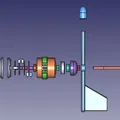
YA-WV-V0.8 là mẫu cánh gió DIY dùng đĩa optical encoder và 4 fork-type optical couplers (tận dụng từ máy in) để tạo absolute encoder 4-bit, 16 vị trí, độ phân giải 22,5°. Phù hợp mục đích học tập/giải thích nguyên lý.








Mô tả
Cánh gió dùng Encoder
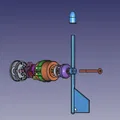
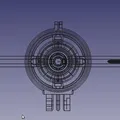
Cánh gió này đạt độ phân giải hướng 22,5° bằng cách dùng đĩa encoder quang (optical encoder disks). Các cảm biến quang (fork-type couplers) được tận dụng lại từ máy in phun bị bỏ hoặc bị lỗi.
Mục tiêu chính của mẫu này là giúp việc hiểu nguyên lý hoạt động của absolute encoders (encoder tuyệt đối), vốn được dùng trong các hệ thống chuyển động chính xác, trở nên dễ hơn trong bối cảnh giáo dục.
Hệ thống triển khai absolute encoder 4-bit, cho ra 16 vị trí rời rạc, tương ứng với độ phân giải góc: 360°/16=22.5°360° / 16 = 22.5°360°/16=22.5°.
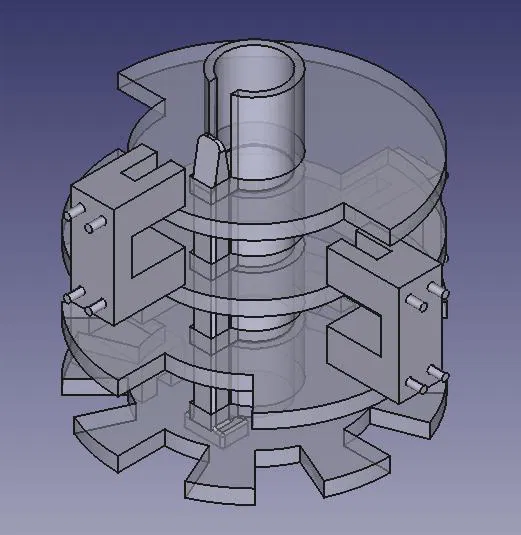
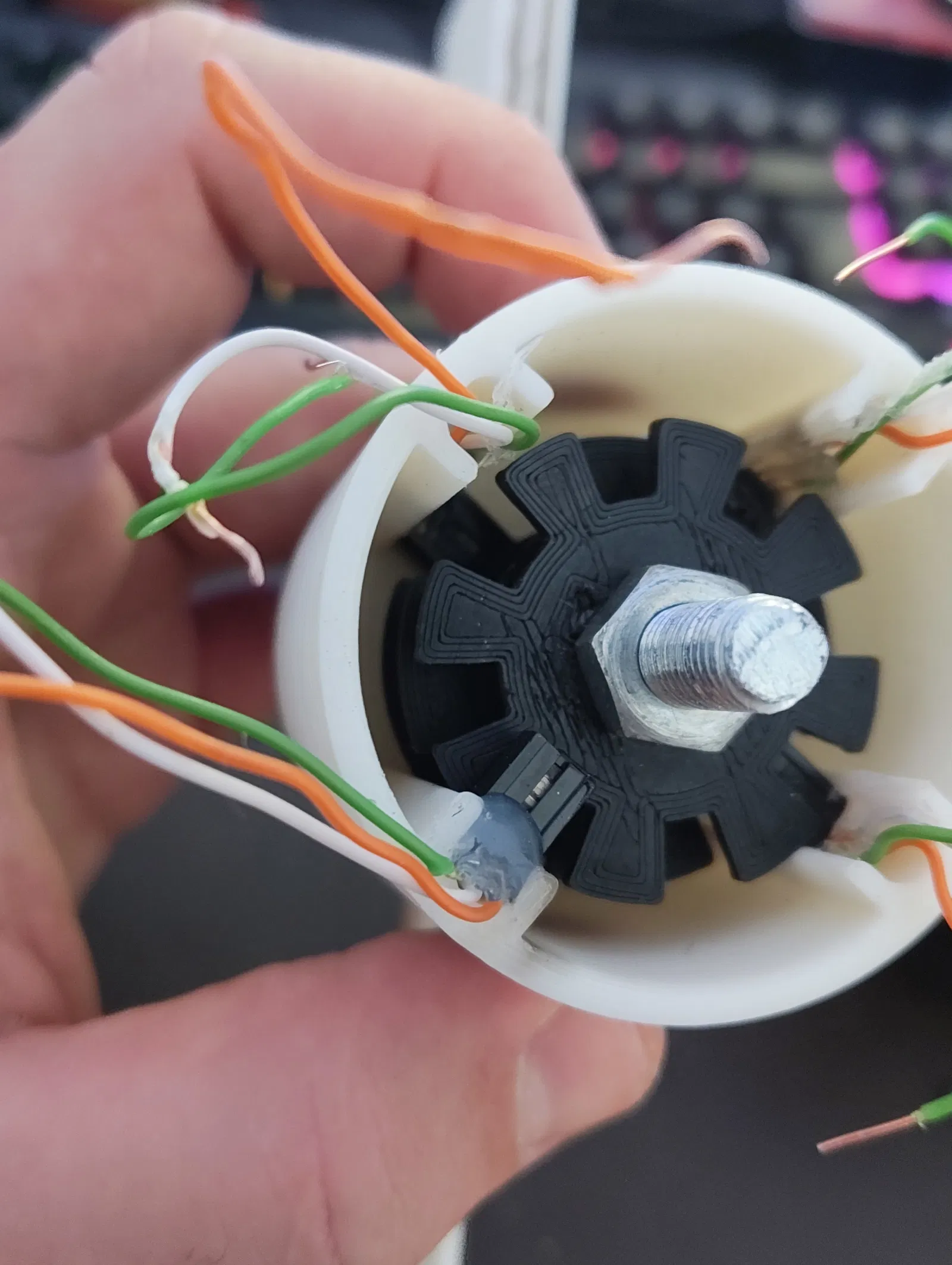
Phần khó nhất của thiết kế là căn chỉnh chính xác các đĩa encoder. Việc căn chỉnh được thực hiện bằng cách luồn một chốt (key) qua các lỗ keyhole trên đĩa; khi đã vào đúng vị trí thì cắt/bẻ bỏ phần chốt bị thò ra.
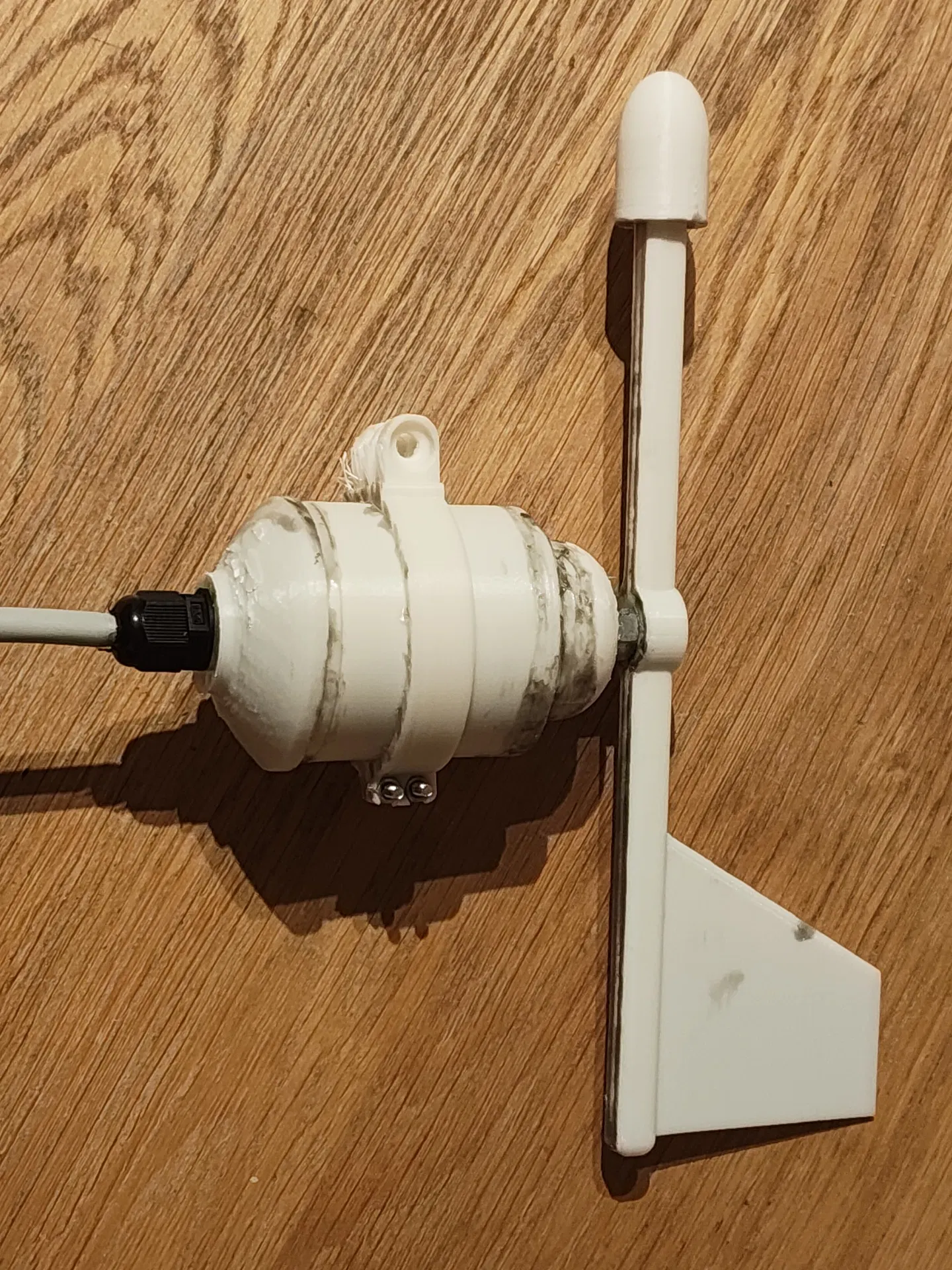
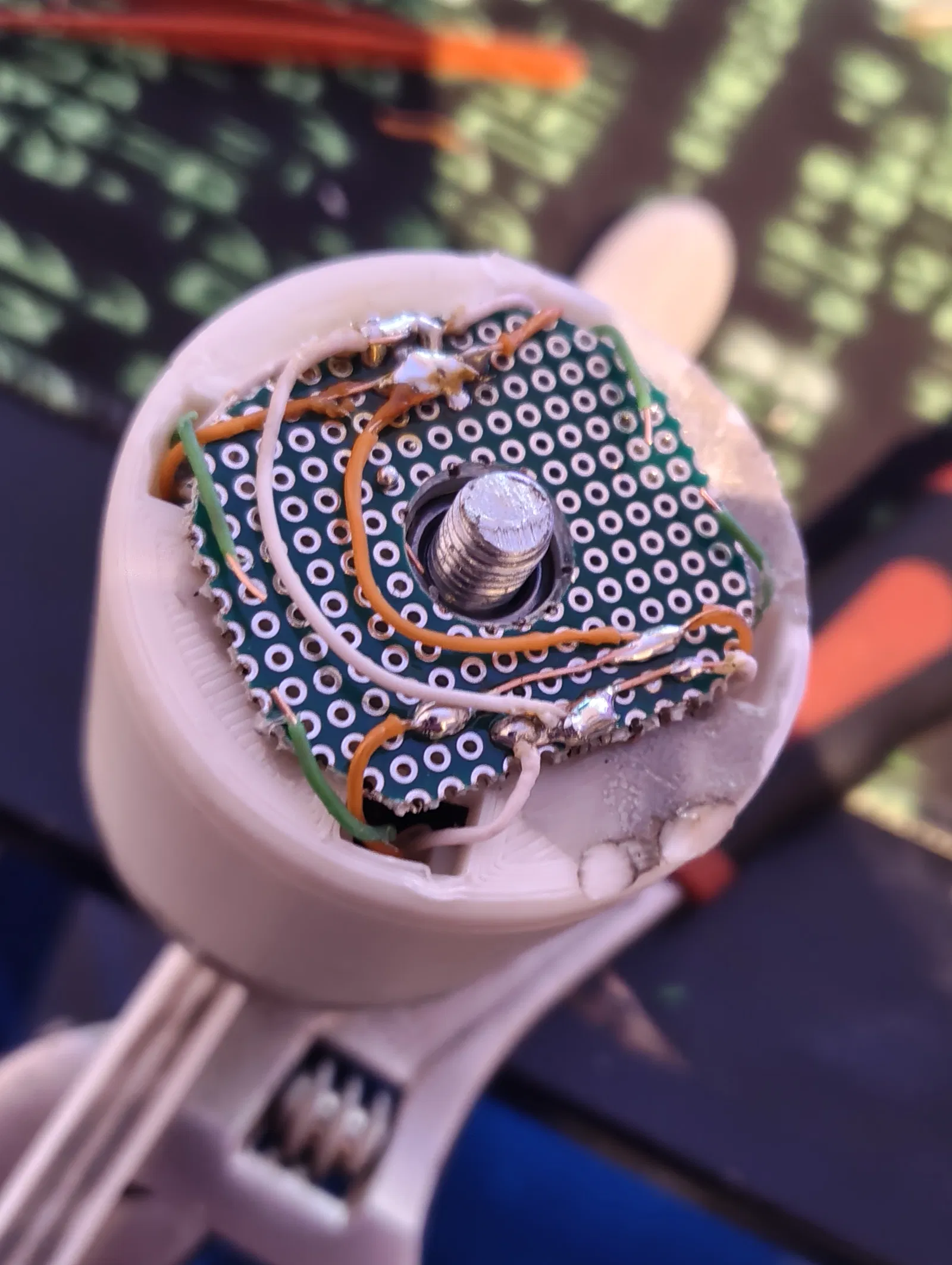
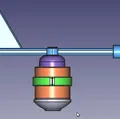
Một PCB nhỏ được gắn ở phần dưới của cánh gió để dễ đi dây trong lúc test và nạp chương trình (lưu ý: chất lượng hàn chỉ mang tính minh hoạ). Dây được luồn qua nắp dưới, và trong dome có lắp đầu siết cáp PG7 (PG7 cable gland) để chống tuột dây.
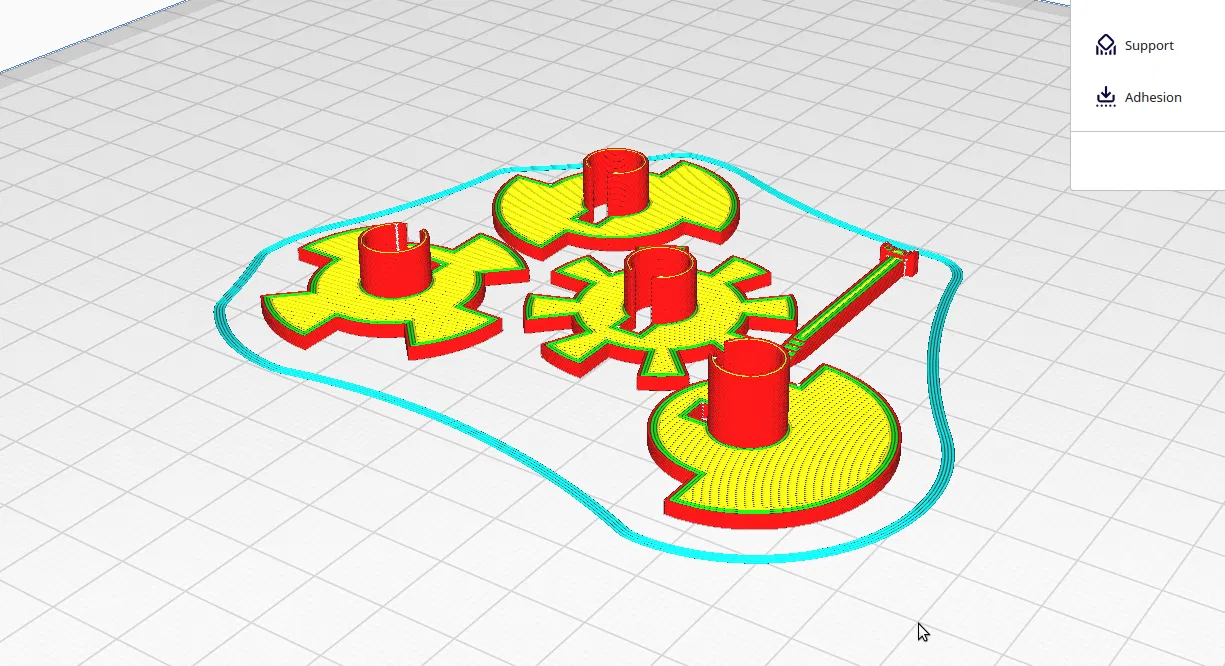
Các chi tiết in 3D
-
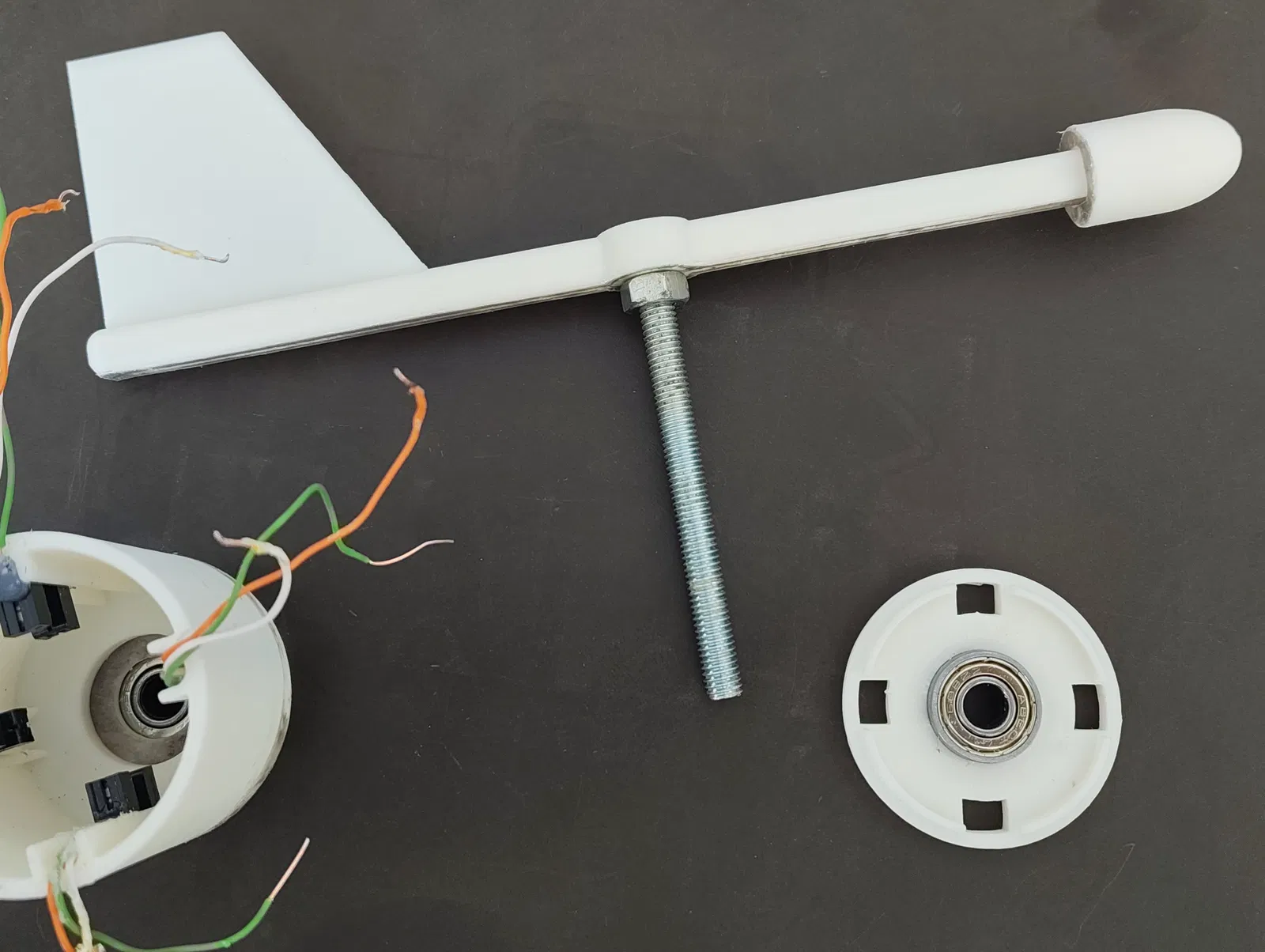
BearingEndCap – Nắp dưới, giữ thêm một vòng bi 608ZZ để trục M8 quay mượt hơn
-
Dome – Chụp che các mối nối điện giữa cảm biến và dây đi ra ngoài; có ren 12.5 × 1.27 mm cho đầu siết cáp PG7
-
BearingCap – Chụp giữ vòng bi 608ZZ phía trên ép sát vào cụm vỏ vòng bi
-
Housing_Bearing – Giá đỡ vòng bi phía trên và nắp bảo vệ
-
Spacer – Chỉ cần nếu độ dày ê-cu khác nhau
-
EncoderKey – Chốt căn chỉnh cho các đĩa encoder
-
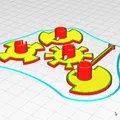
Encoder_diskA – Mã hoá π (180°)
-
Encoder_diskB – Mã hoá π/2 (90°)
-
Encoder_diskC – Mã hoá π/4 (45°)
-
Encoder_diskD – Mã hoá π/8 (22,5°)
-
Sens_housing – Vỏ ngoài và kết cấu gá lắp cho các cảm biến quang
-
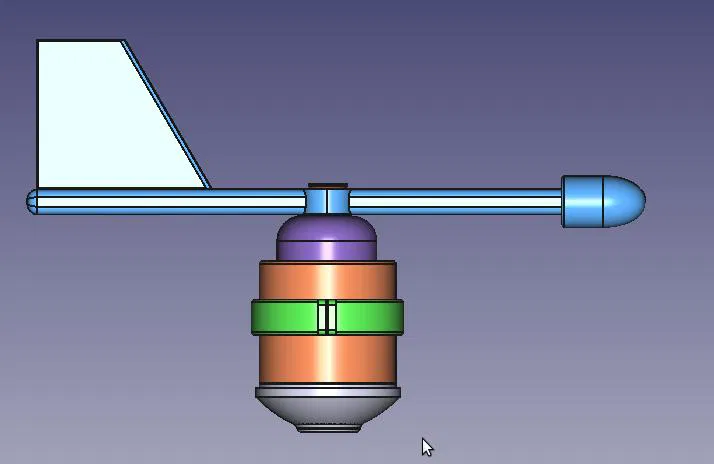
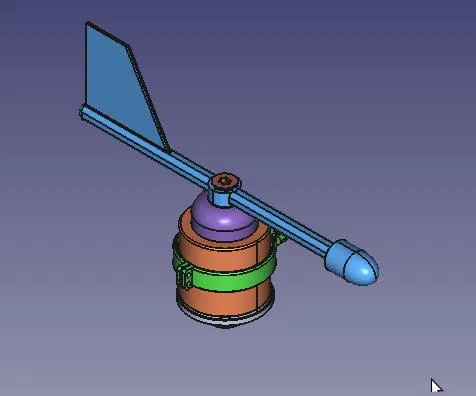
WindVane – Thân chính của cánh gió
-
WindVane_Tip – Đầu tip khí động học để cánh gió tự canh hướng tốt hơn
-
Clamp_mount – Kẹp gắn, tương thích với hệ ngàm gắn camera tiêu chuẩn
-
-
Vật liệu
-
Đĩa encoder và chốt căn chỉnh: Black PLA
-
Tất cả phần còn lại: White ABS
Thông số in
-
Layer height: 0,2 mm
-
Nozzle diameter: 0,4 mm
-
-
Phần cứng (Hardware)
-
Bu lông lục giác M8 × 100 mm hoặc ty ren
-
Nhiều ê-cu M8
-
2 × vòng bi 608ZZ
-
-
Điện tử
-
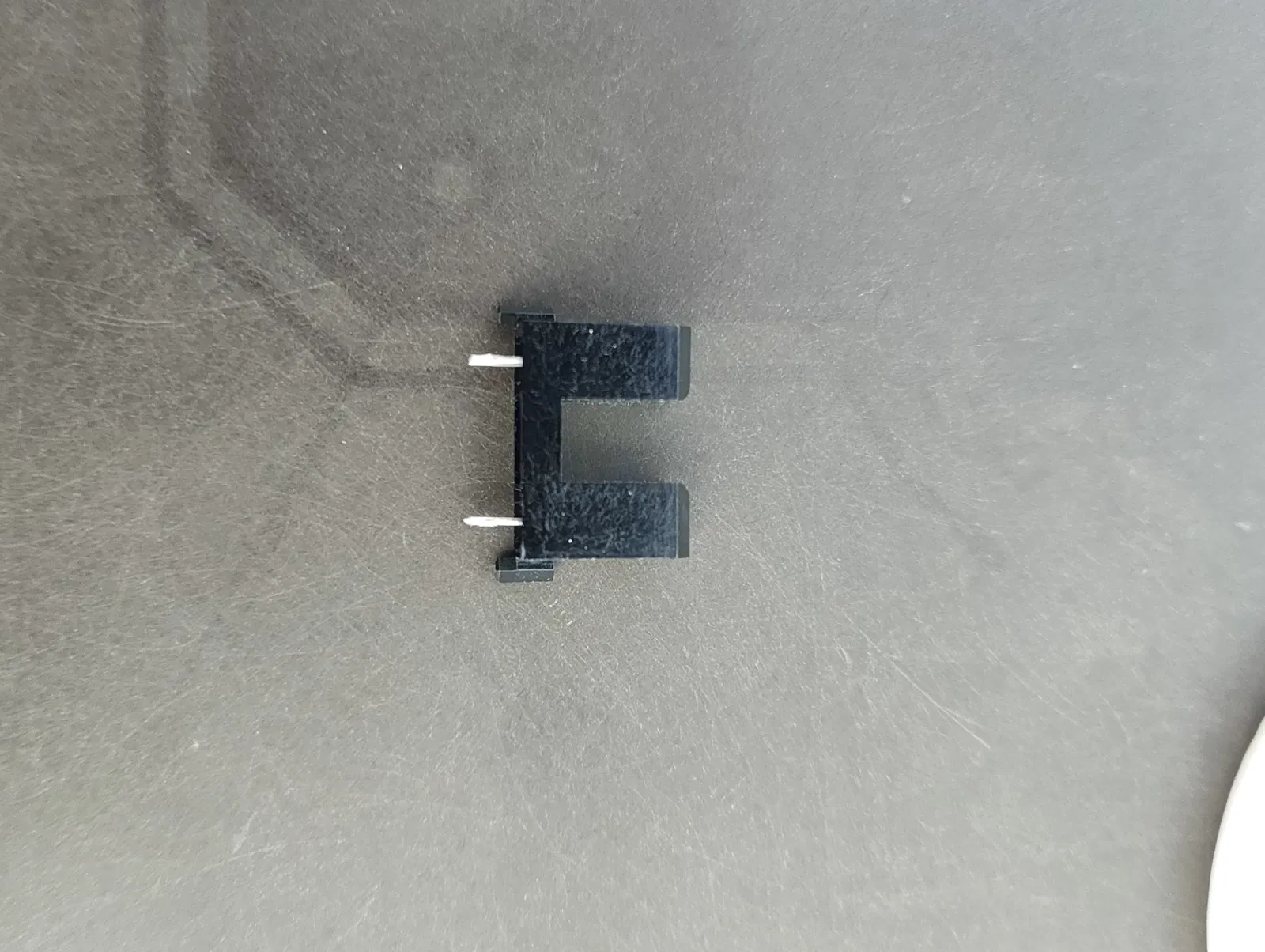
4 × fork-type optical couplers (ví dụ EE-SX1041; kích thước khe yêu cầu: 14 mm × 6 mm)
-
4 × điện trở 220 Ω
-
Dây điện tuỳ nhu cầu
-
-
Mã Arduino
Mã nguồn Arduino sẽ được công bố khi đạt yêu cầu về chất lượng và tài liệu hướng dẫn.
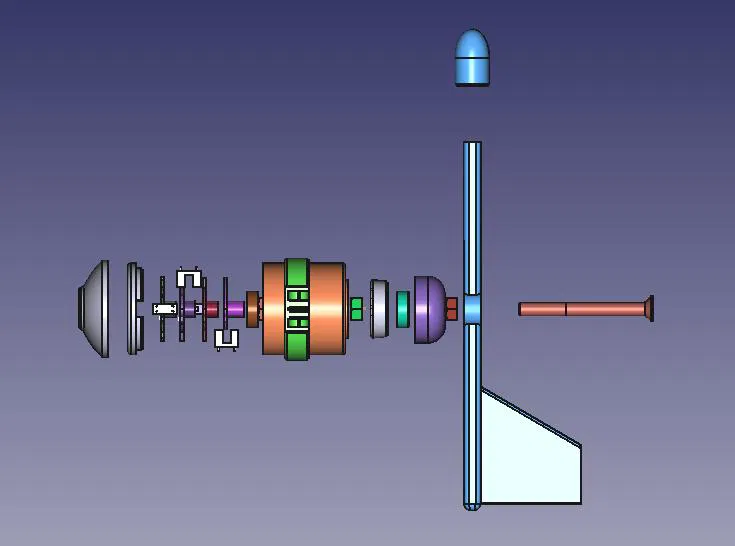
Lắp ráp
-
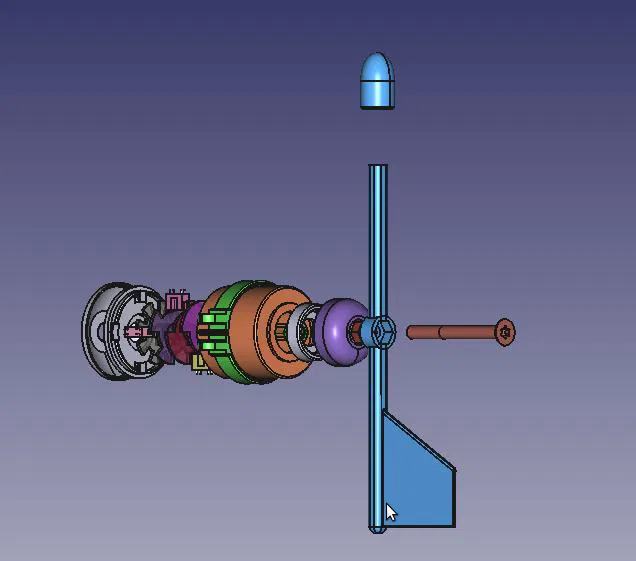
Lắp wind vane vào bu lông M8 và canh lỗ mở phía trên trùng với đầu bu lông.
-
Thêm ê-cu lục giác M8 và siết sát vào cánh gió để cố định vị trí (cần thì siết hãm đối nhau).
-
Lắp ê-cu lục giác M8 thứ hai để làm spacer.
-
Gắn cụm housing vòng bi phía trên (kèm vòng bi) lên trục.
-
Lắp bearing cap để giữ vòng bi nằm trong housing.
-
Thêm một ê-cu lục giác M8 nữa để kẹp cụm cánh gió vào vòng bi.
-
Gắn sensor housing. Cố định cụm housing vòng bi vào sensor housing bằng keo siêu dính (super glue) hoặc acetone.
-
Đi dây cho các optical couplers (sơ đồ sẽ được cung cấp ở bản cập nhật sau).
-
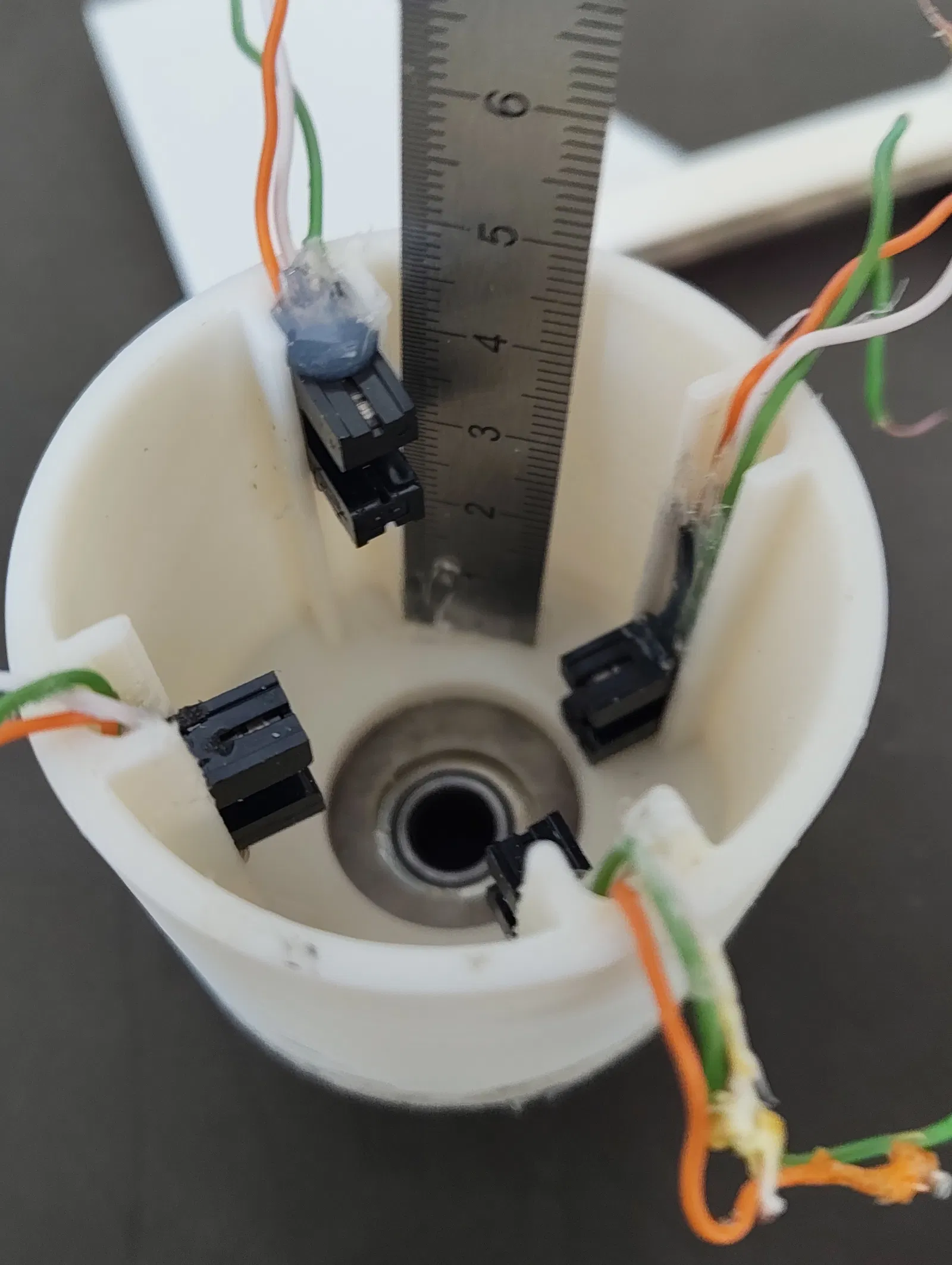
Cố định các optical couplers bên trong sensor housing bằng keo nến (hot glue). Vị trí theo chiều dọc phải chỉnh theo chiều cao của đĩa encoder.
Bước này cần canh chỉnh kỹ và là phần quan trọng nhất khi lắp. -
Khi cả bốn cảm biến và các đĩa encoder đã lắp đúng, luồn dây qua lower bearing end cap.
-
Lắp vòng bi dưới và bấm khớp để đóng sensor housing lại.
-
Nối cảm biến với dây nguồn/đường tín hiệu, hoặc dùng PCB nhỏ như trong hình tham chiếu (có thể sẽ thiết kế PCB chuyên cho ESP ở bản sau).
-
Đậy cụm lại bằng dome, cố định bằng super glue hoặc acetone.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!