Mars Rover: Perseverance (Articulated) – Mô hình rover Perseverance khớp cử động

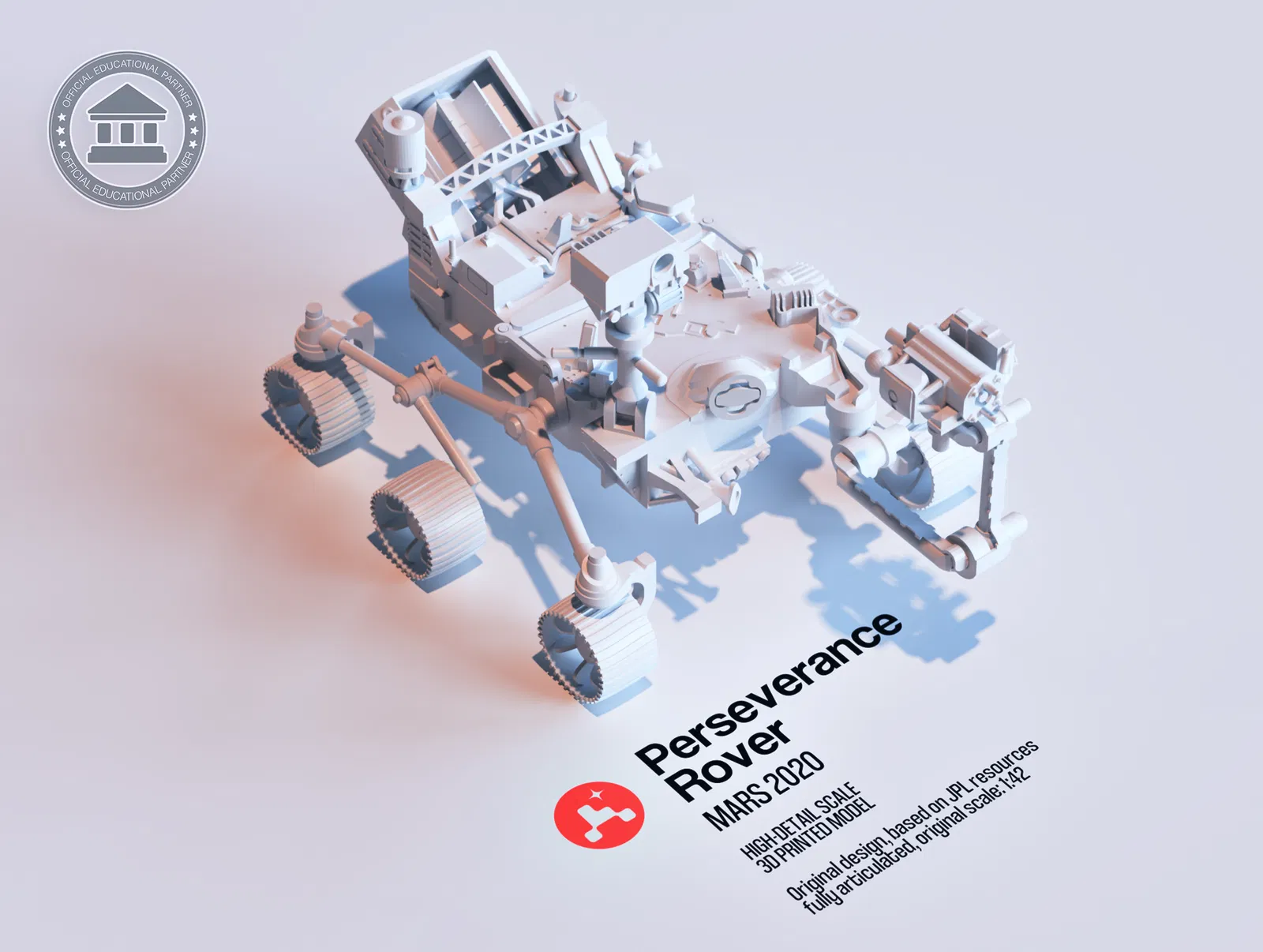
Mô hình Mars Rover Perseverance tỉ lệ chuẩn 1:42, chi tiết cao và khớp cử động đầy đủ. Dễ lắp kiểu click/friction fit, có rocker-bogie suspension, camera mast, arm 5 trục và bộ test dung sai trước khi in.











Mô tả
Perseverance - Rover Mars 2020
Fully Articulated | High-Detail | Scale-Accurate (1:42)
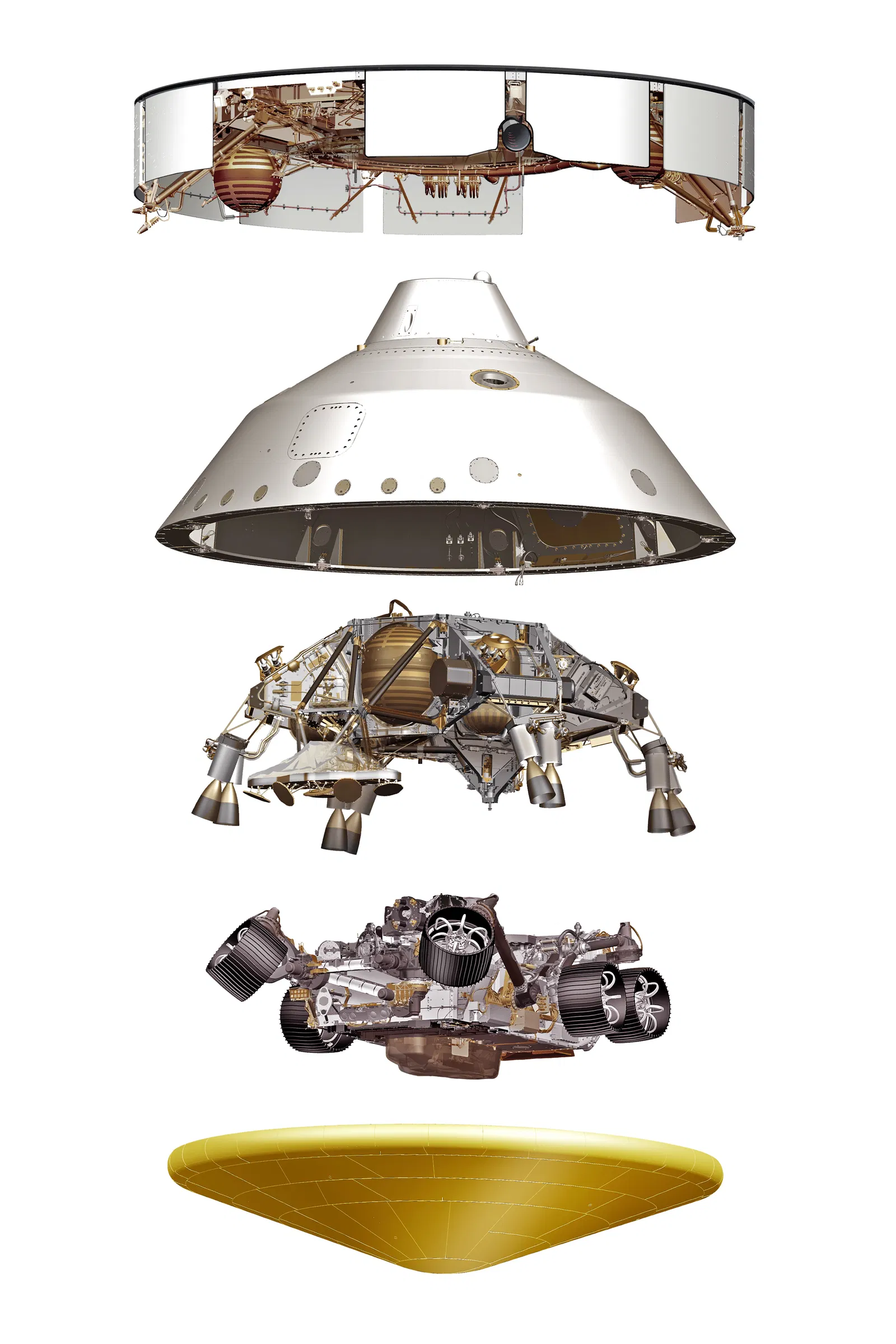
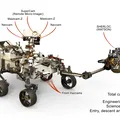
Mars 2020 là một sứ mệnh của NASA, bao gồm rover Perseverance, chiếc trực thăng robot cỡ nhỏ hiện đã ngừng hoạt động , cùng các hệ thống đưa xuống bề mặt liên quan, như một phần của Chương trình Thám hiểm Sao Hỏa.
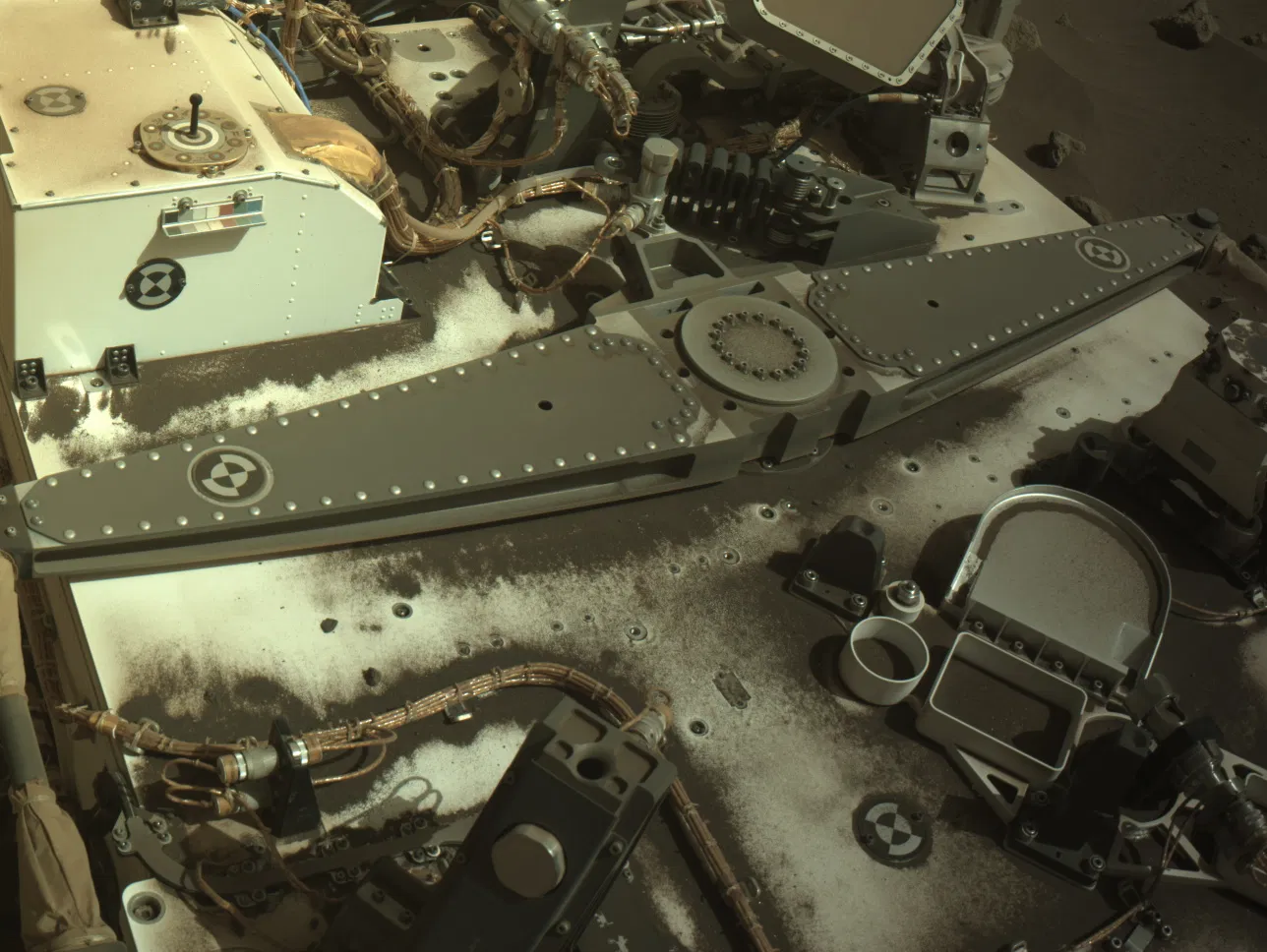
Perseverance đang nghiên cứu một môi trường cổ đại trên Sao Hỏa có liên quan đến thiên văn sinh học, tìm hiểu các quá trình địa chất bề mặt và lịch sử của nó; đồng thời đánh giá khả năng từng có môi trường sống trong quá khứ, khả năng từng có sự sống trên Sao Hỏa, và tiềm năng bảo tồn các dấu hiệu sinh học (biosignatures) trong các vật liệu địa chất có thể tiếp cận.
- Wikipedia
Điểm nổi bật
Dễ lắp ráp. Rất hợp để học hỏi. Các khớp dạng click và lắp ma sát (friction fit) giúp mô hình có thể cử động đầy đủ và mượt, với số lượng chi tiết ít hơn bất kỳ mô hình Perseverance tương đương nào khác (trong phạm vi mình biết).
Được dựng hình cực kỳ kỹ từ đầu dựa trên 3D models của NASA, ảnh chụp JPL và tài liệu kỹ thuật, mô hình tái hiện chi tiết đúng với diện mạo của Rover Perseverance trên Sao Hỏa ở thời điểm hiện tại.
Rocker-Bogie Suspension:
Tự cân bằng. Giữ đủ 6 bánh luôn bám mặt đất khi đi qua địa hình gồ ghề.
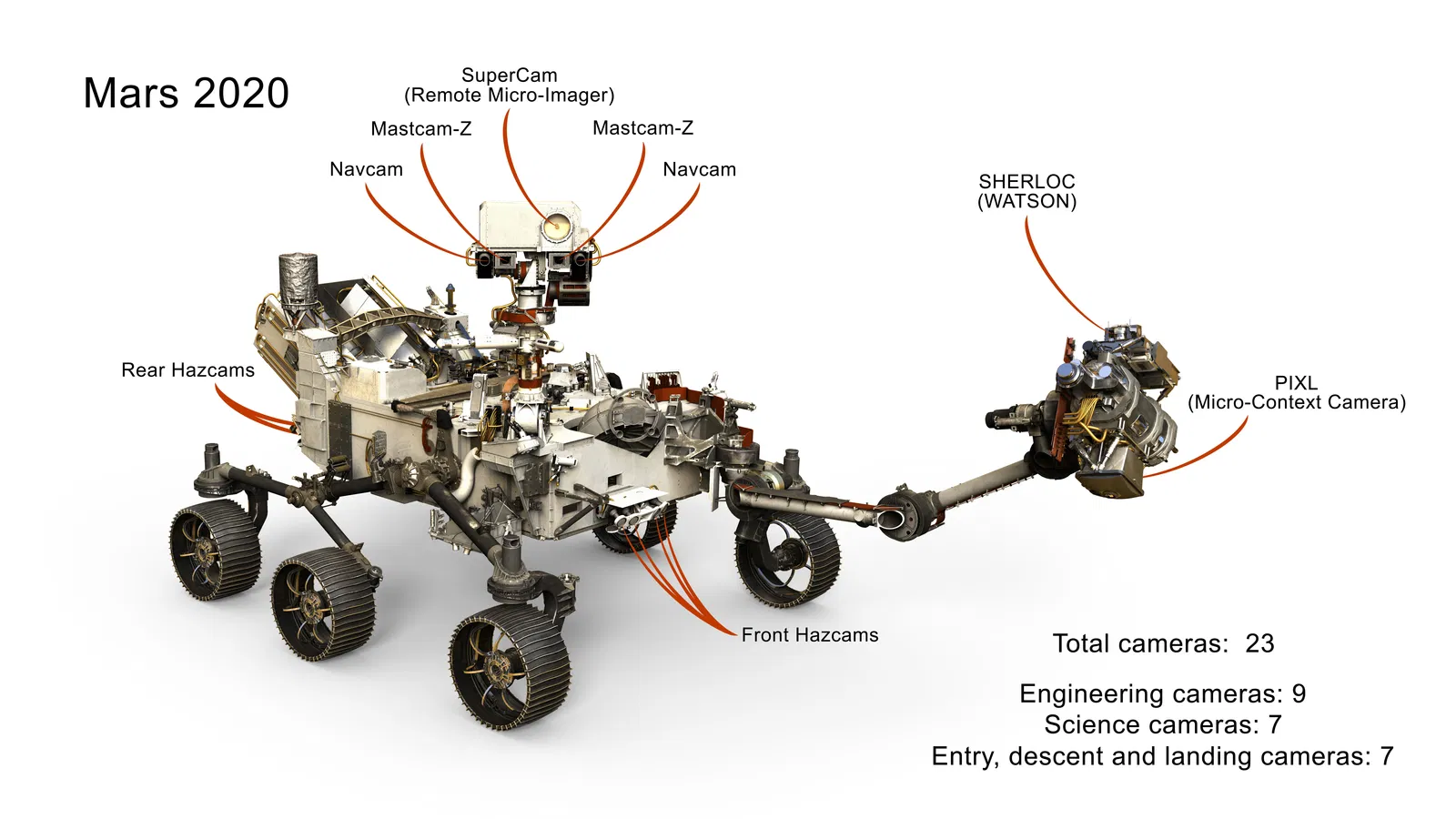
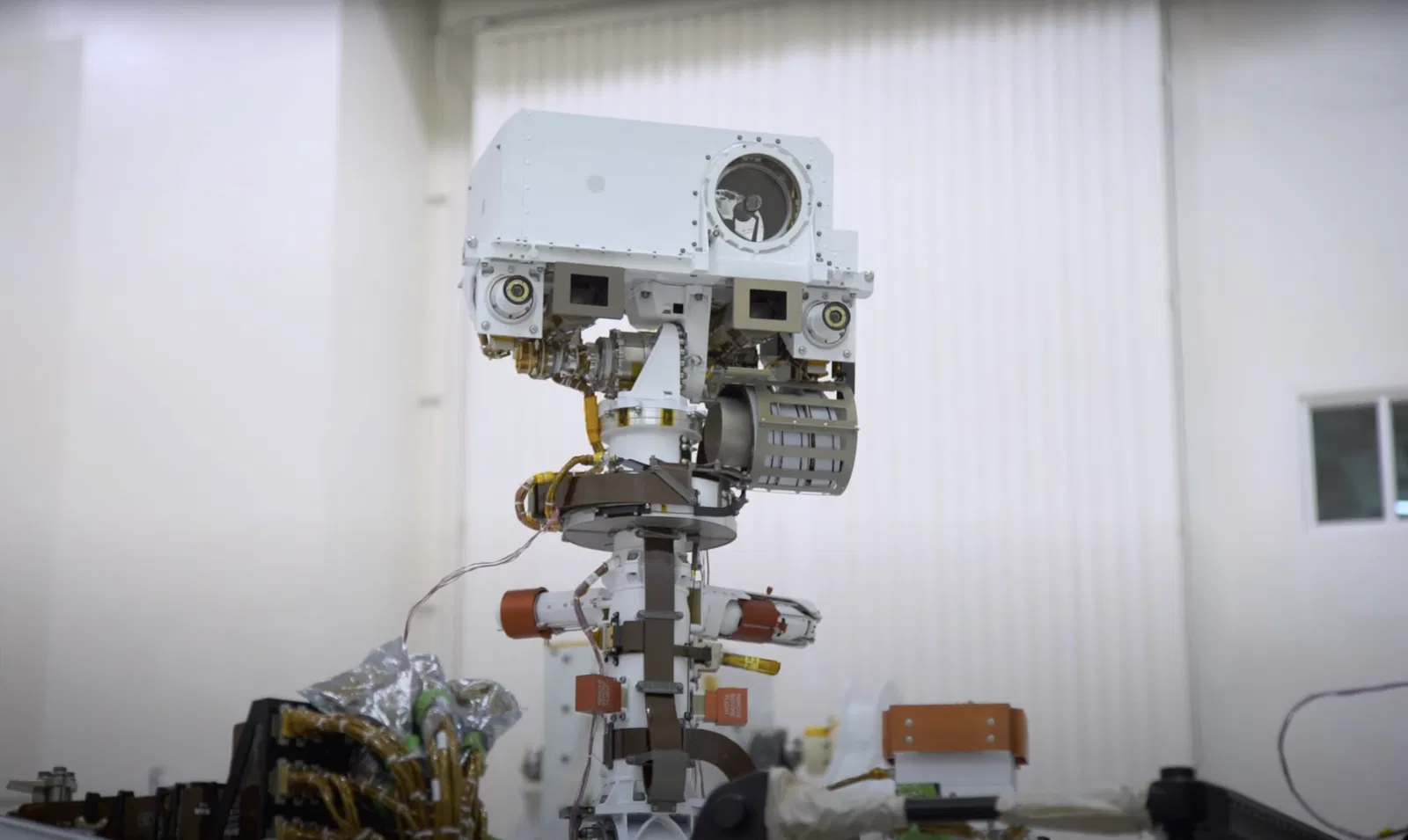
Detailed Camera Mast:
Có mô phỏng SuperCam và Mastcam-Z. 2 trục.
Articulated Arm:
Chuyển động đủ 5 trục, gồm tất cả dụng cụ.
Có đầy đủ các dụng cụ khoa học.
Ghi chú thiết kế: Ở rover thật, thanh vi sai (differential bar) “trôi” tự do và được cân bằng tự nhiên nhờ trọng lượng 1 tấn của rover. Ở tỉ lệ 1:42 này, trọng lượng nhẹ và ma sát của nhựa có thể lấn át sự cân bằng đó. Tác giả đã thiết kế một “centering spring” (ở vị trí khóa khi phóng thật), giúp mô hình tự cân bằng và tự cân chỉnh khi đặt trên bàn hoặc khi vượt chướng ngại.
ReadMe! trước khi in ⬇
Print Settings
Khuyến nghị cho tỉ lệ (gốc) 1:42, FDM
Đã test trên Core One bản stock với preset chiều cao lớp 0.10mm, 0.15mm và 0.20mm.Material: PLA+
Nozzle: 0.4mm hoặc nhỏ hơn
Layer Height: 0.15mm hoặc nhỏ hơn
Infill: 15%, Gyroid
Supports: Everywhere, Overhang-threshold: 12°, X/Y-distance: 1.5mm
Hướng dẫn dung sai (Tolerance)
Để test dung sai nhanh, hãy in 22_Tolerance_Test trước.
Các chi tiết test nên lắp vào dễ, nhưng không được tự rơi ra chỉ vì trọng lực.
Danh sách chi tiết
-
00_Body -
01_Arm 1 -
02_Arm 2 -
03_Arm 3 -
04_Arm 4 -
05_Arm 5 -
06_Antenna Hub -
07_Antenna -
08_Back bar -
09_MastCam -
10_MastCam Mast -
11_RTG
Drivetrain
-
12_Differential Bar -
13_Differential Linkage [2x] -
14_Spring -
15_Drivetrain Lower Left [brim] -
16_Drivetrain Lower Right [brim] -
17_Drivetrain Upper Left -
18_Drivetrain Upper Right -
19_Wheel Leg [4x] -
20_Wheel Swivel Hub Bottom [4x] -
21_Wheel [6x]
Hướng dẫn
-
Lắp theo kiểu “từ ngoài vô trong”. Trước tiên lắp Science Arm, cụm drivetrain bên phải và bên trái, và MastCam; sau đó gắn các cụm này lên thân Rover rồi nối phần còn lại.
-
Các phần của Arm có độ ma sát cao hơn những khớp nối khác.
-
Tất cả các khớp xoay còn lại nên click vào và xoay mượt với ma sát thấp.

Giáo dục & Nguồn tham khảo
Đối tác

Đối tác bảo tàng chính thức: Jan Paagman Sterrenwacht (Asten, Netherlands).
Doanh số của mô hình này tại cửa hàng của đài quan sát sẽ hỗ trợ trực tiếp
cơ sở vật chất phục vụ giáo dục và các chương trình thiên văn của họ.
Bạn là bảo tàng, nhà chiếu hình vũ trụ (planetarium), hoặc đơn vị giáo dục muốn sử dụng hoặc bán mô hình này?
Liên hệ tại manu[at]enso.berlin.
Build the Fleet:
________________________________
Dựa trên dữ liệu public domain từ NASA/JPL-Caltech. Dựng mẫu bởi Emanuel Bender, Enso Berlin.
Giấy phép

File mô hình


























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!