Chân đế chống rung mềm đơn giản cho Ender 3 v3 SE/KE (TPU)

Mô hình chân đế TPU đơn giản cho Ender 3 v3 SE/KE, được thiết kế để giảm rung động và cộng hưởng. Giúp tăng gia tốc tối đa và ổn định máy in trên các bề mặt không lý tưởng. Dễ dàng lắp đặt, chỉ cần trượt lên chân đế gốc.


Mô tả
Kinh nghiệm kỹ thuật:
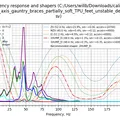
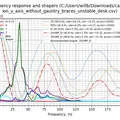
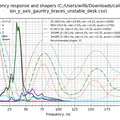
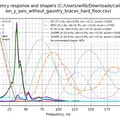
Input Shaping trên Klipper có thể được tinh chỉnh bằng G-Sensor. Khi sử dụng Nebula Pad FW đã được root, quá trình tinh chỉnh sẽ tạo ra tệp .csv đo lường rung động và đề xuất các cài đặt shaper + gia tốc tối đa dưới các cài đặt này. Và vì Nebula Pad đã root có Klipper bị lỗi, tôi không thể tạo đồ thị trực tiếp trên đó, nên nhờ có https://github.com/theycallmek/Klipper-Input-Shaping-Assistant, mà tôi có thể tạo chúng trên PC. Hy vọng chúng không bị thiếu, dựa trên một vài báo cáo nội tuyến trong Fluidd mà tôi đã đối chiếu, trông có vẻ phù hợp.
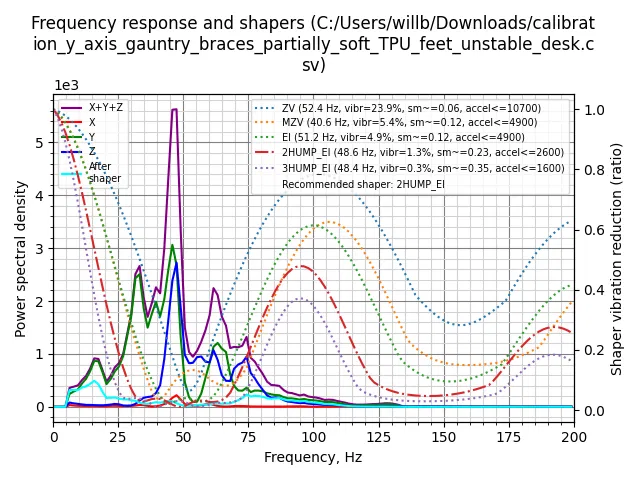
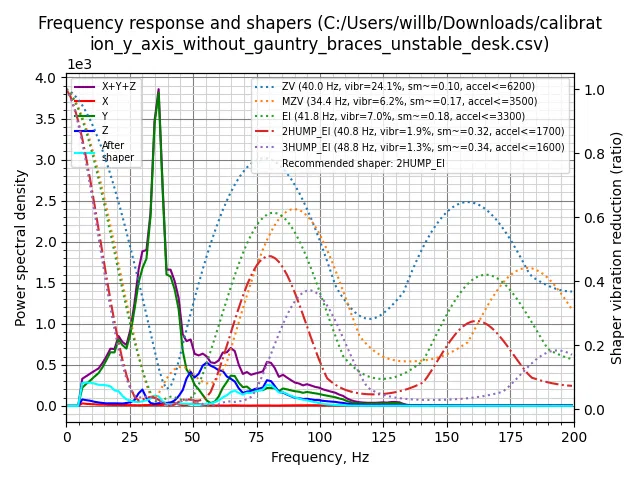
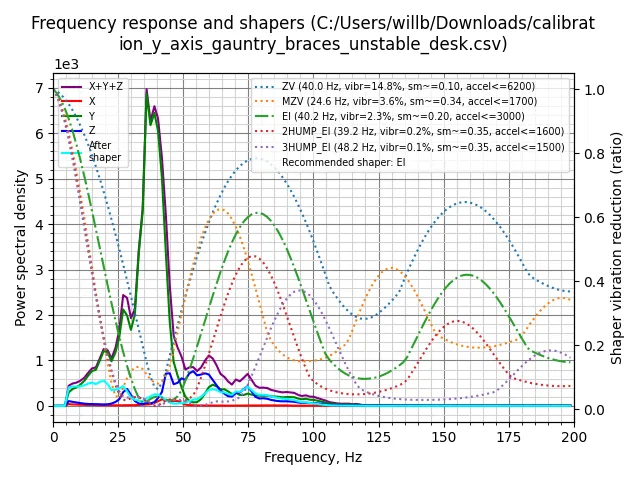
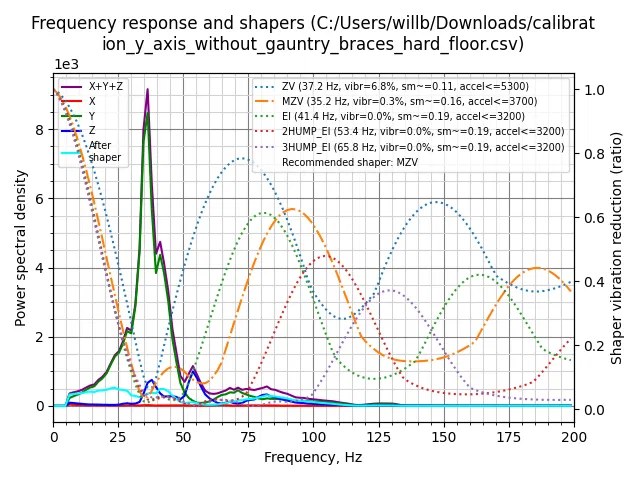
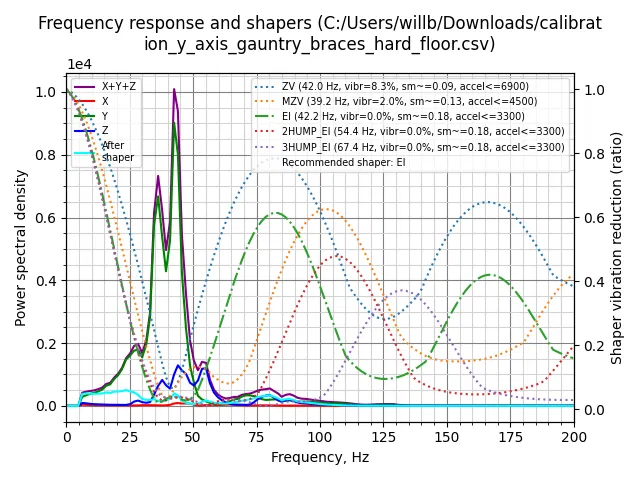
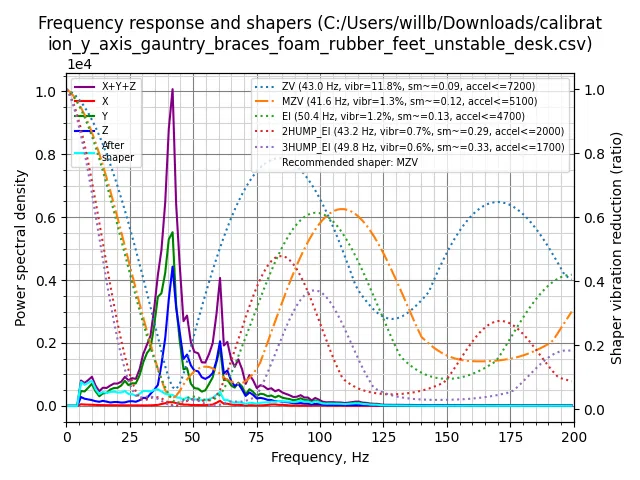
Tôi đã sử dụng điều này để hiệu chỉnh lại Input Shaping sau khi lắp các thanh gia cố khung cho Ender3 v3 SE/KE, và phát hiện ra rằng cấu trúc cứng hơn thực sự có thể ảnh hưởng xấu đến Input Shaping và giảm gia tốc tối đa nếu máy in được đặt trên bề mặt không ổn định và truyền rung động của nó. Vì vậy, tôi đã thử nghiệm và phát hiện ra rằng trên các chân đế mềm làm từ cao su xốp dày, rung động được triệt tiêu tốt hơn (mặc dù lớn hơn!) và gia tốc tối đa tăng lên đáng kể, và điều đó đã thôi thúc tôi thiết kế các chân đế TPU. Sau khi tinh chỉnh cấu trúc, kết quả thậm chí trên chiếc bàn không ổn định mà tôi có cũng rất đáng khích lệ.
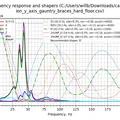
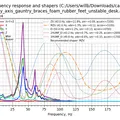
Tôi đính kèm các đồ thị của các lần chạy cho những ai quan tâm, vui lòng chú ý đến thang đo trục Y trên đồ thị! Đôi khi là 1e3 (1.000), đôi khi là 1e4 (10.000), cần đối chiếu đúng cách. Tôi hy vọng tên tệp tự giải thích. "Partial" trong lần chạy với thiết kế hiện tại là vì chỉ các chân đế phía sau, bên dưới khung đỡ và phía máy in nặng hơn, mới có thiết kế này - các chân đế phía trước được sử dụng từ một thiết kế cứng hơn, kém hiệu quả hơn, nhưng chúng không quan trọng lắm vì tôi đã so sánh chúng với chân đế xốp phía trước và nhận được kết quả gần như tương tự. Tôi thậm chí còn không bận tâm in chúng với thiết kế mới nhất, để tránh lãng phí không cần thiết.
Thiết kế thực tế:
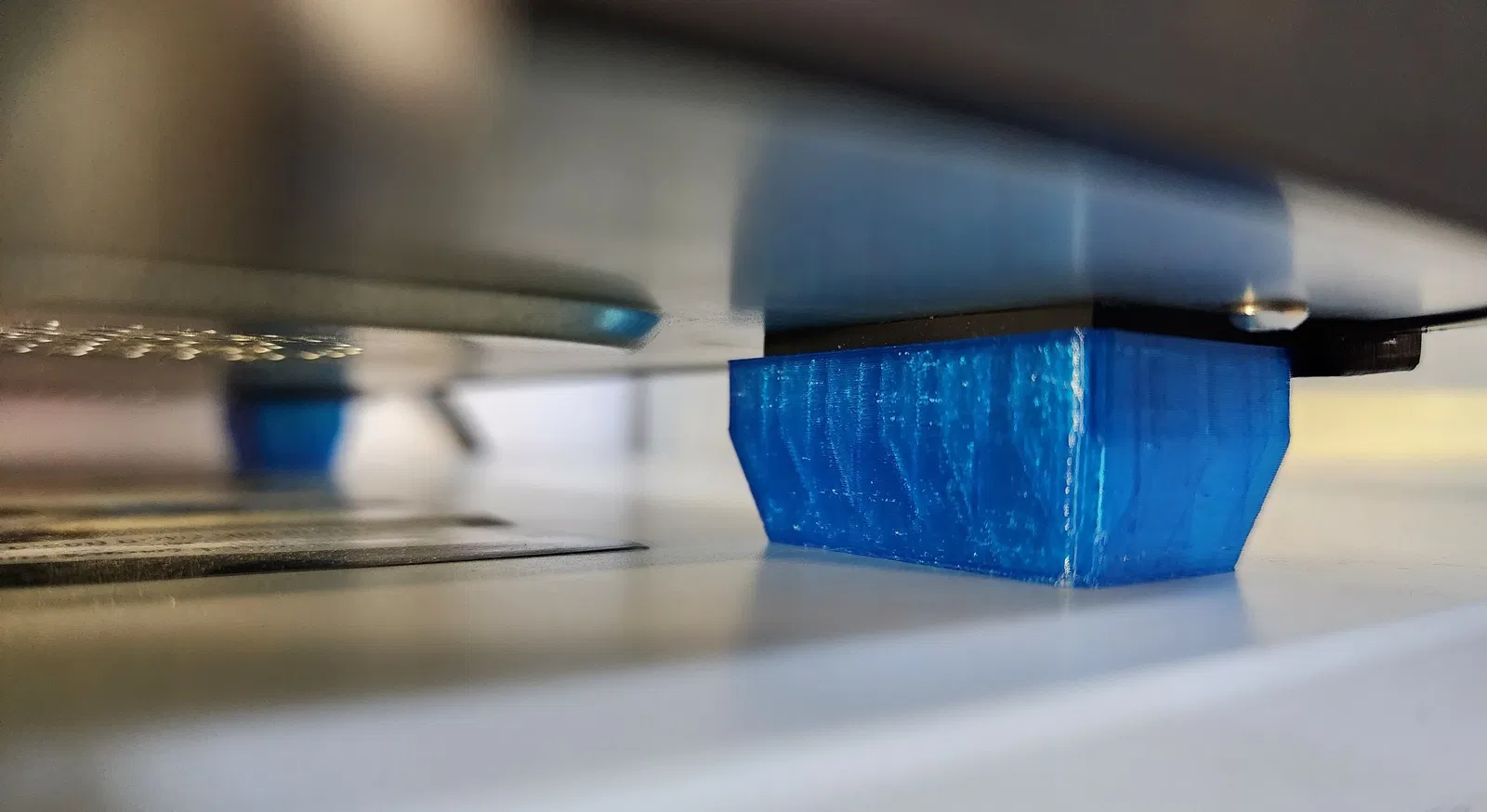
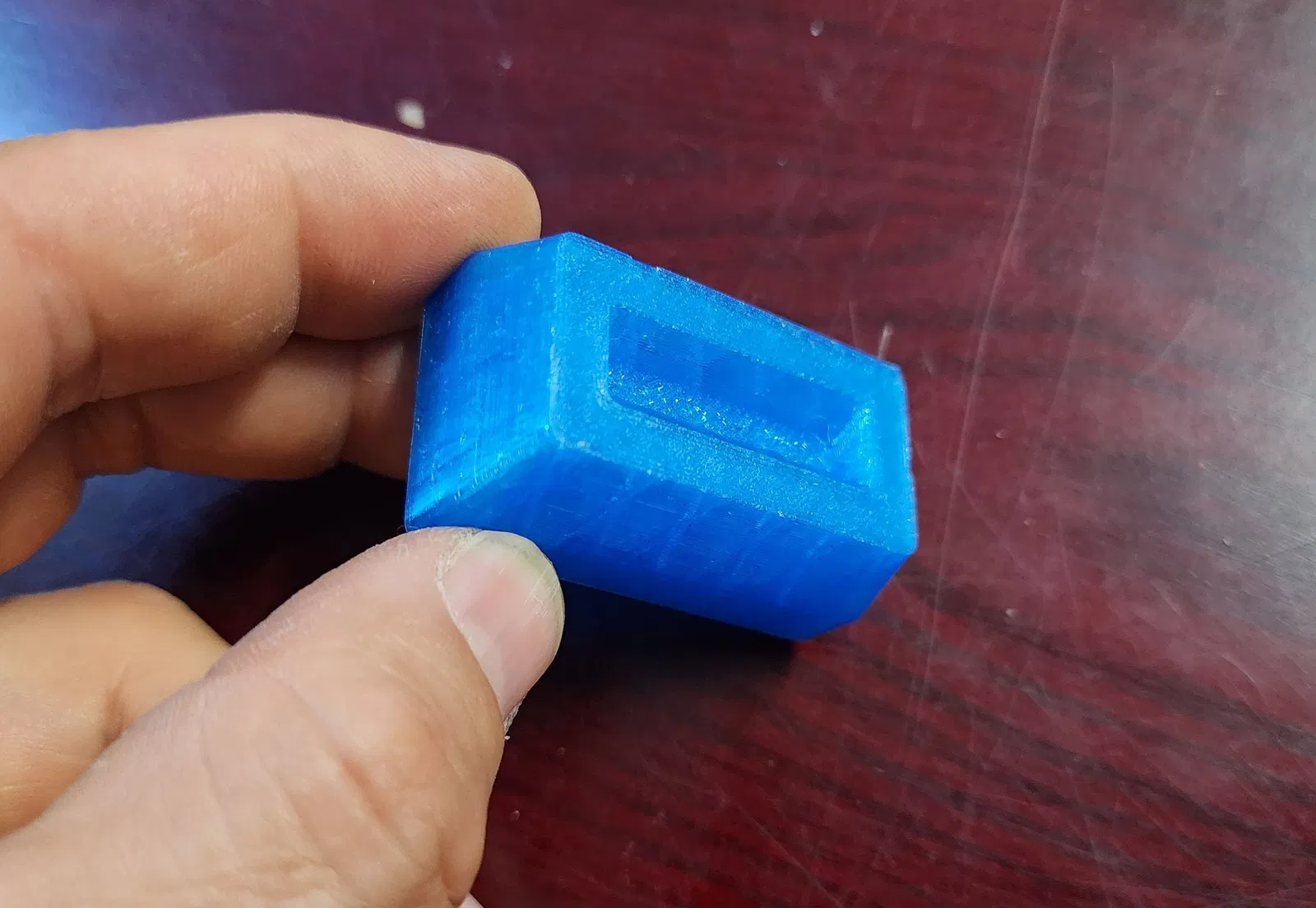
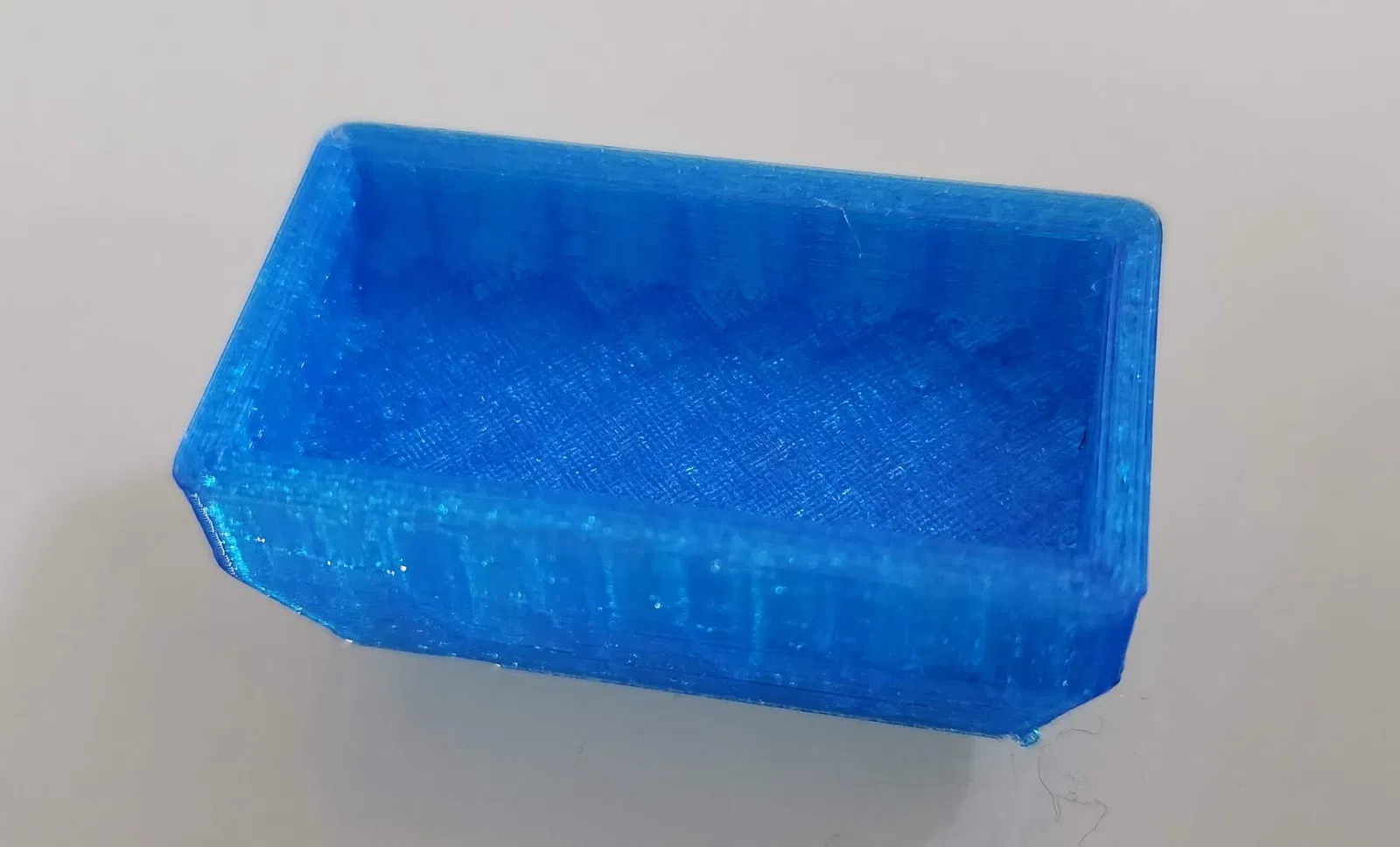
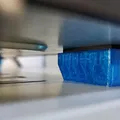
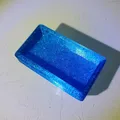
Vì chân đế cao su xốp nhanh chóng bị nén và mất khả năng giảm xóc, tôi muốn tải xuống một số chân đế TPU đơn giản, nhưng hầu như chỉ tìm thấy một vài mẫu, và không mẫu nào phù hợp với nhu cầu của tôi (tôi không muốn một mô hình lớn, ngược lại, muốn thứ gì đó mỏng và tương đối mềm). Vì vậy, tôi quyết định tạo ra thứ gì đó rất đơn giản, và đây là nó, sau khi thử nghiệm 3 biến thể để tìm ra độ bền cấu trúc và độ điền đầy cho phép nó chịu được trọng lượng của máy in mà vẫn đủ linh hoạt.
Việc lắp đặt đơn giản như trượt chúng lên trên chân đế cao su thông thường. Chúng nên giữ chắc chắn.
Không thể thêm G-Code, vì tôi có các macro tùy chỉnh trong đó, chạy Nebula Pad + Klipper đã root. Tôi có thể thử thay thế các macro bằng lệnh init thông thường và đặt ở đây, nếu có nhu cầu, nhưng tôi đề xuất sử dụng slicer.
Cài đặt Slicer ( !!! QUAN TRỌNG !!! )
- Chất liệu: TPU 95A
- Đối với TPU mềm hơn, bạn sẽ cần tăng mật độ điền đầy
- Độ phân giải: 0.2, đầu phun tiêu chuẩn 0.4mm (2 lớp vỏ, 4 lớp trên/dưới)
- Loại điền đầy: Lines
- Mật độ điền đầy: 8%
- Supports/Raft/Brim: không
- Nhiệt độ: bất kỳ nhiệt độ nào bạn in TPU, đối với tôi là đầu phun 225 độ C và môi trường xung quanh ở bed.
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!