Chân Robot Kiểu Strider cho XRP

Mang robot XRP của bạn đi dạo với bộ chân cơ khí này. Bộ chân hoàn toàn bằng cơ khí, có thể bước qua chướng ngại vật và xoay. Chỉ cần các bộ phận in và ốc M3, không cần thêm động cơ hay linh kiện điện tử. Lắp ráp dễ dàng với hướng dẫn minh họa.














Mô tả
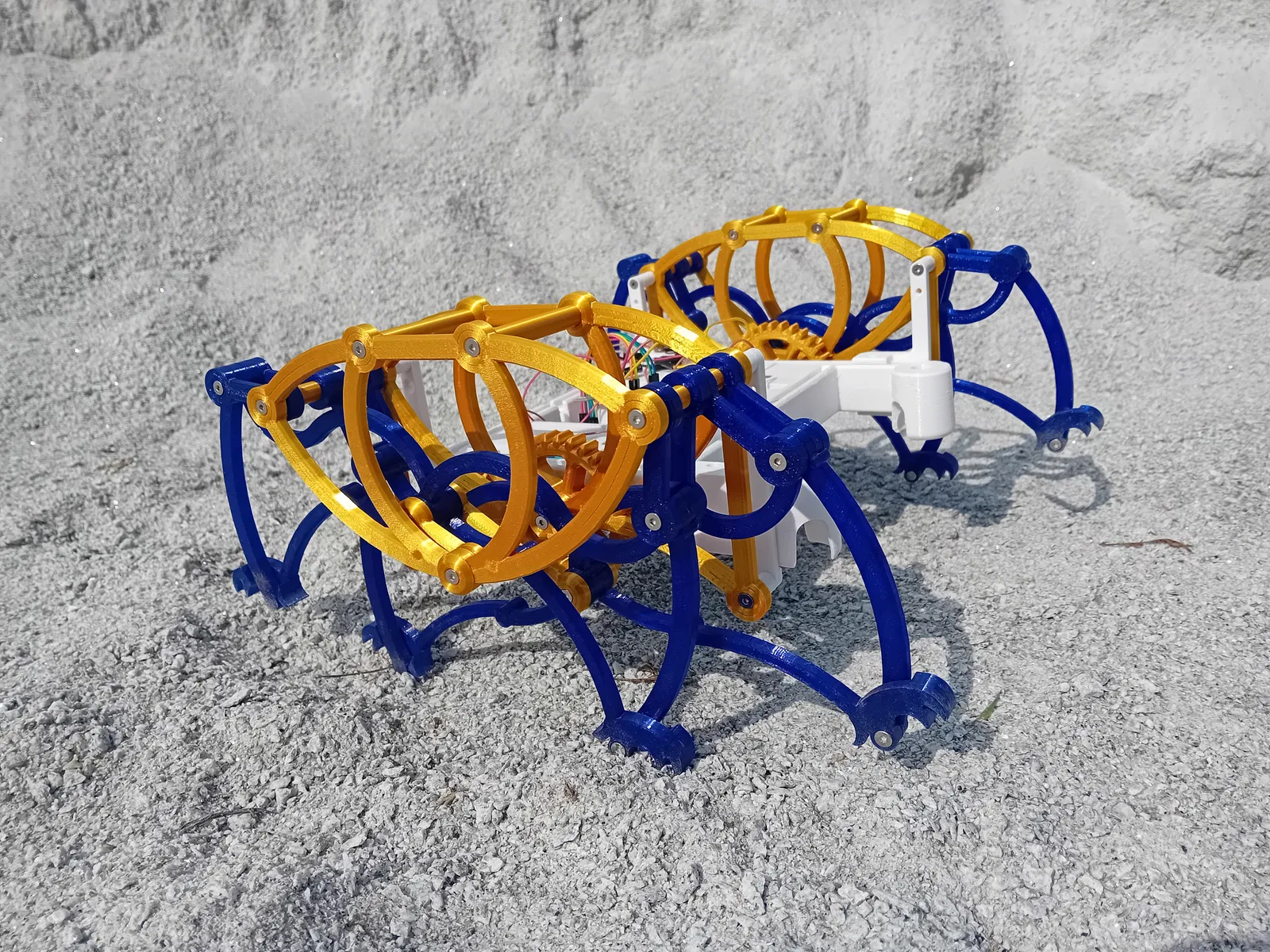
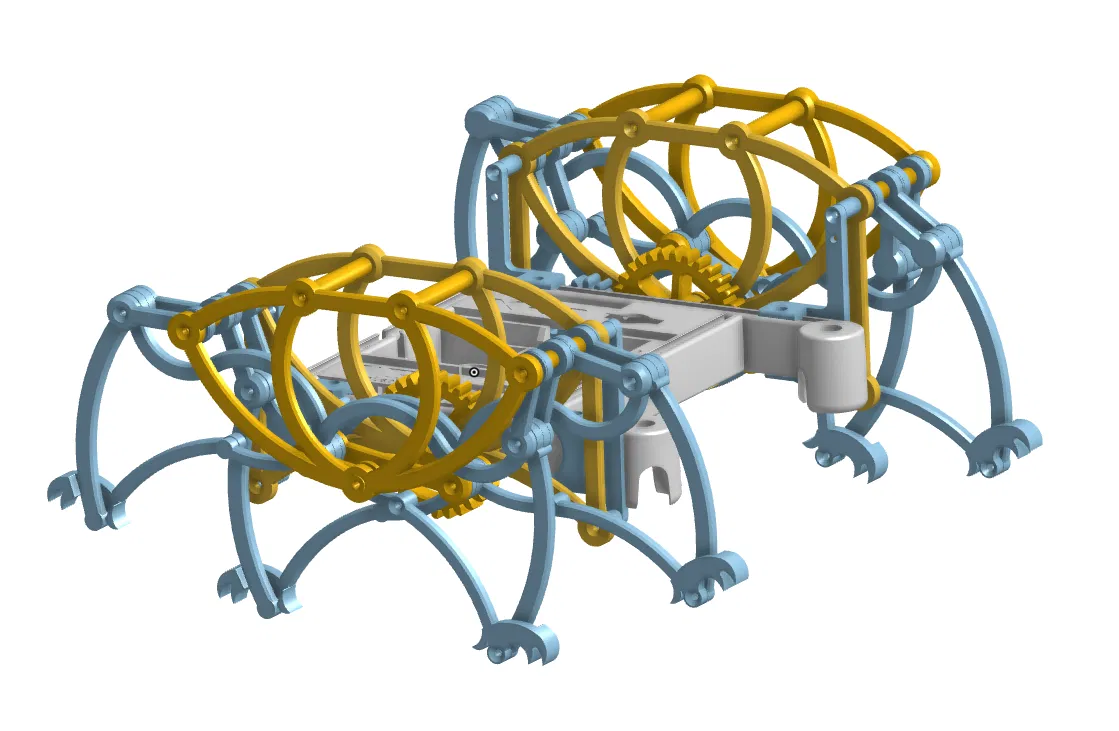
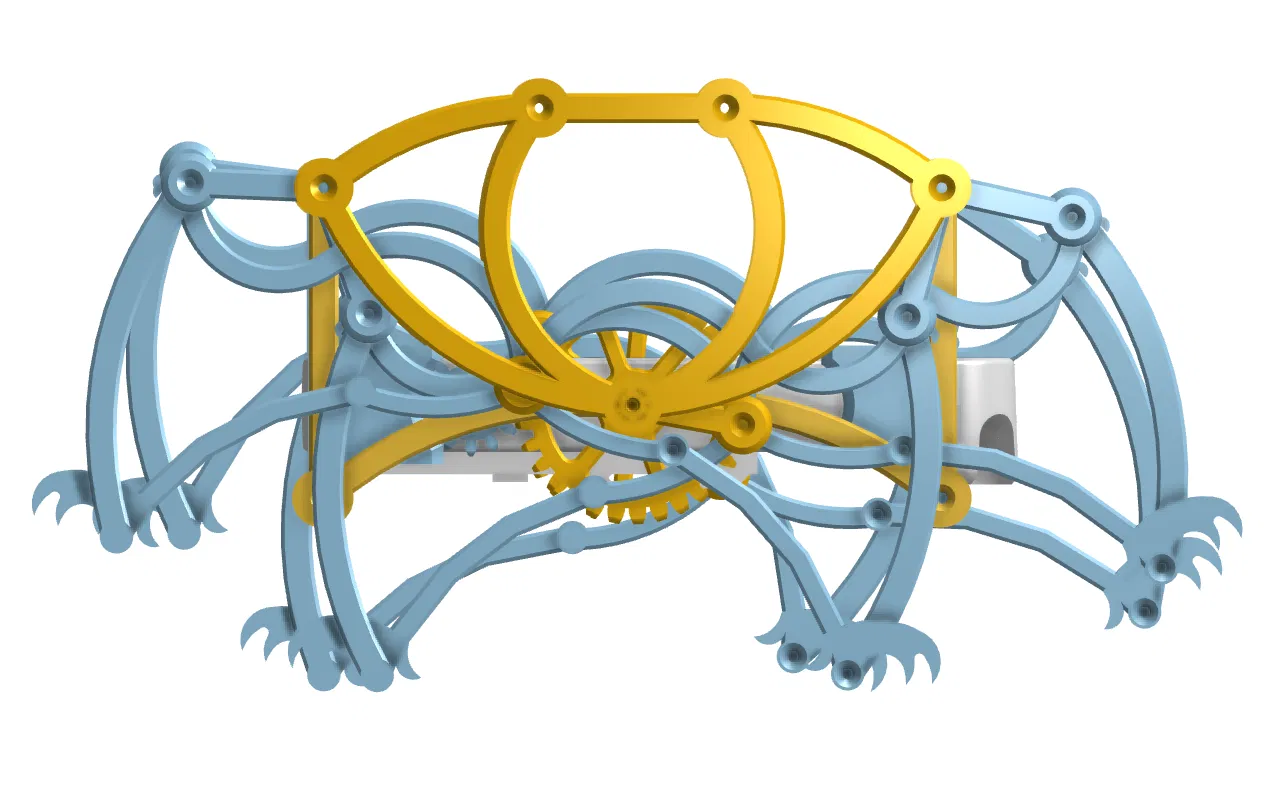
Mẫu này là một bộ chân in được cho robot XRP. Chuyển động đi bộ hoàn toàn bằng cơ khí và được điều khiển bởi động cơ của bộ kit XRP. Chân có khả năng bước qua chướng ngại vật và robot cũng có thể xoay.
Không cần thêm động cơ hay linh kiện điện tử nào, chỉ cần các bộ phận in và ốc M3. Lắp ráp rất đơn giản với hướng dẫn minh họa, không cần dán.
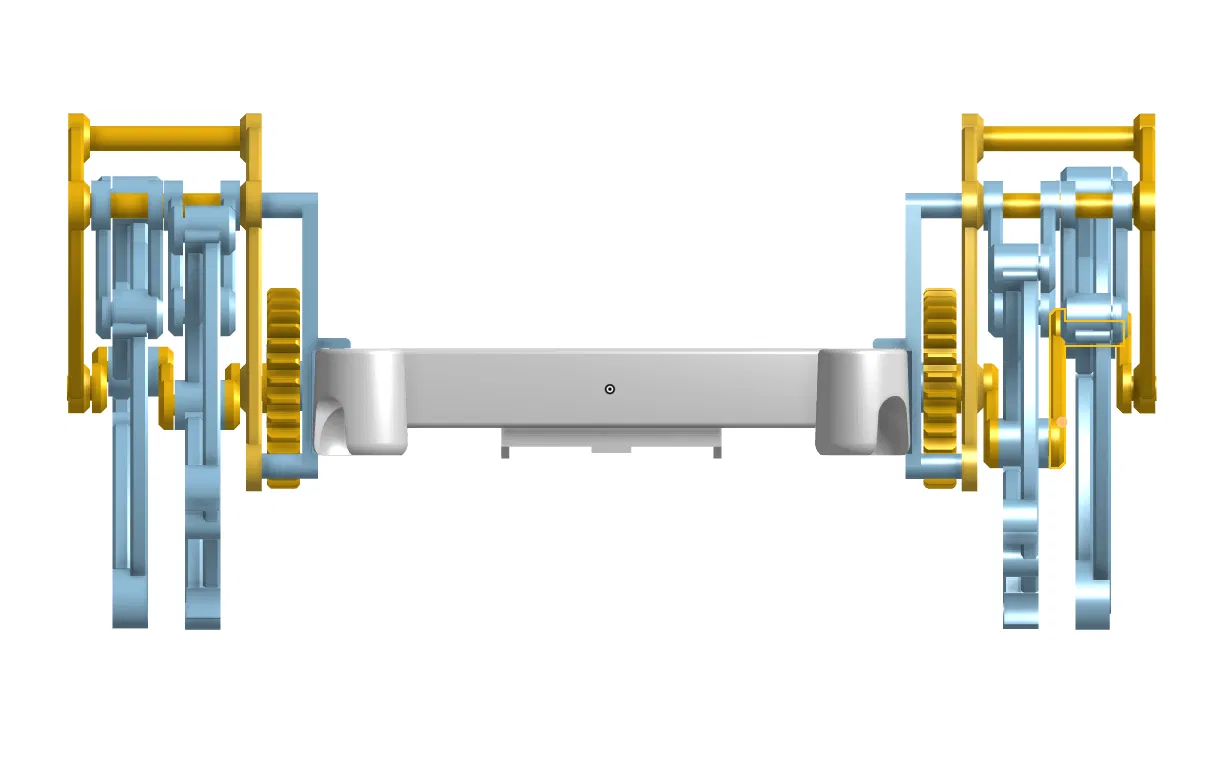
Chân dựa trên cơ cấu liên kết Strider được mô tả trên trang web DIY Walkers tuyệt vời: https://www.diywalkers.com/strider-linkage-plans.html. Mẫu này mang đến một vài cải tiến, trong đó chính là thanh b2-b5 hình chữ S, cho phép thiết kế nhỏ gọn hơn.
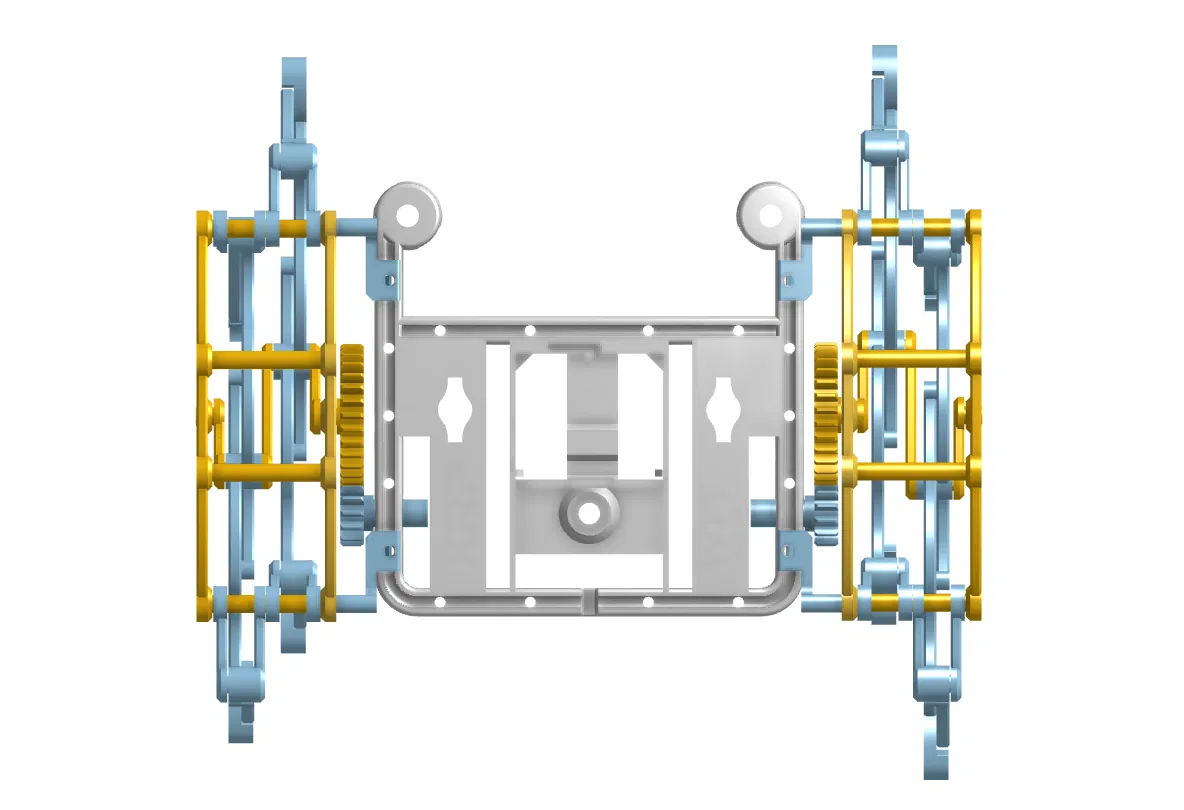
Một bộ phận chân có hai biến thể: b4_with_claws và b4_no_toes. Biến thể có móng vuốt tốt hơn cho bề mặt cứng, và phiên bản không có ngón chân tốt hơn cho bãi cỏ. Hãy chọn một trong hai, nhưng đừng kết hợp cả hai.
Các bánh răng cũng có hai biến thể: XRP nên sử dụng biến thể mô-men xoắn cao, những người dùng động cơ DC với bộ giảm tốc kim loại 1:90 có thể sử dụng cả hai.
Tôi dự định làm một bản remix của mẫu này với khung giữa có kiểu dáng thẩm mỹ hơn giống với chân, với động cơ tốt hơn và linh hoạt hơn về CPU và trình điều khiển động cơ. Nếu bạn quan tâm, hãy nhấn like mẫu này và theo dõi tôi ;)
In ấn
Việc in ấn nên tập trung vào việc giữ cho robot nhẹ. Tôi khuyên dùng:
- 2 lớp vỏ
- 3-4 lớp, trên và dưới
- 7% mật độ điền
- Chiều cao lớp tiêu chuẩn 0.2mm
Cả PLA và PETG đều đã được thử nghiệm và hoạt động tốt. ASA/ABS thậm chí còn tốt hơn. Nên in thử vài bộ phận trước để kiểm tra dung sai. Các thanh 8mm nên xoay trơn tru trong các lỗ 8mm, và các ốc M3 nên giữ chắc trong các lỗ của chúng.
Lắp ráp
Để việc lắp ráp dễ dàng, tôi đã tạo một hướng dẫn lắp ráp từng bước với hình ảnh. Ngoài các bộ phận in, bạn sẽ cần ốc M3x10mm đầu côn và thanh ren M3. Chi tiết hơn trong hướng dẫn lắp ráp.
Tương thích với bộ kit XRP
Do vấn đề về nguồn cung, tôi không thể có một bộ kit XRP. Nhưng tôi đã cẩn thận thử nghiệm mẫu này với các bộ phận tương thích và so sánh được với những gì có trong bộ kit XRP. Khi có thể, các số đo được lấy từ bảng dữ liệu thay vì từ phần cứng tôi sử dụng. Nếu vẫn có bất kỳ vấn đề tương thích nào, tôi sẽ cung cấp bản sửa lỗi sớm nhất có thể.
Nguyên mẫu đã sử dụng các bộ phận điện tử sau:
- Trình điều khiển động cơ bước L9110 12V/0,8A
- Động cơ DC với hộp số kim loại 1:90 3-9V, trục đơn - Bi-Metal (Tôi tin rằng động cơ sparkfun tốt hơn)
- Arduino Leonardo
- Mô-đun thu hồng ngoại 1838 - 38kHz - Iduino ST1089
- Bộ giữ pin AA 4 viên
Tệp Nguồn
Tất cả các tệp nguồn đều có trên onshape.com, với khả năng xuất ra nhiều định dạng. Liên kết trong hướng dẫn lắp ráp.
Nhật ký thay đổi
- 2024.07.05: Phát hành
Giấy phép

File mô hình























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!