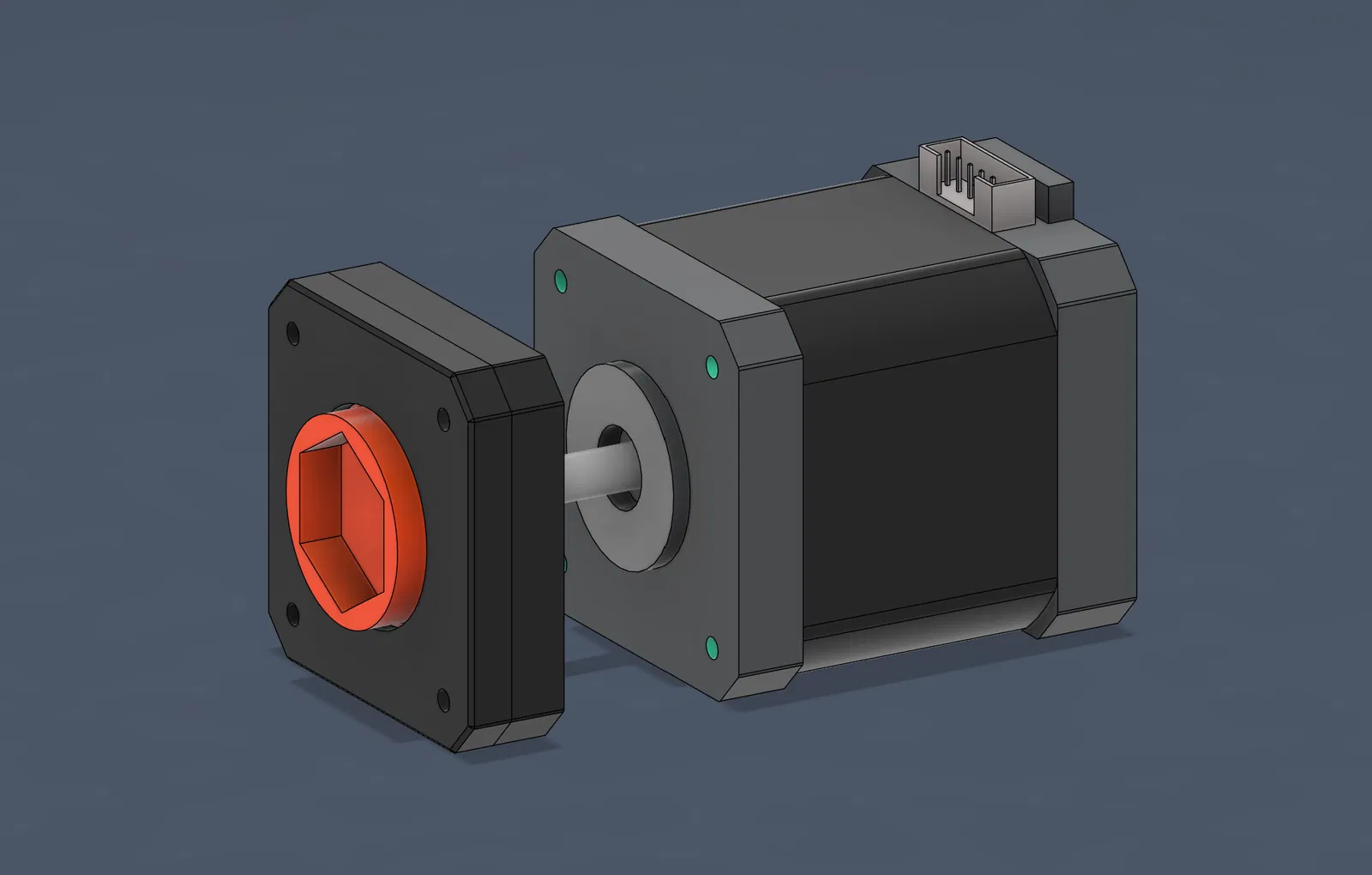
Cơ Cấu Truyền Động Bánh Răng Hành Tinh Cho Động Cơ Bước

Thay thế bánh xe cùi bắp của bạn bằng bộ truyền động "quái vật" này, hoặc làm cho bất cứ thứ gì quay! Giảm tốc 10:1. Thích hợp cho bánh xe, cánh tay robot, bộ phận xoay. Lưu ý chọn vật liệu in thật bền, đặc biệt là "Eccentric Shaft" để tránh gãy vỡ.










Mô tả
Có thể dùng làm bánh xe, bộ phận cho cánh tay robot, bộ phận xoay cho robot XRP, v.v.
Giảm tốc 10:1
Nếu dùng trong robot, nhớ bôi trơn hộp số bằng mỡ lithium hoặc tương đương.
Độ dung sai là 0.25mm - Nếu cơ cấu bị kẹt, hãy kiểm tra bản in xem có vấn đề như "chân voi" (elephants foot) không và in lại.
Vui lòng in các bộ phận, đặc biệt là "Eccentric Shaft", bằng vật liệu bền nhất có thể, nếu không nó sẽ dễ bị gãy dưới tải trọng cao. Chỉ nên dùng PLA cho bộ phận này nếu bản in được dùng để trình diễn không tải. Nếu chỉ có PLA hoặc PETG, hãy in các "pin" nhỏ với tốc độ chậm hơn và nhiệt độ cao hơn. Nếu có thể, hãy sử dụng buồng in có nhiệt độ. (bất cứ điều gì để có các lớp in bền hơn)
Hộp số nên được tách khỏi động cơ một khoảng để tránh bị cong vênh do nhiệt khi hoạt động.
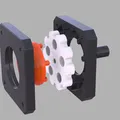
In "Outer Shell" bằng nhựa resin trong suốt để có thể nhìn thấy cơ cấu bên trong.
Khuyến nghị dùng đầu phun 0.2mm
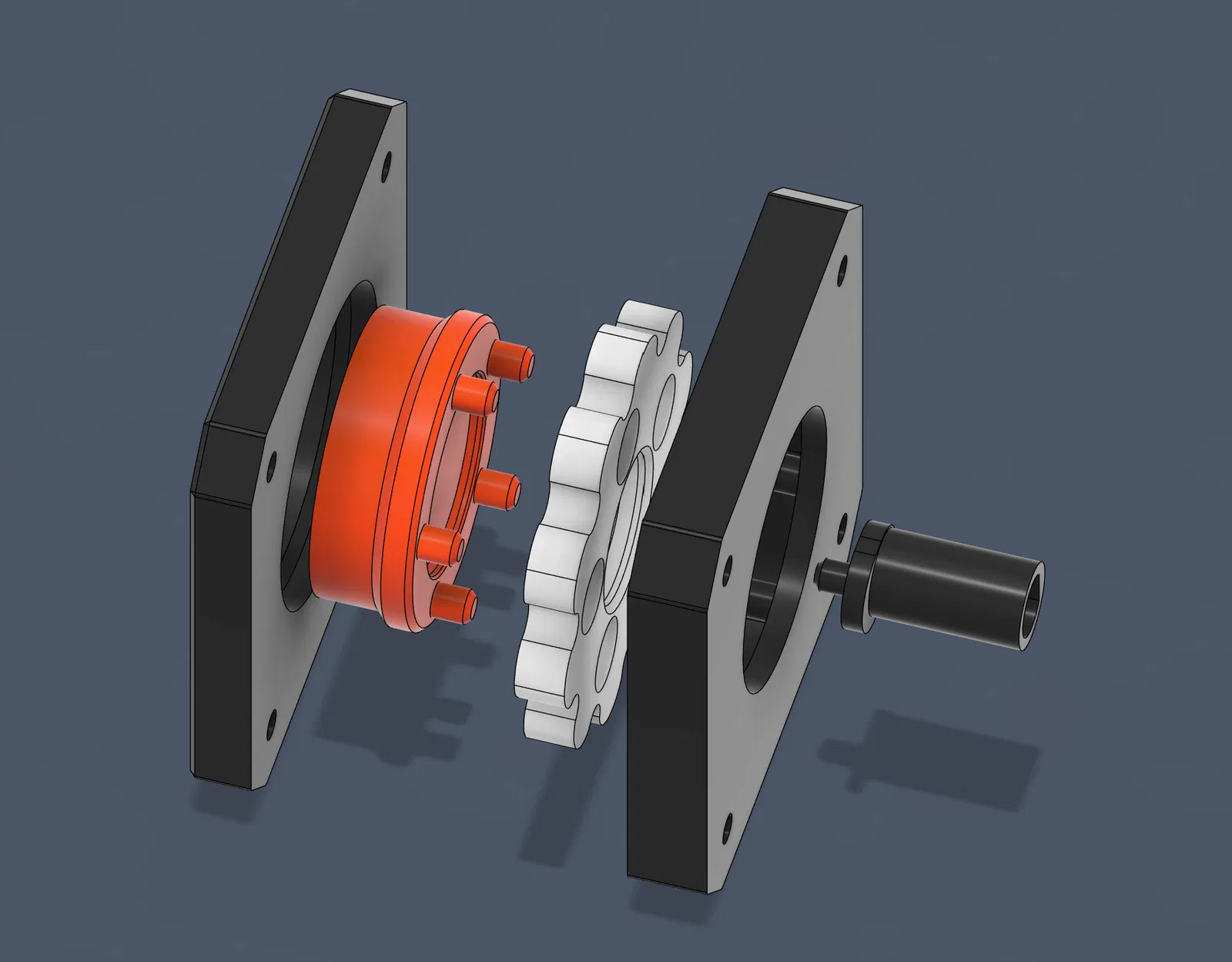
Các file STEP được đính kèm để chỉnh sửa và sử dụng cho robot. Mở "Output Drive Blank" và chỉnh sửa cho bất kỳ trục đầu ra nào.
In: 1x Eccentric Shaft 1x Inner Shell 1x Outer Shell 1x Cycloidal Disk 1x Output Drive
Giấy phép
File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!