Mô Hình Origami Hoa Văn Gấp Được

Mẫu hoa văn origami Yoshimura có thể in 3D, với đối xứng sáu cạnh và hai vòng xoay mở rộng. Hướng dẫn in ấn chi tiết, đề xuất vật liệu PETG hoặc PLA linh hoạt và kỹ thuật in hai lớp đế 0.1mm để đảm bảo độ bền của bản lề.




Mô tả
Tóm tắt
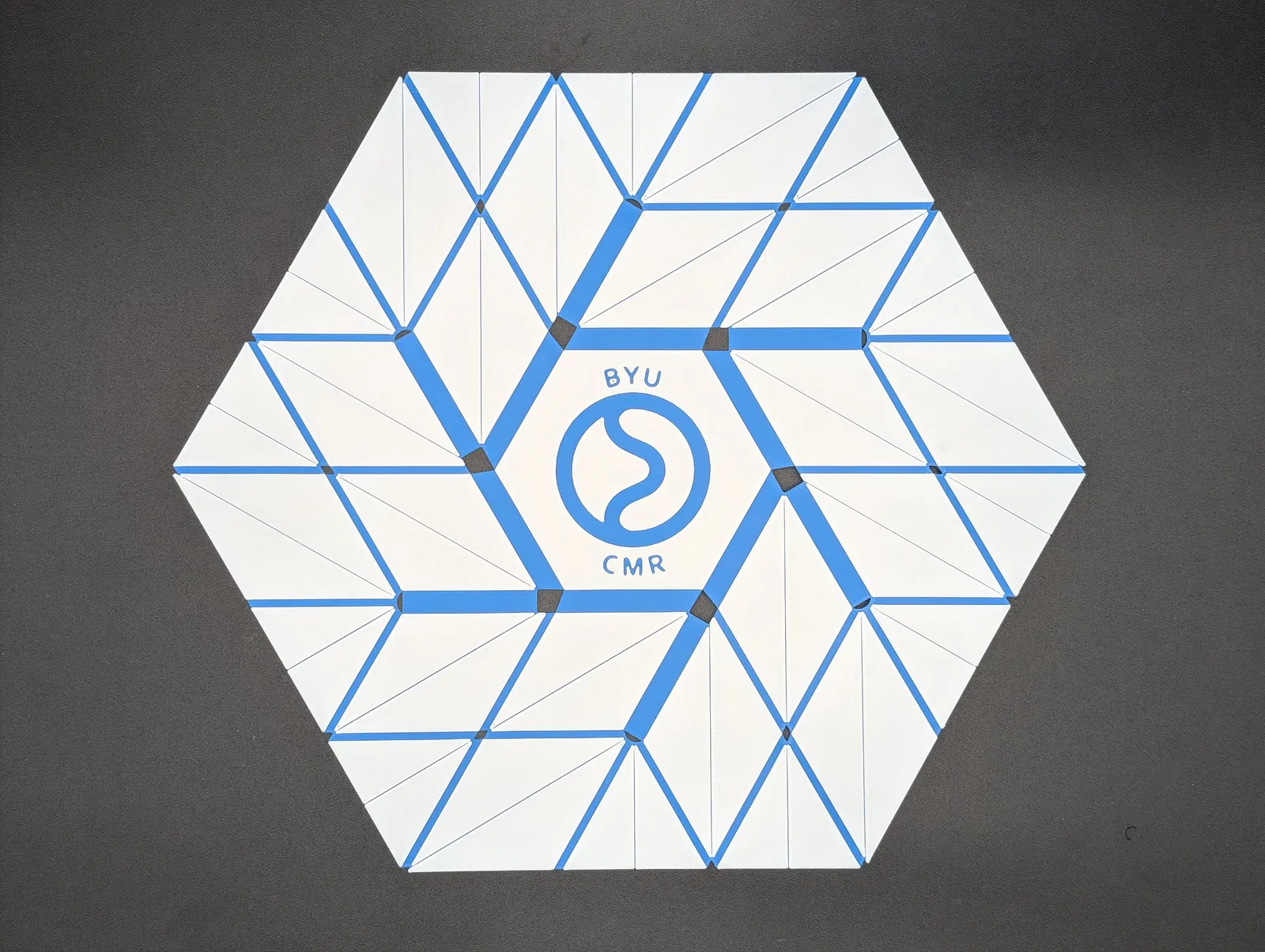
Đây là một mẫu hoa văn origami Yoshimura có thể in 3D, cụ thể là mẫu Y-6.2 (nghĩa là nó có đối xứng sáu cạnh và hai vòng xoay mở rộng ra từ trung tâm). Các màng giữa các tấm được thiết kế để phù hợp với quá trình gấp, và cho phép mô hình đứng ở cả hai trạng thái đóng và mở.
Xem video YouTube này của EzOrigami để biết hướng dẫn cách gấp của riêng bạn:
BYU cũng đã làm một video thảo luận chi tiết về các mẫu hoa văn này và tiềm năng của chúng trong các cơ chế kỹ thuật và hơn thế nữa:
Hướng dẫn in ấn
Mô hình này tốt nhất nên in bằng PETG, hoặc một loại vật liệu tương tự linh hoạt khác (PLA cũng dùng được). Mô hình, ở tỷ lệ hiện tại, được thiết kế để in với hai lớp 0.1mm làm đế. Điều này đảm bảo rằng tất cả các nếp gấp có hai lớp sợi filament chồng lên nhau để uốn cong (in với một lớp đáy dày 0.2mm sẽ có nghĩa là một số bản lề có thể bị gãy rất dễ dàng). Ở đây là một hướng dẫn về cách sửa đổi độ cao lớp riêng lẻ trong PrusaSlicer.
Bạn có thể thử nghiệm in hai lớp đầu tiên bằng vật liệu linh hoạt hơn, sau đó in các lớp còn lại bằng vật liệu cứng hơn. PLA đã hoạt động tốt cho các mô hình chúng tôi đã làm trên máy in của mình. Xem bài đăng này để biết hướng dẫn về cách tạo bản lề sống của riêng bạn.
Tốt nhất là nên lấy bản in ra khỏi tấm đế sớm hơn là muộn hơn: nhiệt dư từ tấm đế sẽ giúp bạn uốn các nếp gấp vào mô hình (xem video này để biết hướng uốn chúng).
Bạn có thể thử nghiệm in hai lớp đầu tiên bằng vật liệu linh hoạt hơn, sau đó in các lớp còn lại bằng vật liệu cứng hơn. PLA đã hoạt động tốt cho các bản trình diễn chúng tôi đã làm.
Tìm hiểu thêm
Thiết kế này được phát triển bởi Nhóm Cơ chế Tuân thủ và Robot (CMR) từ Đại học Brigham Young (BYU). Theo dõi chúng tôi tại @byucmr trên Instagram, @CompliantMechanismsResearchGroup trên Facebook, hoặc truy cập trang web BYU Compliant Mechanisms and Robotics (CMR) để tìm hiểu thêm về các cơ chế tuân thủ.
Thông tin kỹ thuật
Để đọc nghiên cứu nền tảng đằng sau công trình này, hãy truy cập: https://doi.org/10.1098/rspa.2025.0299
Tài liệu bổ sung có thể được tìm thấy tại ScholarsArchive: https://scholarsarchive.byu.edu/data/85/
Sở hữu trí tuệ
Các tệp in 3D có thể tải xuống được cung cấp ở đây có thể được sử dụng, sửa đổi và thưởng thức cho mục đích phi thương mại. Để cấp phép công nghệ cơ chế có thể phát triển cho các ứng dụng thương mại, vui lòng liên hệ:
BYU Technology Transfer Office
3760 Harold B. Lee Library
Brigham Young University
Provo, UT 84602
Phone: (801) 422-6266
https://techtransfer.byu.edu/contact
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!