Wheeliebot - w/ Code: Hướng dẫn lắp ráp và lập trình chi tiết

Hướng dẫn chi tiết cách lắp ráp, hiệu chỉnh và lập trình robot Wheeliebot tự cân bằng, điều khiển từ xa. Phù hợp cho người mới bắt đầu với các bộ phận in 3D, ESP32 và mã nguồn mở.






Mô tả
CẬP NHẬT:
Có một số vấn đề trong thiết kế của bảng mạch PCB. Tôi sẽ thực hiện một bản sửa đổi và phát hành phiên bản mới.
1. Giới thiệu
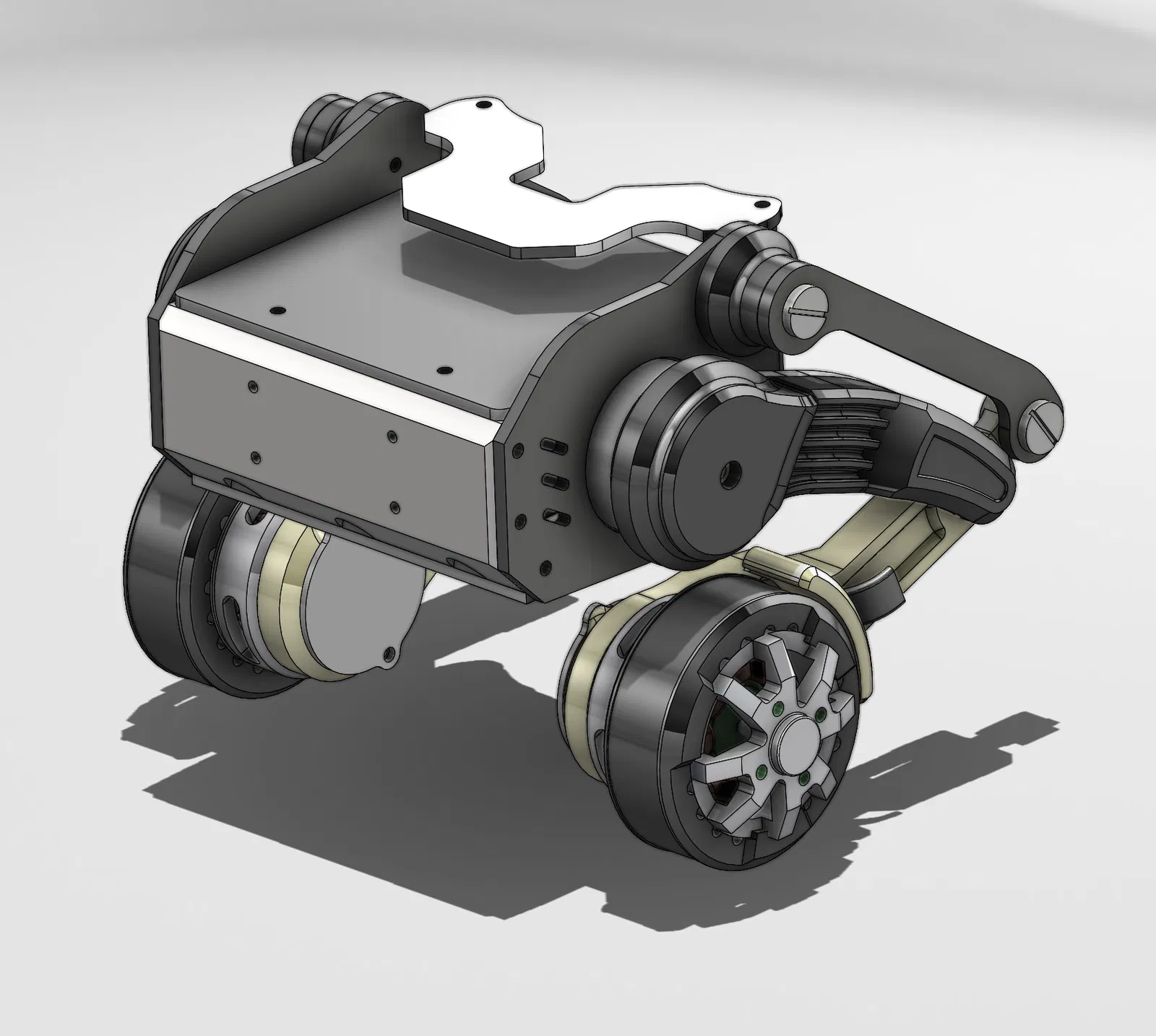
Là một người hoàn toàn không có kinh nghiệm về phần cứng trước đây, tôi đã bắt tay vào một dự án đầy tham vọng: chế tạo một robot bánh xe-chân chức năng bằng cách sử dụng các bộ phận in 3D được chế tạo sẵn và các tài nguyên mã nguồn mở. Hướng dẫn này tập trung vào việc lắp ráp, hiệu chỉnh và lập trình—rất phù hợp cho các nhà phát triển muốn đi sâu vào lĩnh vực robot.

Công cụ
Các công cụ cần thiết hoặc nên có cho dự án này.
Mỏ hàn TS101 Link Aliexpress Link Amazon (Đề xuất)
Bộ đầu hàn cấy nhiệt - Dành cho TS101 Link Aliexpress Link Amazon (Đề xuất)
Máy vặn vít điện chính xác Link Aliexpress Link Amazon (Đề xuất)
Bộ lục giác Link Aliexpress Link Amazon
Bộ tua vít Torx Link Aliexpress Link Amazon
Cờ lê lực Link Aliexpress Link Amazon
Kìm tuốt dây Link Aliexpress Link Amazon Kìm cắt dây Link Aliexpress Link Amazon
Dụng cụ ép cấy nhiệt Link Aliexpress Link Amazon
Dụng cụ bấm cos Link Aliexpress Link Amazon
Mỏ hàn - Loại thông thường (Tùy chọn) Link Aliexpress Link Amazon Lựa chọn tiết kiệm chi phí
Đầu hàn cấy nhiệt - Bộ (Tùy chọn) Link Aliexpress Link Amazon Lựa chọn tiết kiệm chi phí
Bộ tua vít chính xác Link Aliexpress Link Amazon Lựa chọn tiết kiệm chi phí
Vật tư tiêu hao
Bộ cấy nhiệt Link Aliexpress Link Amazon Dây điện - Nguồn Link Aliexpress Link Amazon
Dây điện - Truyền thông / Tín hiệu Link Aliexpress Link Amazon
Bộ ốc nắp M3 Link Aliexpress Link Amazon
Bộ ốc Torx M3 Link Aliexpress Link Amazon
Bộ ốc đầu dù M3 Link Aliexpress Link Amazon
Bộ đầu cốt Link Aliexpress Link Amazon
Đai giữ cáp Velcro tái sử dụng Link Aliexpress Link Amazon
Nhựa in 3D - PC / ASA / ABS / PETG Link Aliexpress Link Amazon
Nhựa in 3D - Loại kỹ thuật Link Aliexpress Link Amazon
Sợi Carbon & Nhiệt độ cao
Nhựa in 3D - PLA Link Aliexpress Link Amazon
Nhựa in 3D - TPU Link Aliexpress Link Amazon
Tại sao Robot Bánh Xe-Chân là Lựa chọn Tuyệt vời cho Người mới Bắt đầu về Robot học
Nếu bạn mới làm quen với robot học và đang tìm kiếm một dự án vui vẻ, đầy thử thách và mang tính giáo dục cao, thì robot bánh xe-chân là một lựa chọn xuất sắc. Kết hợp sự đơn giản của bánh xe với sự linh hoạt của chân, những robot lai này mang đến một cách học thực tế về các khái niệm chính trong cơ khí, điện tử và lập trình—mà không yêu cầu chuyên môn cao.
Tại sao nên bắt đầu với Robot Bánh Xe-Chân?
-
Đường cong học tập cân bằng
-
Bánh xe giúp dễ dàng bắt đầu (điều khiển đơn giản, chuyển động ổn định).
-
Chân giới thiệu cho bạn về lập kế hoạch dáng đi và thuật toán cân bằng (phức tạp hơn nhưng đáng giá).
-
-
Ứng dụng Thực tế
- Thiết kế bánh xe-chân được sử dụng trong robot giao hàng, drone thăm dò và thậm chí cả robot tự hành trên Sao Hỏa, giúp kỹ năng của bạn có thể áp dụng trực tiếp.
-
Chi phí thấp, Độ linh hoạt Cao
- Không giống như robot hai chân hoàn chỉnh, robot bánh xe-chân có thể được chế tạo với chi phí thấp bằng các bộ phận in 3D, ESP32 và servo kỹ thuật số.
Các bộ phận chính cho bản dựng của bạn
1. ESP32: Bộ não
-
Tại sao?
-
Wi-Fi/Bluetooth tích hợp cho phép điều khiển từ xa (ví dụ: qua điện thoại thông minh) và tích hợp IoT.
-
Bộ xử lý lõi kép xử lý đồng thời việc hợp nhất dữ liệu cảm biến (dữ liệu IMU) và điều khiển động cơ.
-
Hỗ trợ PWM để điều khiển servo/động cơ chính xác.
-
-
Ví dụ Sử dụng:
// Đọc dữ liệu IMU để kiểm soát cân bằng if (imu.getPitch() > 15) { adjustLegServos(); // Ngăn ngừa bị nghiêng }
2. Chuẩn bị Phần cứng
2.1 Danh sách kiểm tra các bộ phận
Kiểm tra danh sách vật liệu.
2.2 Công cụ
• Bộ tua vít lục giác M3 • Đồng hồ đo lực kỹ thuật số (phạm vi 0.2–2.5 N·m)

3. Lắp ráp Từng bước
3.1 Tấm đế & Đối trọng
Cố định tấm đế và khối đối trọng bằng ốc M3×8mm.

3.2 Gắn Servo
-
Gắn các miếng đệm đồng thau ngắn vào mô-đun kết nối servo.
-
Gắn servo vào mô-đun, căn chỉnh các trục đầu ra hướng ra ngoài.
-
Cố định tấm đế bằng ốc M2.5×10mm.




3.3 Lắp đặt Bo mạch Chính
• Sử dụng các miếng đệm đồng thau dài (phía trước) và các miếng đệm ngắn (phía sau) để gắn bo mạch chính ESP32. • Đặt đai ốc vào bộ phận kết nối chân được in 3D và lắp ráp bằng ốc. • Cố định các tấm bên bằng ốc M3×6mm.




3.4 Lắp đặt Trục bánh xe
-
Lắp trục bánh xe in 3D và lốp xe vào động cơ không chổi than.
-
Gắn các trục bánh xe in 3D vào trục động cơ bằng ốc lục giác M4×8mm.
-
Cảnh báo: Căn chỉnh mặt phẳng trục trong khoảng ±0.2mm để tránh bị trượt.


3.5 Thiết lập Bo mạch Mã hóa (Encoder Board):
- Gắn nam châm vào trụ nối bằng nhựa trắng in 3D
- Lắp trụ này vào vị trí màu xanh lá cây trên động cơ (như trong hình). Có thể dùng keo để tăng cường độ ổn định nếu cần.
- Phóng to các lỗ vít trên các bộ phận chân bằng nhựa Sintered Nylon (do có sự không khớp nhỏ về kích thước) và gắn các bo mạch mã hóa.



3.6 Kết nối Chân-Động cơ
- Lắp trụ nối vào bộ phận chân và gắn ổ bi vào trụ như trong hình.
- Chèn đai ốc vào các khe được chỉ định.
- Lắp cánh tay servo vào bộ phận chân và kết nối bộ phận chân vào vị trí được chỉ định trong hình.
- Lưu ý: Các tấm chắn lốp dài hơn nên hướng về phía sau để tránh va chạm.






- Gắn chân vào các động cơ không chổi than.
- Trượt các ống lót lên ốc, gắn ổ bi lên các ống lót và cố định chúng vào cấu trúc hỗ trợ.



4. Phần mềm & Hiệu chỉnh
Nhấn vào đây để tải xuống công cụ và vật tư
4.1 Hiệu chỉnh Vị trí Zero của Servo
Công cụ
• Arduino IDE 2.3.4 • Công cụ Hiệu chỉnh FD
Các bước
- Cài đặt Arduino IDE và phiên bản esp32 2.0.3.

- Mở
SteeringEngineDebug.ino(nằm trong/Tools/SteeringEngineDebug) để Tải lên Mã hiệu chỉnh. - Bật công tắc nguồn trước khi kết nối với máy tính.

- Chọn ESP32 Dev Module và tải lên.



- Thiết lập Vật lý:
• Mở FD.exe (nằm trong /Navbot-EN01/Tools/FD1984-240227).
• Đặt robot lên một khối hỗ trợ.
• Ngắt kết nối một dây servo để tránh xung đột ID, và hiệu chỉnh từng cái một.



6) Hiệu chỉnh qua FD:
• Trong phần mềm FD, chọn số cổng, đặt tốc độ baud, kết nối và tìm kiếm servo. Như trong hình, ‘STS3032’ tương ứng với servo chân trái của robot. Khi kết nối servo chân phải, hãy đặt ID của nó thành 2. • Sau khi hoàn thành hiệu chỉnh vị trí zero cho hai servo chân của robot, hãy kết nối lại dây servo một cách chính xác.



5. Triển khai Firmware
5.1 Cài đặt Phụ thuộc
- Mở mã nguồn dự án nằm tại \Navbot-EN01\Src\wl_pro_robot trong Arduino IDE.
- Cài đặt các thư viện phụ thuộc nằm tại \Navbot-EN01\Src\libraries, chọn từng tệp thư viện một.


- Vì chương trình đã biên dịch có dung lượng lớn, hãy sử dụng sơ đồ phân vùng “No OTA (Large APP)” để đảm bảo nó tải lên chính xác.

- Chọn ESP32 Dev Module và nhấp vào Upload.



6. Kiểm tra & Điều khiển
6.1 Trình tự Khởi động
- Lắp Pin LiPo 7.4V vào cổng XT30.

- Sau khi gạt công tắc, robot sẽ bật đèn LED màu đỏ để báo hiệu khởi động, sau đó bắt đầu tự kiểm tra trong vài giây.
- Kết nối điện thoại thông minh của bạn với mạng WiFi có tên navbot_en01- XXXXXX (mật khẩu: 12345678).
- Sau khi kết nối WiFi thành công, truy cập giao diện điều khiển của robot bằng cách nhập địa chỉ IP 192.168.1.11 vào trình duyệt web của bạn.

6.2 Kích hoạt:
Nhấp vào Robot Go và nâng robot lên bằng tay – nó sẽ tự cân bằng trong vòng 2 giây.



Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!