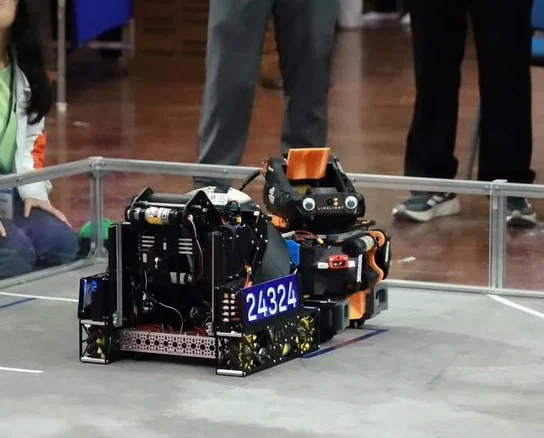
BABz v3 sep 1: Robot Thử Nghiệm Cho Giải FTC

BABz v3 sep 1 là robot thử nghiệm của đội 22999 KMUTNB GEARS tham gia FTC Thailand 2025. Robot này nổi bật với khung gầm mô-đun có thể tháo lắp nhanh chóng bằng hệ thống chốt tự phát triển và vỏ "Stealth" mang tính thẩm mỹ cao.














Mô tả
BABz v3 sep 3 là robot thử nghiệm hiện tại của đội 22999 KMUTNB GEARS đã tham gia FTC Thailand 2025 và nhận giải "Design award" của khu vực.
v3 Nhấn mạnh mạnh mẽ vào khả năng bảo trì của robot, điểm bán hàng chính của nó là các mô-đun ổ đĩa có thể tháo lắp nhanh chóng bằng hệ thống chốt mà đội chúng tôi tự phát triển cùng với các đường cong có tính thẩm mỹ của dòng "Stealth" mà đội chúng tôi đã bắt đầu trong năm nay.
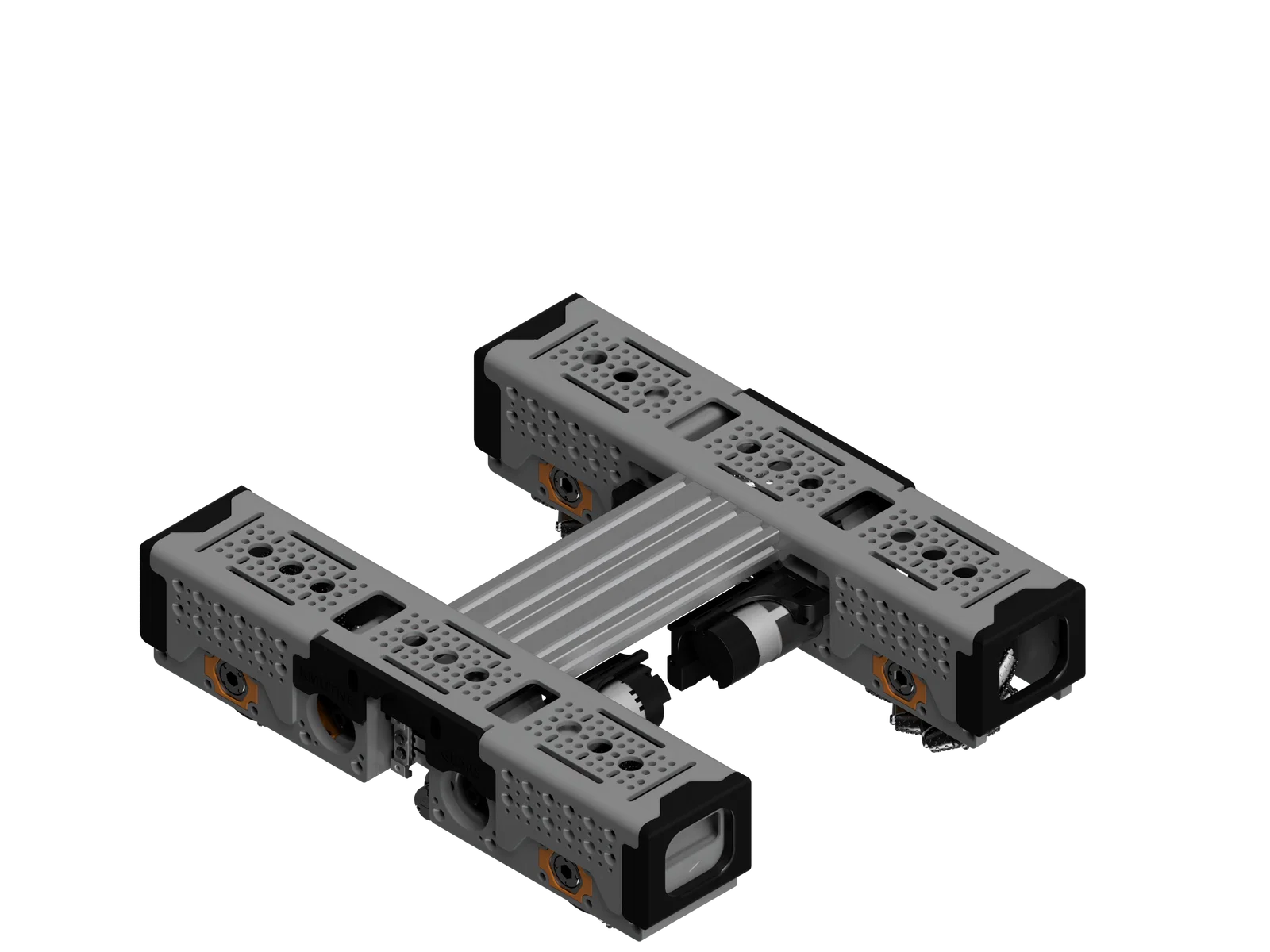
Khung gầm mô-đun
Khung gầm mô-đun của BABz v3 đạt được bằng cách sử dụng hệ thống chốt sẽ khóa từng mô-đun vào bộ xương của khung gầm. Nguồn điện cho động cơ được kết nối thông qua đầu nối wago, cho phép tháo lắp nhanh chóng khi tháo rời.
Vỏ Stealth
Vỏ Stealth chủ yếu là một lựa chọn thẩm mỹ của đội chúng tôi, có các đường cong mà hầu hết mọi người sẽ coi là lãng phí thời gian, chúng tôi biến một nắp an toàn nhàm chán thành thứ gì đó làm hài lòng ánh mắt của những người xem và vẫn hoạt động như một nắp an toàn thông thường. Vỏ Stealth cũng làm cho thiết kế của chúng tôi trông tinh tế và khí động học, mặc dù vỏ Stealth không cung cấp bất kỳ cải tiến nào về khí động học của robot.
Thông số kỹ thuật
BABz v3 vẫn sử dụng động cơ DC goBilda yellowjacket 1152 vòng/phút, bây giờ với tỷ số truyền 2:5 cho hệ thống truyền động. Phần còn lại của cơ chế ghi điểm sử dụng động cơ DC 312 vòng/phút cũng như các servo goBilda có thể lập trình từ bộ khởi động 2024-2025.
| Category | value | comment |
|---|---|---|
| Chassis velocity | 1.8 m/s (ideal) | 2:5 gear ratio of 1152 rpm motor |
| Turret flywheel speed | 4000 rpm (max) | |
| Flywheel rev up time (0 -> 4000) | 2 seconds | determined from the calculation of moment of inertia |
| Turret turning rate | 0.5 rad/s (programmed) | |
| 1.2 rad/s (physically) |
Tất cả trong tất cả, BABz v3 vẫn là một robot chưa hoàn hảo với nhiều khuyết điểm có thể tìm thấy trên toàn bộ robot. BABz yếu khi va chạm trong trận đấu, trong trường hợp bị đánh mạnh và dẫn đến máy tính pinpoint bị lệch, ngăn chứa pin bị kéo ra nhờ hệ thống chốt. Hệ thống nạp liệu kém hơn các thiết kế robot khác tại sự kiện. Cần phát triển thêm cho giải đấu premier cho thiết kế này. Nhưng đối với mục đích của nó như một khung gầm thử nghiệm trong năm nay, tính mô-đun của khung gầm đã hỗ trợ đội bảo trì đáng kể, giảm từ 4 người bảo trì xuống còn 2 người và chỉ cần các công cụ tối thiểu để truy cập một số bộ phận của BABz.
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!