Robot Swerve Truyền Động Vi Sai XRP!

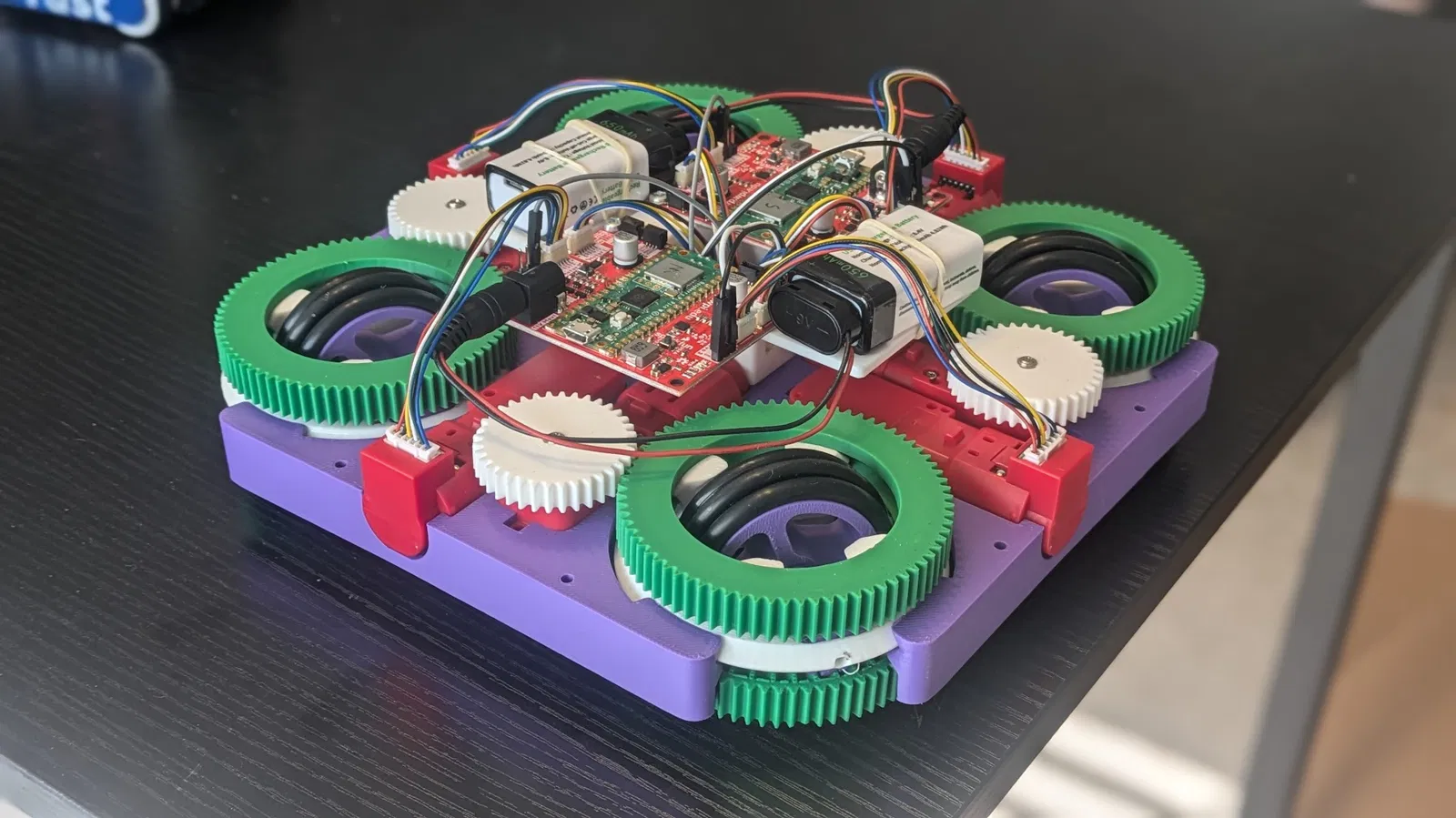
Chế tạo Robot Swerve Truyền Động Vi Sai XRP! Dự án 'khủng' này sử dụng 100% mô-đun nhựa, chủ yếu là in 3D. Cần thêm phần cứng và độ chính xác cao khi in để đạt hiệu quả tốt nhất. Phần mềm điều khiển có sẵn trên Github.



Mô tả
Đây là một dự án 'khủng', một giấc mơ mà tui ấp ủ gần 8 năm rồi đó. Swerve giống như trong FRC, mà là phiên bản thu nhỏ nha! Xem thiết kế CAD trên OnShape tại đây.
Cái dự án này không dành cho mấy bạn yếu tim đâu, cần thêm linh kiện nè: 2x Bo mạch XRP 8x Motor XRP (bán theo bộ 2 cái) 2x Pin 9v li-ion 2x Cáp nối 9v sang jack tròn 2x Dây thun (để cố định pin vào robot) 12x Vòng đệm O-ring: đường kính trong 1-1/2", đường kính ngoài 1-7/8", dày 3/16" (cho bánh xe) 4x Trục Lego 8 Stud (mấy bạn có thể in 3D mấy cái này nếu gan dạ) 4x Vít M3 6mm (để gắn bo mạch XRP vào đế đựng linh kiện) 4x Vít #6-32 dài 0.5in (để gắn đế đựng linh kiện vào khung xe) 3x Dây Dupont cái-cái (để giao tiếp serial giữa hai bo mạch XRP)
Không có bạc đạn nha! Các module và bánh răng vòng trượt trực tiếp trên nhựa với nhau, giúp giảm trọng lượng và chi phí. Cái này thì đòi hỏi độ chính xác cao khi in, nên in thử vài lần trước khi in hết các bộ phận nha. Tùy chỉnh cài đặt in để thay đổi độ chính xác. Bôi trơn các bề mặt trượt cũng là một ý hay đó. (Tui dùng Vaseline)
Phần mềm cho robot này có trên github.
Giấy phép

File mô hình









Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!