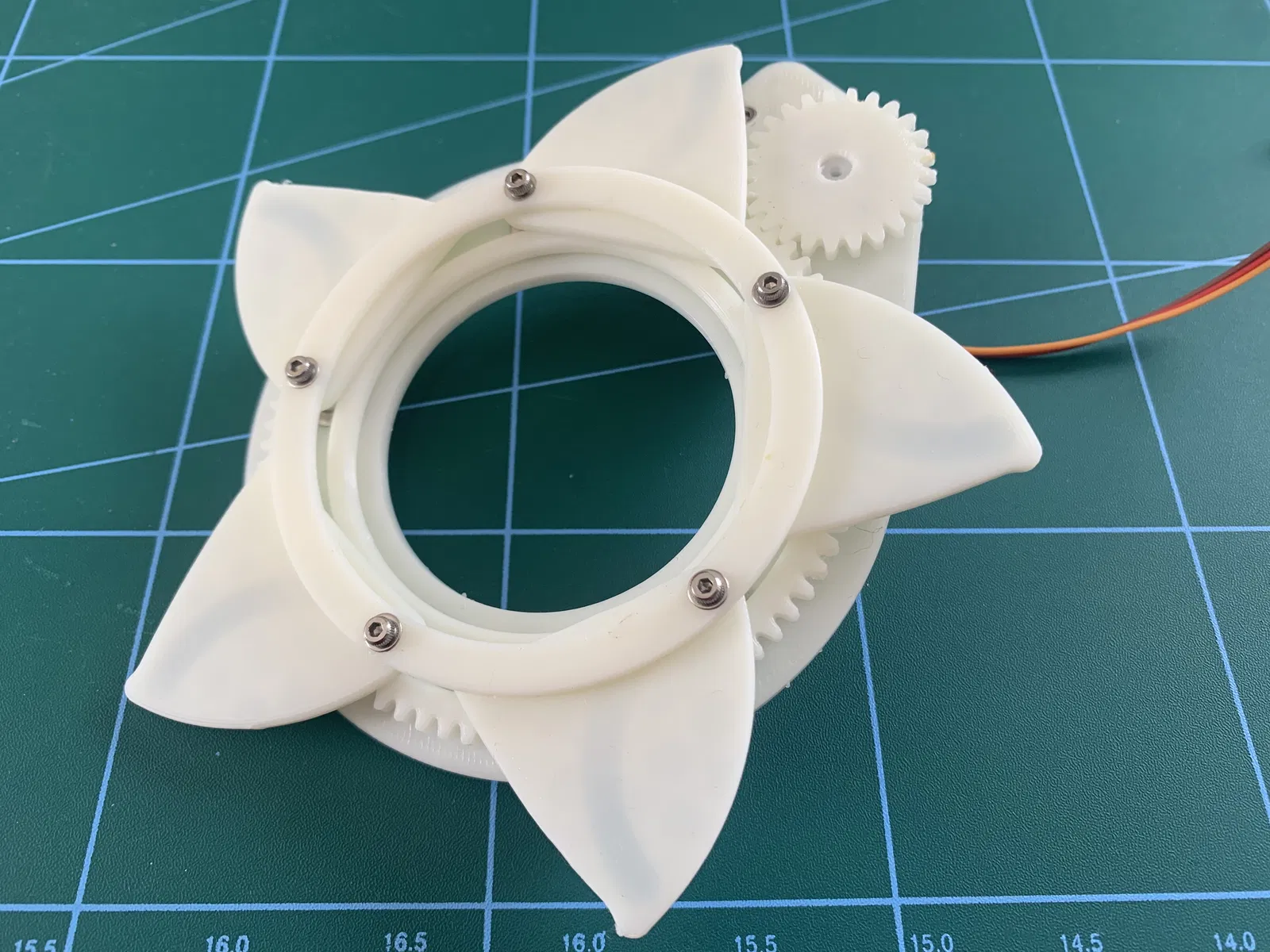
Khẩu độ "Aperture" 5 cánh cho Micro Servo SG90
Khẩu độ 5 cánh "Aperture" điều khiển bằng micro servo SG90. Mô hình có thể tùy chỉnh với tệp FreeCAD đi kèm. Bao gồm hướng dẫn in, vật tư bổ sung và lắp ráp chi tiết cho khung, vòng, cánh, và cơ cấu truyền động.



Mô tả
Giới thiệu
Mô hình này phục vụ hai mục đích. Thứ nhất, nó cho phép tôi thỏa mãn mong muốn bấy lâu nay - đó là chế tạo một khẩu độ hoặc mống mắt hoạt động bằng servo. Thứ hai, nó có thể hoặc không thể là một phần của thứ tôi đang lên kế hoạch cho xưởng của mình, nhưng chúng tôi không thể xác nhận hay phủ nhận điều đó!
Điểm mấu chốt là nó là một khẩu độ 5 cánh rất hay, có thể đóng mở bằng một micro servo đơn giản. Tôi đã chế tạo mô hình này đặc biệt cho TowerPro SG-90, nhưng nó sẽ hoạt động với hầu hết các loại servo tương tự.
Tôi đã bao gồm tệp FreeCAD gốc của mình ở đây để dễ dàng tùy chỉnh. Lỗ qua khẩu độ là 50mm.
Chế tạo
In
- 1x base.stl - Khung chính của thiết bị. In với hỗ trợ cho các lỗ đai ốc.
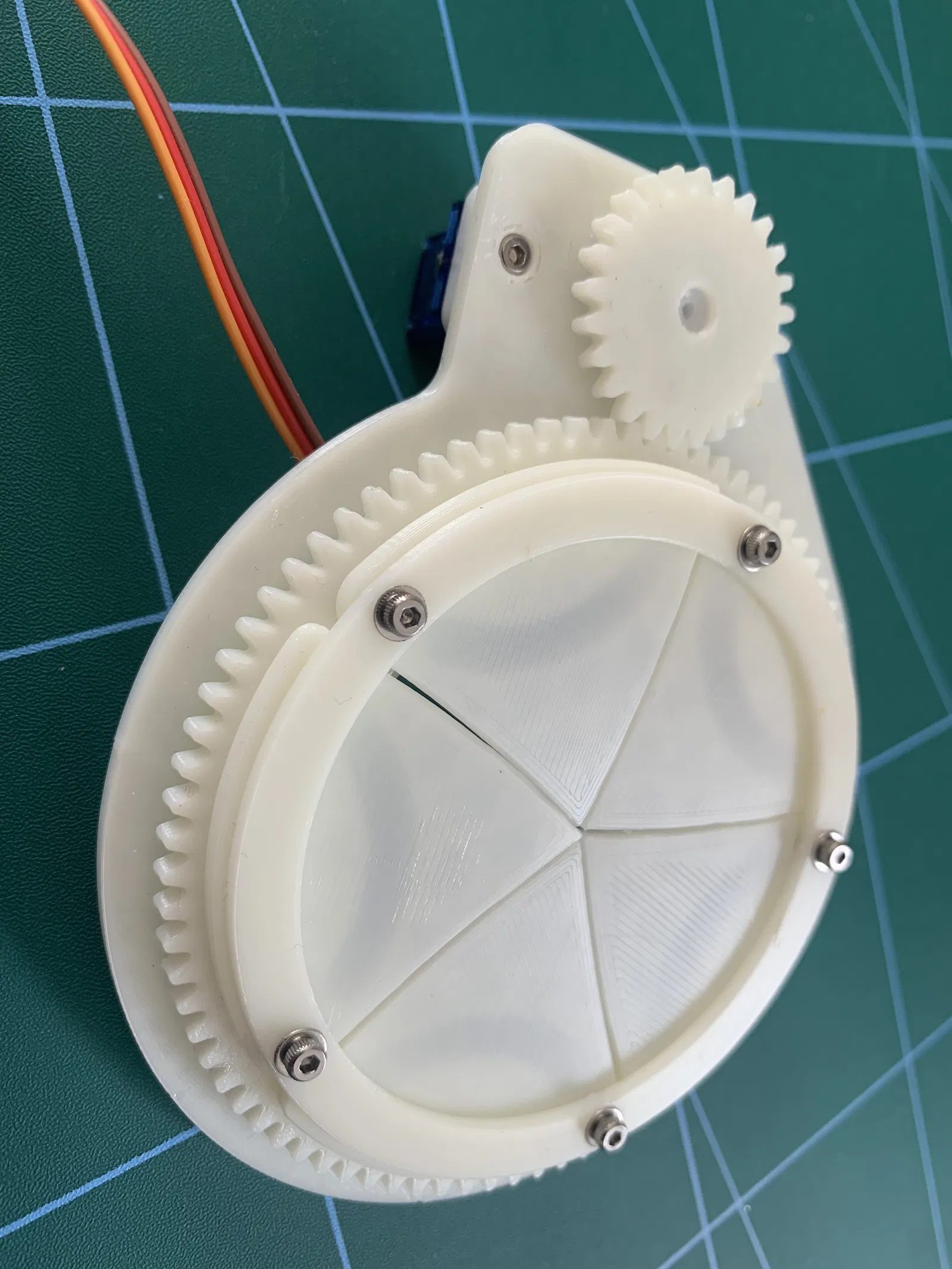
- 1x ring.stl - Được dẫn động bởi bánh răng truyền động và mở/đóng các cánh. Không cần hỗ trợ
- 1x drive.stl - Gắn vào servo và dẫn động bánh răng vòng. Không cần hỗ trợ
- 1x top.stl - Giữ mọi thứ lại với nhau để không bị bung ra khi hoạt động. Không cần hỗ trợ khi in úp ngược.
- 1x plate.stl - Để gắn servo vào đế. Không cần hỗ trợ
- 5x blade.stl - Mở và đóng bởi bánh răng vòng. Không cần hỗ trợ khi in úp ngược.
Tôi đã in mô hình của mình bằng PLA trắng phát quang cho vui, nhưng bất kỳ loại PLA chất lượng cao nào cũng đều ổn.
Vật tư bổ sung
- 7x Bu lông M2
- 7x Đai ốc M2
- 7x Vòng đệm M2
- 5x Vòng đệm M4 để làm miếng đệm. Đường kính trong khoảng 4 - 4.5mm
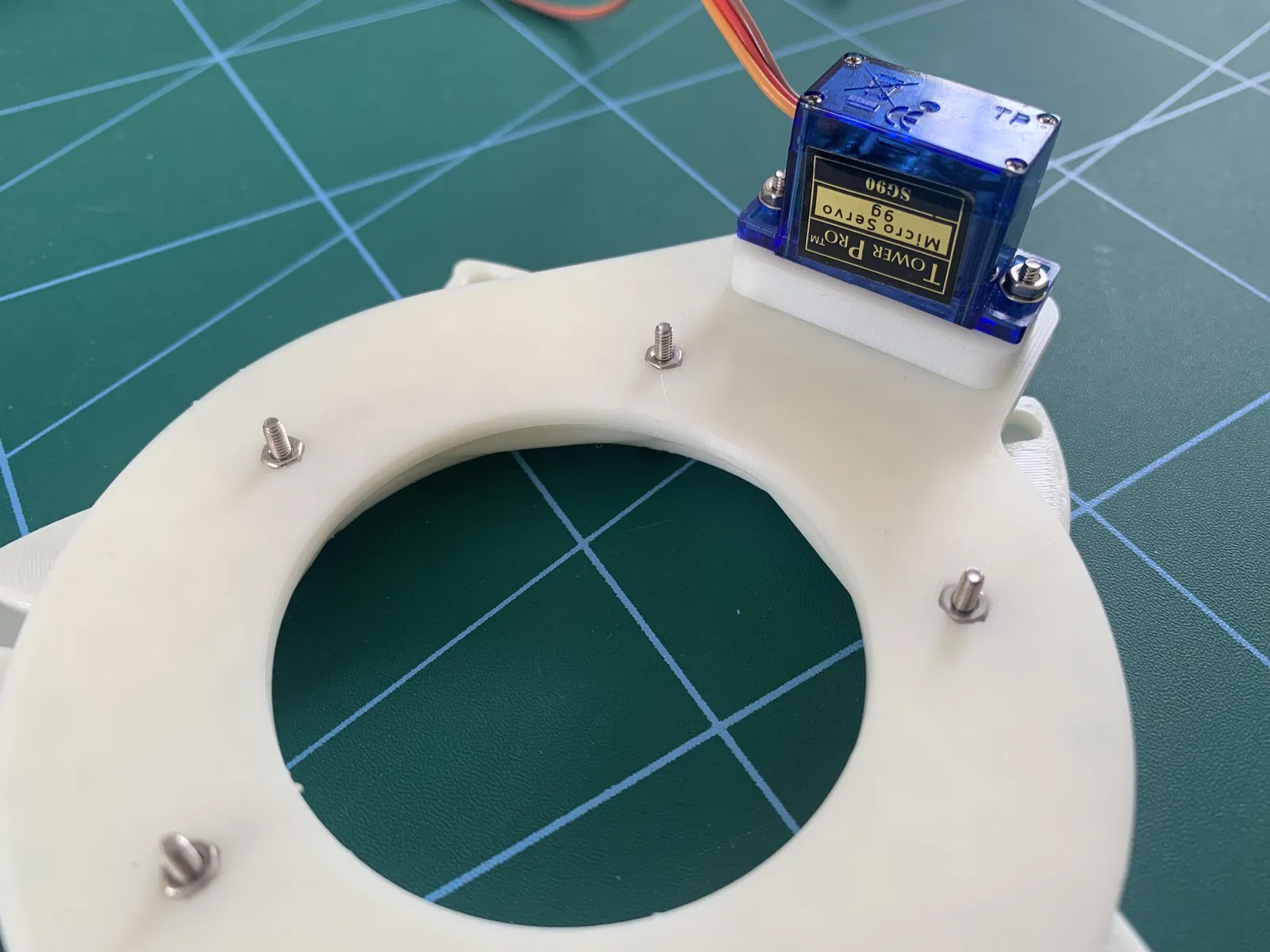
- 1x Microservo SG-90
- (tùy chọn) Bộ kiểm tra servo để thuận tiện hoặc mạch điều khiển servo khác.
Lắp ráp
Sau khi tất cả các bộ phận được in và sẵn sàng, chúng ta có thể bắt đầu lắp ráp.
- Đặt base lên một bề mặt phẳng và đặt một vòng đệm M4 lên mỗi trong số 5 trục nhô ra từ nó. Các vòng đệm này có thể khá lỏng vì chức năng chính của chúng là làm miếng đệm để bánh răng vòng không chạm trực tiếp vào đế.
- Đặt ring lên đế sao cho mỗi trục trên đế đi qua một khe dài trên vòng.
- Thêm mỗi blade sao cho trục từ đế đi qua lỗ trên cánh và chốt trên vòng khớp với khe trên cánh. Khi nhìn từ trên xuống, khe phải nằm ở bên phải của lỗ.
- Sau khi cả năm cánh đã vào vị trí, đặt top lên trên chúng. Mỗi trục từ đế sẽ khóa vào một chỗ lõm trên đỉnh.
- Chèn một đai ốc M2 vào mỗi chỗ lõm ở đáy của đế.
- Đặt một bu lông M2 với một vòng đệm vào mỗi trục và vặn vào đai ốc tương ứng từ bước #5. Có thể siết chặt các vít vì các trục đóng vai trò là miếng đệm để các cánh không bị kẹt.
- Đặt plate gắn vào vị trí bên dưới đế và luồn một vít M2 từ trên cùng của base.
- Đặt servo vào vị trí trên plate và cố định bằng đai ốc và vòng đệm M2.
- Cuối cùng, gắn drive vào servo sao cho nó ăn khớp với bánh răng ring. Có một chỗ lõm trên bánh răng để vừa với ốc vít. Cần cẩn thận đảm bảo rằng khi cánh liền kề với servo mở ra, nó không bị vướng vào bánh răng truyền động hoặc ốc vít của nó.
Bây giờ bạn đã sẵn sàng để chơi. Thưởng thức! Tôi đã sử dụng Arduino vì bộ kiểm tra servo không cho phép phạm vi chuyển động đầy đủ và do đó khẩu độ không mở đủ. Với Arduino, nó mở hoàn toàn. Micro servo có thể được kết nối trực tiếp với Arduino.
Giấy phép

File mô hình






Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!