Cảm biến Z Probe BFPTouch cho máy in 3D giá rẻ và chính xác

Bối cảnh tôi đã sử dụng một cảm biến cảm ứng làm cảm biến z_min chính của tôi. Tôi không thể sử dụng nó như cảm biến san bằng giường


















Mô tả
Bối cảnh
Tôi đã sử dụng một cảm biến cảm ứng như cảm biến Z_min chính của mình. Tôi không thể sử dụng nó như một cảm biến cân bằng giường vì tôi đã sử dụng một tấm thép rất mỏng và mềm dưới kính. Điều này dẫn đến một số vấn đề: chính tấm kính không hoàn hảo. Tấm thép bên dưới cũng không phẳng ngay cả khi bị nén, vì vậy cả thép và kính đều không đại diện cho bề mặt in THỰC SỰ. Chỉ có một đầu dò chạm mới có thể cung cấp điều đó!!!
Tôi thích ý tưởng về piezo - nhưng cũng dự định sử dụng PEI trong tương lai và tôi không muốn chạm vào một vòi phun nóng lên bề mặt đó.
Tôi rất thích BLTouch - nhưng thực tế là nó quá đắt so với sở thích của tôi và các bản sao không đáng tin cậy và cũng không rẻ.
Tôi không thích những thứ cồng kềnh, với dây di chuyển và những thứ như vậy, khi sử dụng một servo và một công tắc cơ học. Tôi cũng không tin tưởng vào khả năng lặp lại của vị trí servo.
Tôi đã phải lòng với hai thiết kế này: Robscar ThingJupacreations Thing
Rẻ như bèo, đơn giản, đáng tin cậy, không phụ thuộc vào vị trí servo (servo chỉ nâng đầu dò khi không sử dụng). Nhưng cả hai đều cồng kềnh và rất cụ thể cho máy in của chủ sở hữu.
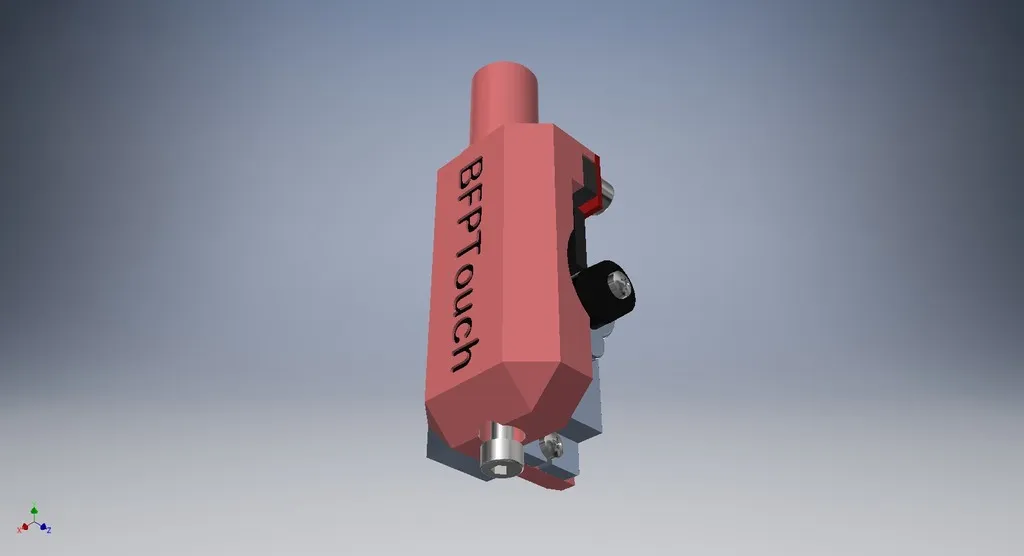
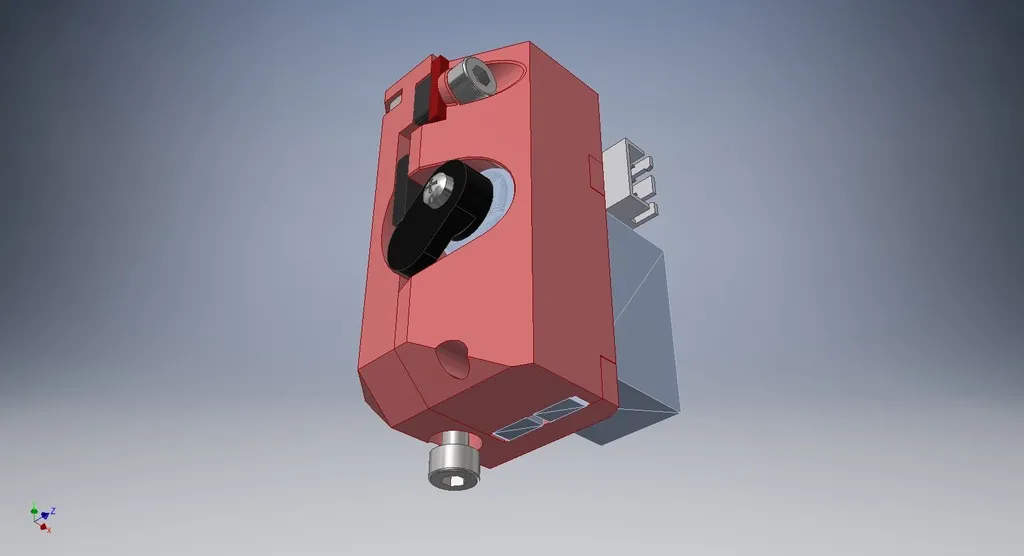
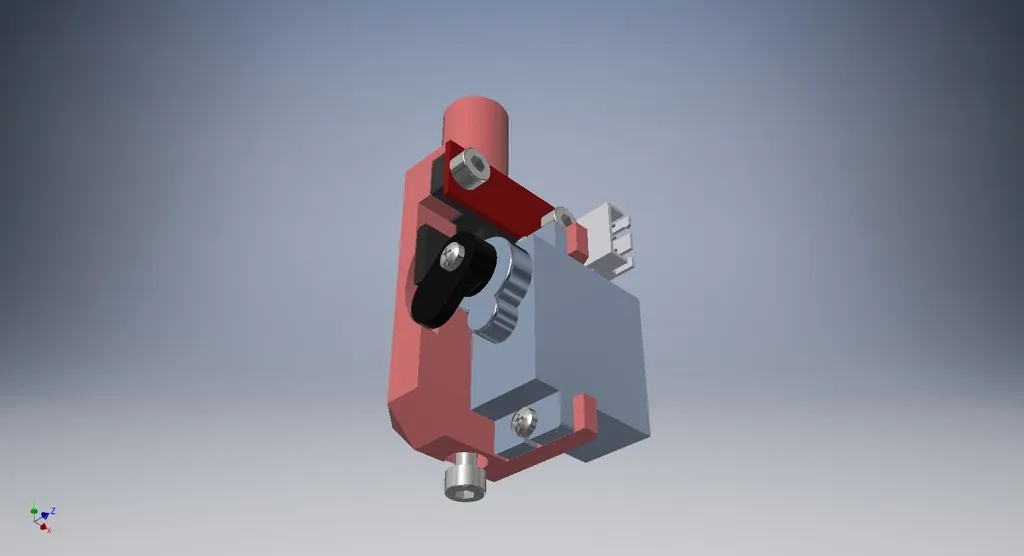
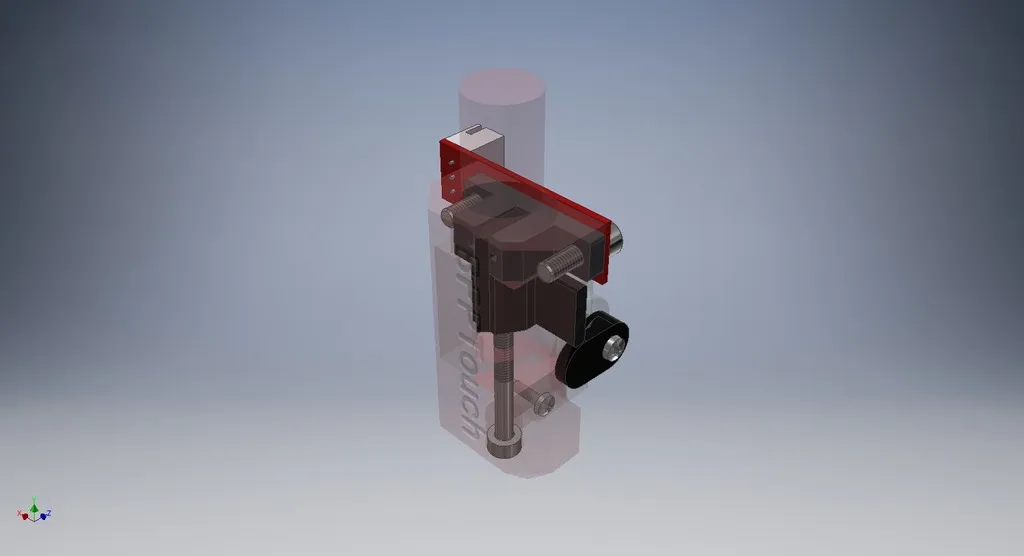
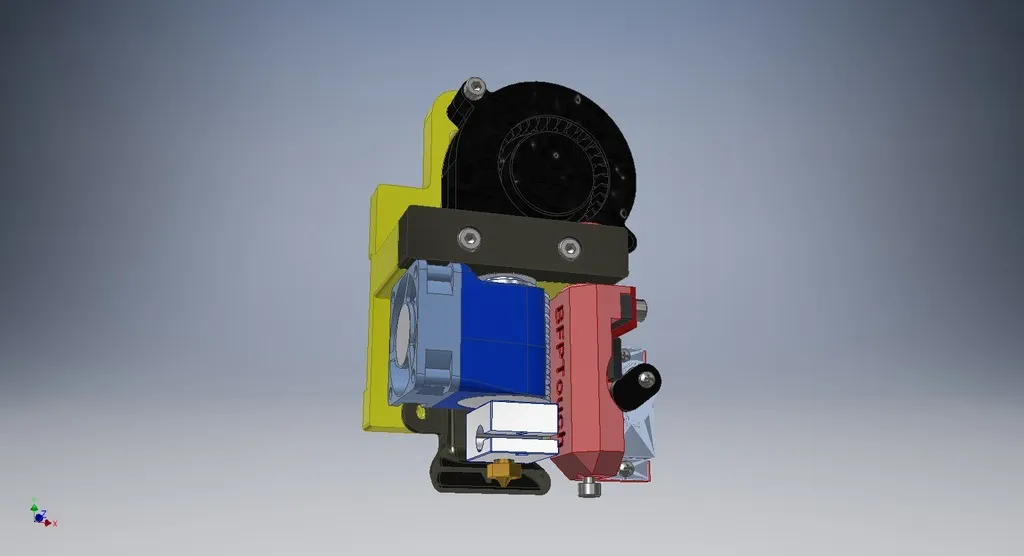
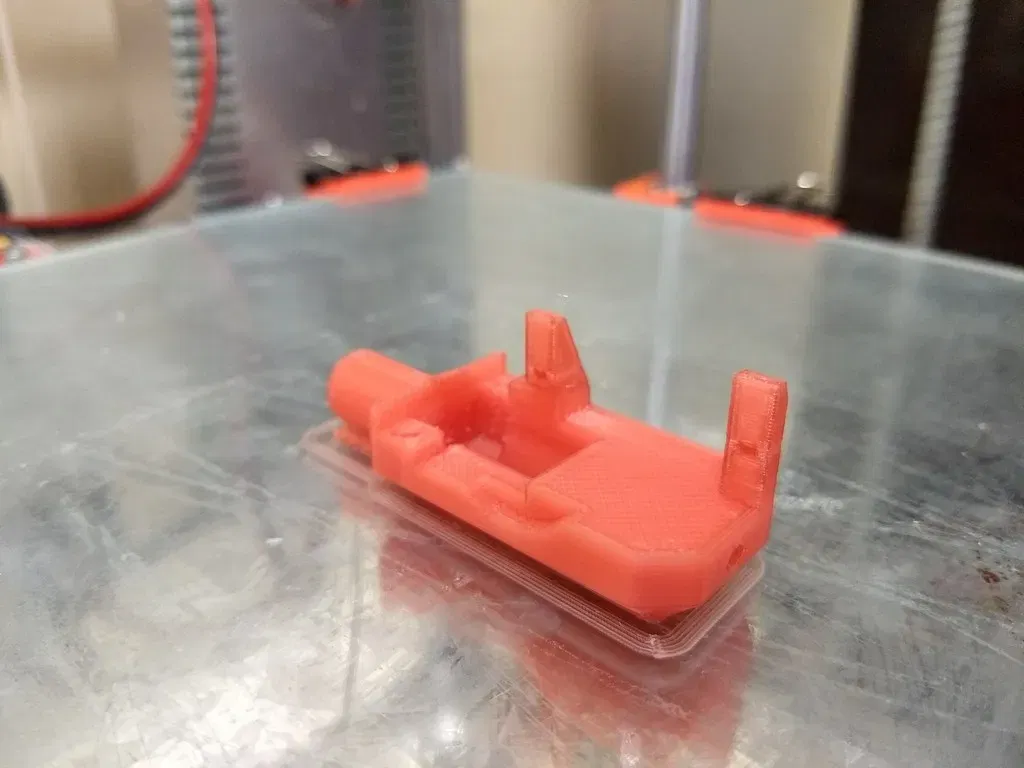
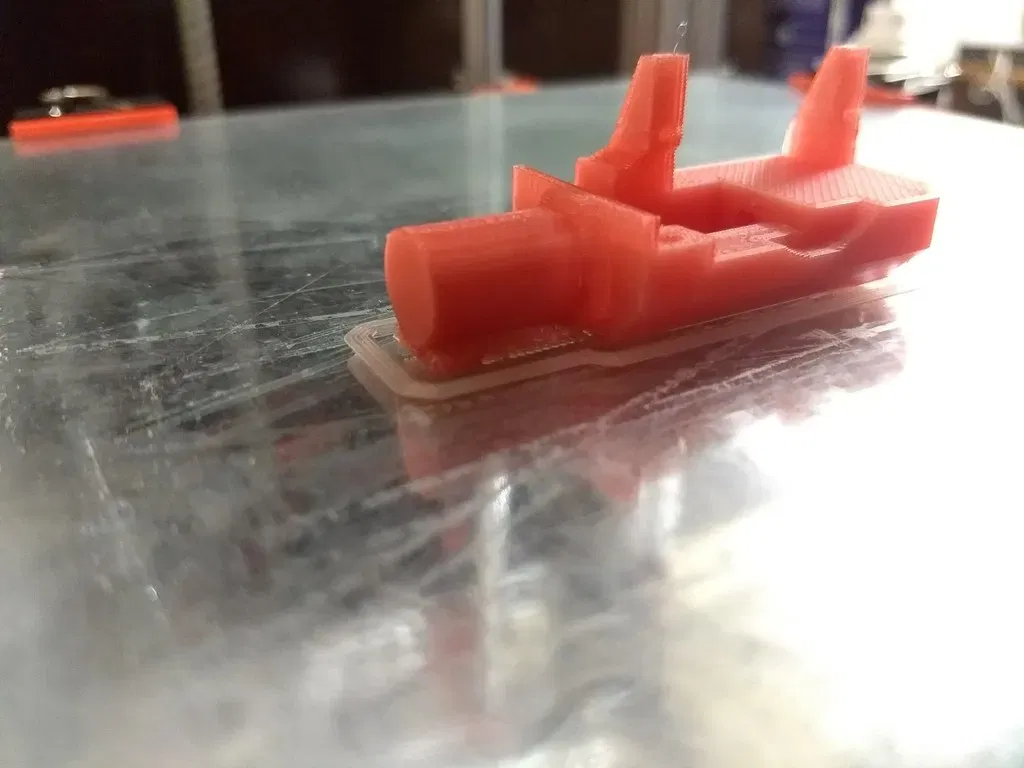
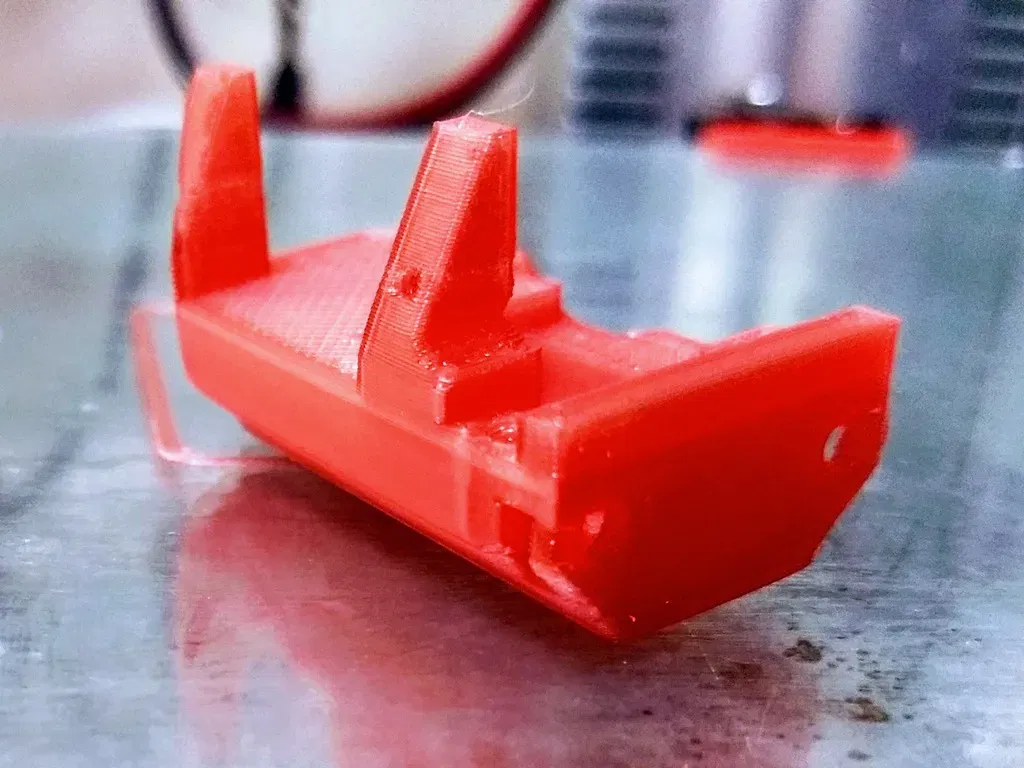
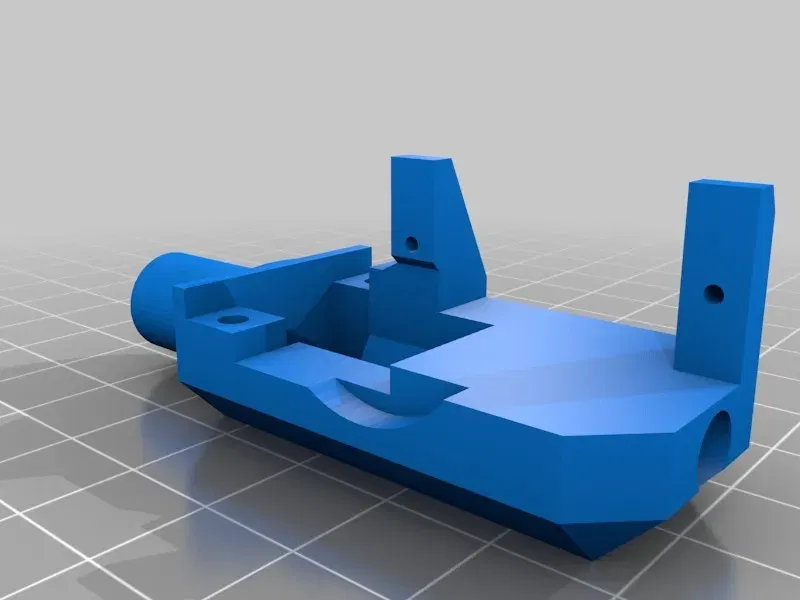
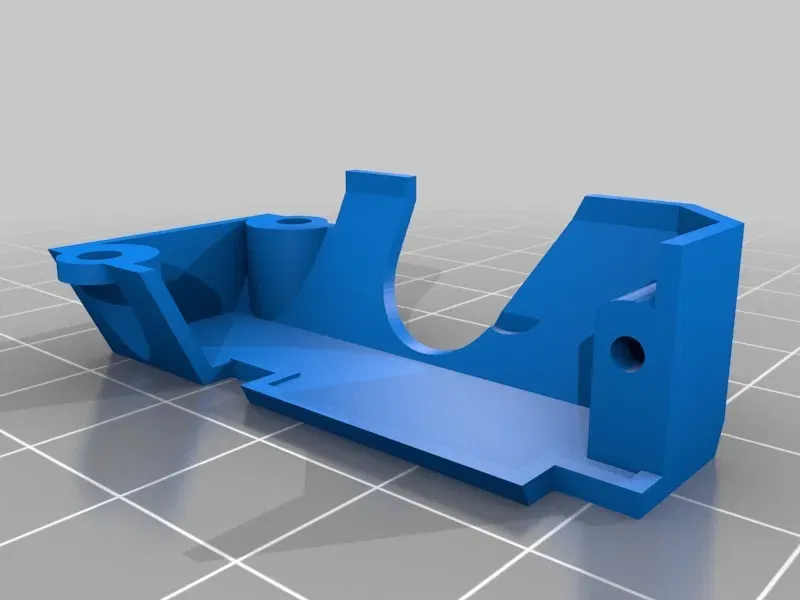
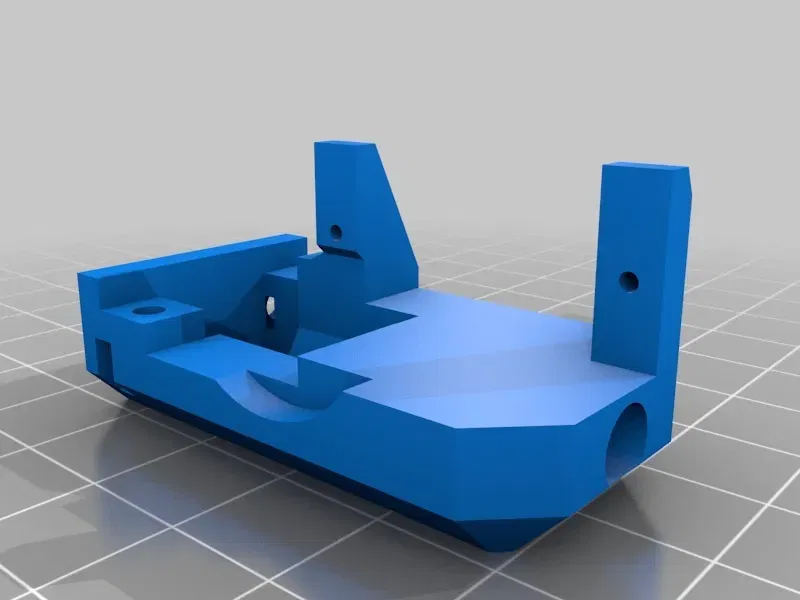
Vì vậy, tôi đã bắt đầu thiết kế một cái gì đó mà tôi có thể chỉ cần thay thế cảm biến cảm ứng cũ của mình tại Hypercube Evolution. Nó đủ nhỏ gọn cho bất kỳ máy in nào khác (thiết kế gắn khác nhau theo yêu cầu! Chỉ cần hỏi tôi.). Kích thước dựa trên footprint của BLTouch.
Tính năng chính
Một số tính năng chính (danh sách này dựa trên mô tả thiết kế của Jupacreations!):
- Nó có thể được sử dụng trên tất cả các bề mặt giường.
- Nó không nhạy cảm với sự thay đổi nhiệt độ.**
- Những gì bạn thấy là những gì bạn nhận được trong quá trình làm việc và thiết lập.
- Độ chính xác và khả năng lặp lại cao (tốt hơn bất kỳ thứ gì ít nhất ở mức giá này! ;-) )
- Giá thấp nhất có thể với các sản phẩm sẵn có để mua. (Tôi đã có mọi thứ trong tay...)
** Chà... nó nhạy cảm với nhiệt độ... Nhưng lỗi của tôi: Tôi đã đặt cái đó ngay trên đường dẫn của quạt làm mát đầu nóng! Đừng làm vậy!!!! Tôi đang làm việc để tìm ra giải pháp :D
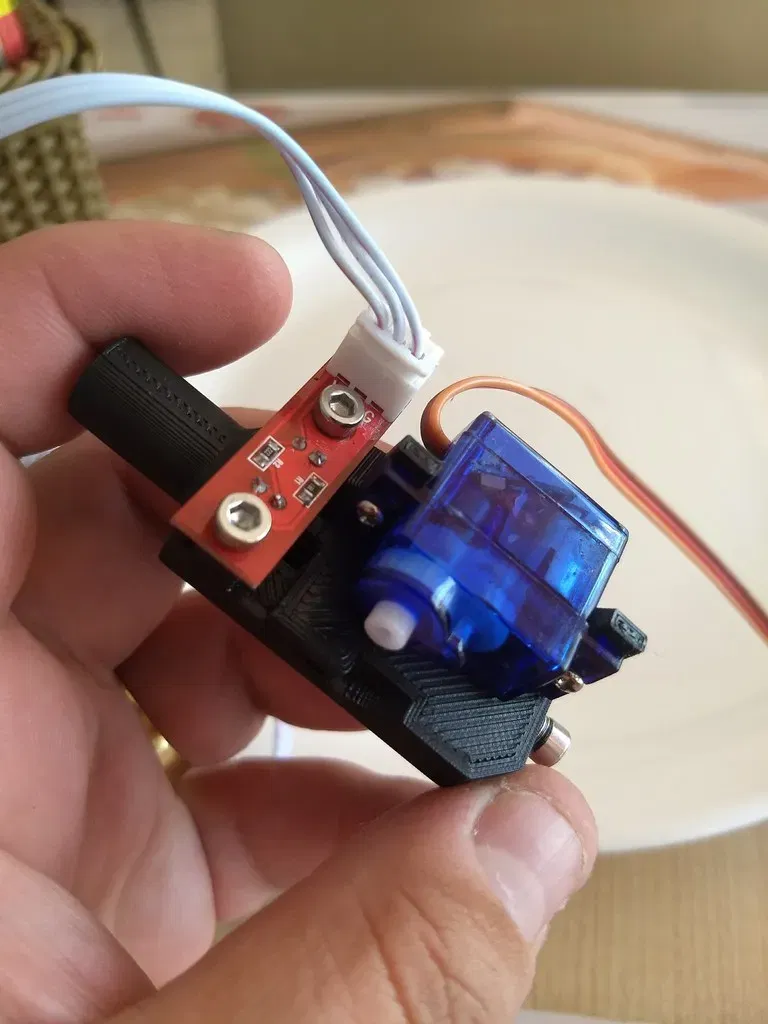
Danh sách vật liệu
Bạn chỉ cần:
- 1x Servo Micro (ví dụ: TowerPro SG90)
- 1x Cảm biến quang học TCST2103 (Tiêu chuẩn RepRap)
- 2x M3x10 để cố định cảm biến quang học.
- 1x M3x30 làm đầu dò
- 2x vít tự cắt (2x8) để cố định servo
- 1x lò xo bút quà rẻ tiền sản xuất tại Trung Quốc phù hợp với vít M3x30.
- Một số cáp 4 dây**
** Tôi thích sử dụng cáp USB cũ cho việc này! Rất phổ biến để có micro USB bị hỏng do sử dụng nên cáp vẫn tốt, linh hoạt, được bảo vệ và có màu sắc đẹp và tiêu chuẩn. Sử dụng đen và đỏ cho nguồn và hai cái còn lại cho mỗi tín hiệu :D.
Hướng dẫn
Đây là video hướng dẫn tuyệt vời hoàn chỉnh với cấu hình Marlin: https://youtu.be/bhuslm04Cus
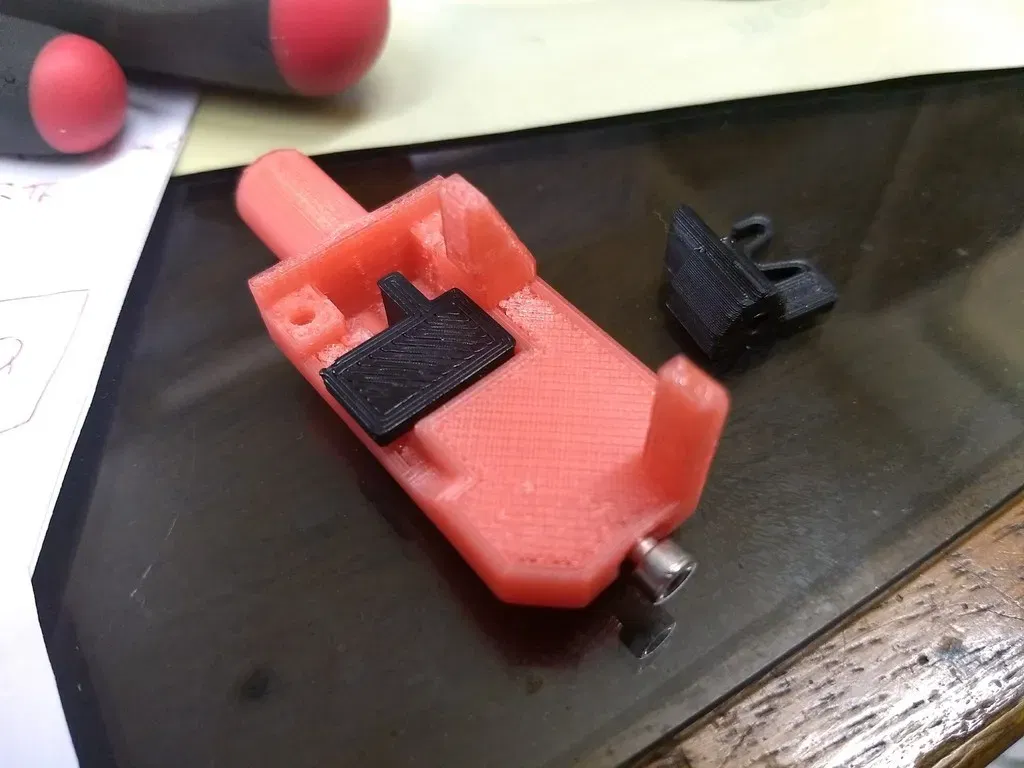
- In các bộ phận Chính và Cờ (cờ PHẢI màu đen hoặc sơn màu đen!) và kiểm tra xem cờ có di chuyển tự do không.
- Đặt lò xo (cắt khoảng 10mm dài) vào M3x30 và vặn nó vào cờ gắn trên Chính cho đến khi đầu vít bằng phẳng với cờ ở vị trí cao nhất.
- Nó cần phải mềm nhất có thể! Gắn vào máy in của bạn và ấn tay 2.5mm vào đầu dò để kiểm tra xem nó có làm di chuyển thân cảm biến hoặc giàn không. Nếu bạn nhận thấy một chút chuyển động, hãy giảm lò xo và kéo dài nó;
- Vặn cảm biến quang học và servo.
- Cắt độ dài của tay gạt servo hoặc in một trong các tùy chọn có sẵn ở đây (của tôi phù hợp hơn với phiên bản có đường kính trong 4.5mm).
- Đừng gắn nó ngay bây giờ! Bạn cần cấu hình hành trình của servo một cách cẩn thận trước khi gắn nó!
- Tôi đã sử dụng #define Z_SERVO_ANGLES {200,127} nhưng bạn PHẢI kiểm tra nó với servo của bạn. 200 là hành trình tối đa, khi được triển khai, và 173 là khi thu lại.
- Cấu hình firmware của bạn.
- Nếu bạn sử dụng Marlin, tôi khuyên bạn nên làm theo hướng dẫn của Robscar Thing vì chúng rất tuyệt!
Quan trọng: NẾU BẠN SỬ DỤNG RAMPS, BẠN SẼ CẦN MỘT NGUỒN 5V NGOÀI BỞI VÌ ARDUINO KHÔNG THỂ XỬ LÝ DÒNG ĐIỆN CỦA SERVO. Tôi đang sử dụng cùng một UBEC mà tôi sử dụng để cấp nguồn cho Raspberry Pi. Tất cả đều có chung mặt đất!
- Nếu bạn sử dụng Marlin, tôi khuyên bạn nên làm theo hướng dẫn của Robscar Thing vì chúng rất tuyệt!
Hướng dẫn cho Duet Ethernet hoặc Wifi
-
Kết nối với GRD, +5v (chân 1 và 2 của đầu nối mở rộng) để cung cấp điện cho servo và cảm biến quang. HÃY CẨN THẬN VÌ ĐẦU RA CẢM BIẾN CỦA BẠN BÂY GIỜ LÀ 5V VÀ KHÔNG THỂ KẾT NỐI VỚI Z_STOP. Kết nối tín hiệu servo với chân 31 của đầu nối mở rộng (HEATER7) và kết nối dây tín hiệu cảm biến quang của bạn với chân Z_PROBE_IN.
-
Tại config.g:
- ; Z-Probe
M307 H7 A-1 C-1 D-1 ; Vô hiệu hóa Heater 7 M574 Z1 S2 ; Đặt endstops được điều khiển bởi probe M558 P5 H5 F120 T8000 ; Đặt loại Z probe thành switch và chiều cao + tốc độ lặn G31 P600 X30 Y0 Z0.217 ; Đặt giá trị kích hoạt Z probe, độ lệch và chiều cao kích hoạt M557 X47:285 Y5:280 S20 ; Định nghĩa lưới mesh. Độ lệch sẽ được điều chỉnh sau. Lưới mesh được sử dụng bởi G29 và bạn cần sửa đổi cho kích thước và loại giường của bạn.
-
Định nghĩa các điểm cho G32 (bạn sẽ sử dụng điều này trong mã gcode khởi động của bạn) trong tệp bed.g của bạn.
-
Cấu hình deployprobe.g và retractprobe.g như sau:
- ; deployprobe.g
M280 P7 S200 I1 ; Triển khai probe KIỂM TRA GIÁ TRỊ GÓC CỦA BẠN G4 P300 ; Chờ 0.3 giây. (điều này sẽ đủ thời gian cho servo mở rộng)
- ; retractprobe.g
M280 P7 S127 I1 ; Rút probe KIỂM TRA GIÁ TRỊ GÓC CỦA BẠN
-
Đừng quên cấu hình HomeX và HomeY để hạ giường trước khi di chuyển và HomeZ và HomeAll để gửi đầu in đến trung tâm của giường và triển khai probe trước khi homing Z.
Cũng như nhà Z CẦN SỬ DỤNG G30 THAY VÌ G1 (bài học khó khăn :D) Dưới đây là các tệp Home*.g của tôi để tham khảo:
-
; homex.g
; gọi để về nhà trục X G91 ; định vị tương đối G1 Z5 F4000 S2 ; nâng Z tương đối với vị trí hiện tại G1 S1 X-305 F3600 ; di chuyển nhanh đến điểm dừng trục X và dừng lại ở đó (lần đầu) G1 X5 F3600 ; quay lại vài mm G1 S1 X-305 F1800 ; di chuyển chậm đến điểm dừng trục X một lần nữa (lần thứ hai) G1 Z-5 F4000 S2 ; hạ Z một lần nữa
-
; homey.g
; gọi để về nhà trục Y G91 ; định vị tương đối G1 Z5 F4000 S2 ; nâng Z tương đối với vị trí hiện tại G1 S1 Y-285 F3600 ; di chuyển nhanh đến điểm dừng trục Y và dừng lại ở đó (lần đầu) G1 Y5 F4000 ; quay lại vài mm G1 S1 Y-285 F180 ; di chuyển chậm đến điểm dừng trục Y một lần nữa (lần thứ hai) G1 Z-5 F4000 S2 ; hạ Z một lần nữa G90 ; định vị tuyệt đối
-
; homez.g
G91 ; định vị tương đối G1 Z5 F4000 S2 ; nâng Z tương đối với vị trí hiện tại G90 ; định vị tuyệt đối G0 S0 X119 Y140 F4000 ; di chuyển đến trung tâm của bàn G30 ; di chuyển Z xuống cho đến khi công tắc kích hoạt (lần đầu) G1 Z5 F1800 ; quay lại vài mm G30 ; di chuyển Z xuống cho đến khi công tắc kích hoạt (lần thứ hai) G1 Z10 F1800 S2 ; nâng Z tương đối với vị trí hiện tại G90 ; định vị tuyệt đối
-
; homeall.g
; gọi để về nhà tất cả các trục G91 ; định vị tương đối G1 Z5 F6000 S2 ; nâng Z tương đối với vị trí hiện tại ;==============Về nhà X==================== G1 S1 X-305 F4000 ; di chuyển nhanh đến điểm dừng trục X và dừng lại ở đó (lần đầu) G1 X5 F6000 ; quay lại vài mm G1 S1 X-305 F180 ; di chuyển chậm đến điểm dừng trục X một lần nữa (lần thứ hai) ;==============Về nhà Y==================== G1 S1 Y-285 F4000 ; di chuyển nhanh đến điểm dừng trục Y và dừng lại ở đó (lần đầu) G1 Y5 F6000 ; quay lại vài mm G1 S1 Y-285 F180 ; di chuyển chậm đến điểm dừng trục Y một lần nữa (lần thứ hai) ;==============Về nhà Z==================== G90 ; định vị tuyệt đối G0 X119 Y140 F4000 ; di chuyển đến trung tâm của bàn G91 ; định vị tương đối G30 ; di chuyển Z xuống cho đến khi công tắc kích hoạt (lần đầu) G1 Z5 F1800 ; quay lại vài mm G30 ; di chuyển Z xuống cho đến khi công tắc kích hoạt (lần thứ hai) G1 Z10 F1800 S2 ; nâng Z tương đối với vị trí hiện tại G90 ; định vị tuyệt đối
Sau đó, làm theo hướng dẫn này để kiểm tra và hiệu chỉnh độ bù của bạn: Kiểm tra và hiệu chỉnh một cảm biến Z
7. Sau đó, gửi lệnh G29 để đo và lưu lưới của bạn và sử dụng G32 trong mã gcode khởi động của bạn để nó đưa tất cả các trục về vị trí gốc, đo độ nghiêng và bù đắp bằng lưới.
ĐẢM BẢO RẰNG ĐỘNG CƠ, GIƯỜNG VÀ KHUNG CỦA BẠN ĐỀU ĐƯỢC ĐẤT! Tôi đã gặp vấn đề với việc tĩnh điện do filament và/hoặc dây đai. Điều này khiến servo bị giật và mất vị trí. Và cũng có thể làm hỏng bo mạch của bạn :D
Và đó là tất cả!
Hướng dẫn cho firmware Klipper bởi kingfisher
ps.: Có một nhu cầu thực sự để làm quen với tài liệu hỗ trợ của probe support documents trước khi những hướng dẫn này có ý nghĩa!
Dưới đây là một đoạn mã mẫu để thêm vào cấu hình:
[servo BFPTouch]
set pin to the pin that the BFPTouch servo is connected to.
pin: ar4
initial_angle: 0
enable: True
maximum_servo_angle = 90
minimum_pulse_width = 0.001
maximum_pulse_width = 0.002
Định nghĩa một probe sử dụng BFPTouch
[probe]
pin: ^ar18
speed: 5.0
z_offset: 1.0
activate_gcode:
SET_SERVO SERVO=BFPTouch ENABLE=1
SET_SERVO SERVO=BFPTouch ANGLE=45
G4 P300
deactivate_gcode:
SET_SERVO SERVO=BFPTouch ANGLE=5
SET_SERVO SERVO=BFPTouch ENABLE=0
Hướng dẫn cho một skr v1.4 trên Ender3 của tôi sử dụng firmware Klipper bởi Kofferkulli (08/08/2021)
[servo BFPTouch]
pin: P2.0
initial_angle: 131
maximum_servo_angle = 180
minimum_pulse_width = 0.0005
maximum_pulse_width = 0.0024
[probe]
pin: P1.27 #sử dụng pin z-endstop
x_offset: -42
y_offset: -16
z_offset: 0.77
speed: 3.0
samples: 2
activate_gcode:
SET_SERVO SERVO=BFPTouch ANGLE=180
G4 P300
deactivate_gcode:
SET_SERVO SERVO=BFPTouch ANGLE=131
Mọi người phải xác định góc servo và độ lệch probe của riêng mình, nhưng có thể điều này sẽ giúp ai đó khi thiết lập Klipper với BFPTouch.
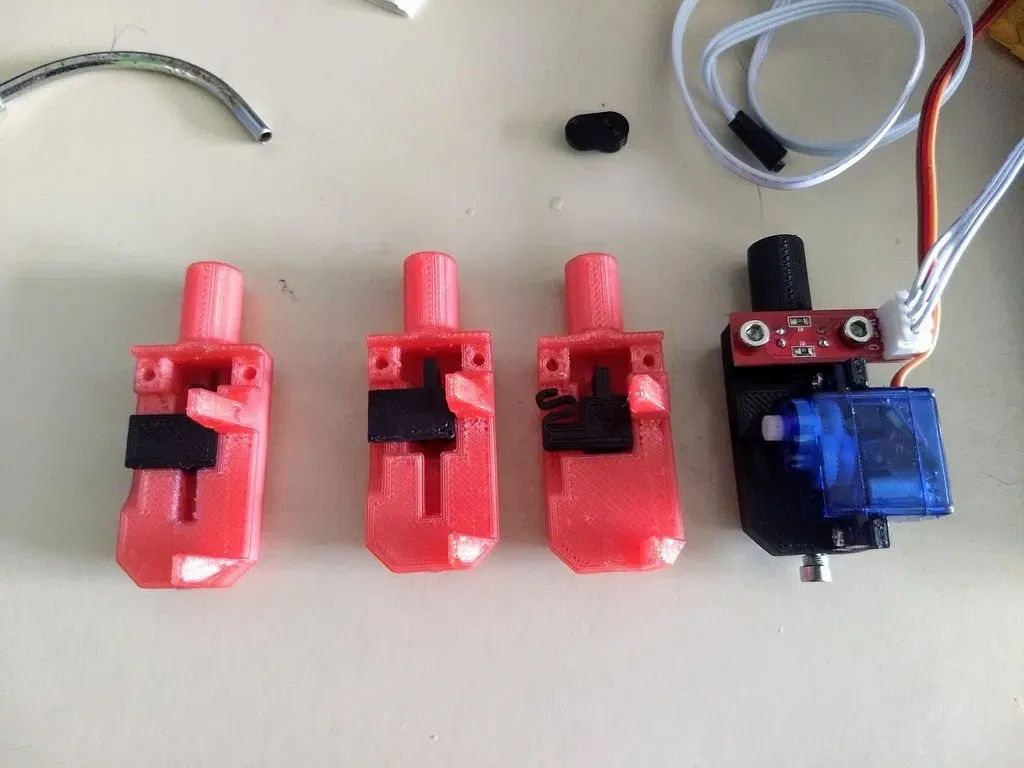
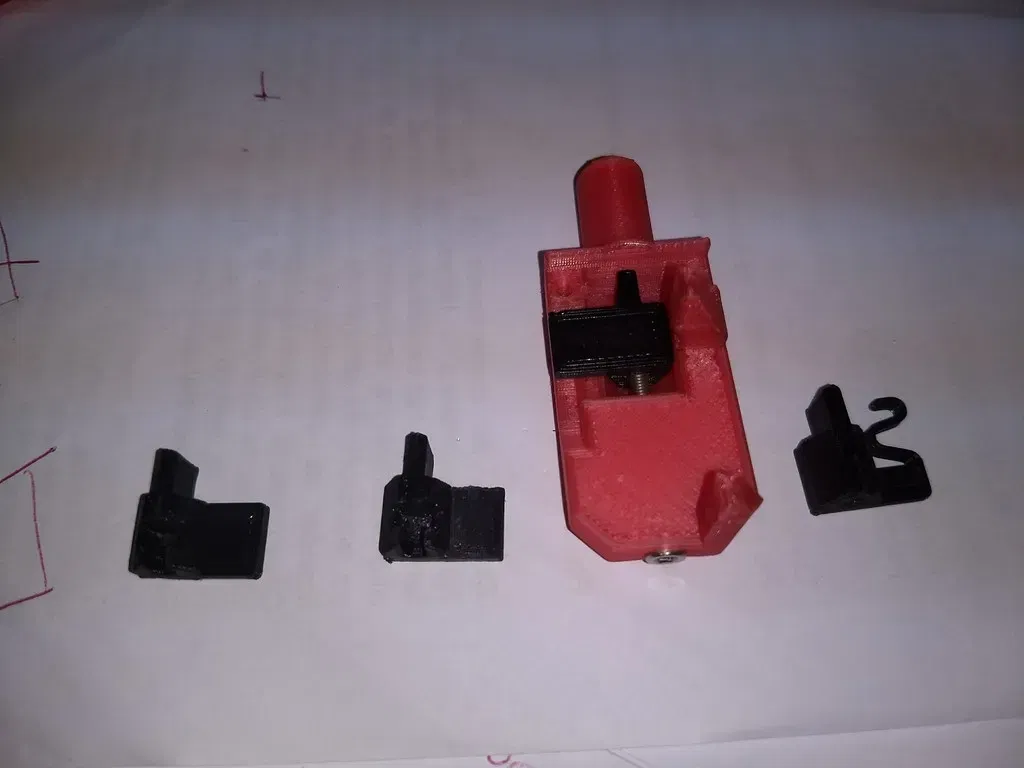
Lịch sử phát triển
Một số bức ảnh là từ các phiên bản thiết kế cũ hơn. Đầu tiên, tôi dựa vào trọng lực để thả đầu dò. Sau đó, tôi đã thử một thiết kế lò xo in (mà không thành công...) và M3x30 đã được gắn vào cờ với đầu được chèn vào đó. Bạn có thể thấy trên Mk1 rằng tôi đã cắt một kênh để có thể gắn vít vào......:D Sau đó, tôi quyết định đảo ngược M3x30 và vặn nó trực tiếp vào cờ. Và sửa đổi cuối cùng là thêm không gian cho lò xo như một cơ chế thả. Trong những lần lặp này, tôi cũng đã điều chỉnh một số thông số.
Cài đặt In
Máy in:
Hypercube Evolution
Bệ:
Không
Hỗ trợ:
Có
Độ phân giải:
0.2
Đổ đầy:
50% Hình chữ nhật
Ghi chú:
Tốt nhất là in bằng PETG nhưng bạn có thể làm bằng ABS hoặc bất kỳ vật liệu chịu nhiệt độ cao nào khác. Tôi chỉ sử dụng hỗ trợ ở đầu "bộ chuyển đổi đầu dò cảm ứng" mà có sẵn như là thân tham chiếu. VUI LÒNG HỎI TÔI VỀ CÁC SỬA ĐỔI ĐỂ PHÙ HỢP VỚI MÁY IN CỦA BẠN.
Sau khi In
Mài cờ và làm sạch các kênh chính nếu cần. Cẩn thận khi vặn vì các ren nhựa rất mỏng manh. Nếu bạn muốn an toàn hơn với đầu dò, hãy thêm một ít keo CA vào lỗ M3x30 trên cờ trước khi vặn vào.
Bộ chuyển đổi
Petsfang v2 gắn Ender 3Gắn cảm biến BFPTouch cho Ender 3 và CR10FLSun I3 Plus Autolevel cho Đầu dò DIY [fvergniaud
BFPTOUCH cho Hipercubo-AR](https://www.thingiverse.com/thing:3158589) Cảm biến BFPTouch AS Hero V3
Cập nhật
CẬP NHẬT 08/05/2018:
ĐẢM BẢO RẰNG CÁC ĐỘNG CƠ, GIƯỜNG VÀ KHUNG CỦA BẠN ĐỀU ĐƯỢC TIẾP ĐẤT! Tích tụ điện tĩnh và làm cho servo trở nên điên cuồng :D
CẬP NHẬT 11/05/2018:
Hoạt động hoàn hảo kể từ đó. Tôi sẽ thử Mesh hoặc UBL :D
CẬP NHẬT 14/05/2018:
Lỗi đầu tiên! Lò xo bị tắc vào hướng dẫn vít, ngăn cản đầu dò thả ra đúng cách. Tôi đã đảo ngược vị trí lò xo để đầu cắt hướng về phía đầu của vít nhằm tránh điều này như một giải pháp tạm thời. Tôi sẽ thay đổi thiết kế để thêm một vòng đệm M3 bên trong để tăng cường tiếp xúc của lò xo với phần in nhằm tránh các lỗi trong tương lai.
CẬP NHẬT 17/05/2018:
Đã thêm một khe vòng đệm M3 để tránh các vấn đề về lò xo.HÃY LƯU Ý RẰNG PHIÊN BẢN R1 NÀY VẪN ĐANG TRONG QUÁ TRÌNH PHÁT TRIỂN. Nguyên mẫu in R1 đầu tiên không tốt :D
Đã cập nhật nắp để nhẹ hơn! (vẫn cần hỗ trợ dưới các vít.)
Đã thêm các tệp bước.
CẬP NHẬT 27/06/2018:
Đã thêm một phiên bản R1 mới nhỏ hơn 1.1mm ở đáy. Đã thêm các phiên bản SLIM mới nhẹ hơn nhiều và sử dụng ít vật liệu hơn. CẢ HAI ĐỀU CHƯA ĐƯỢC KIỂM TRA. Nhưng chúng nên hoạt động. Đã thêm hướng dẫn cho Duet/RepRapFirmware.
CẬP NHẬT 30/07/2018:
3DKyle đã in phiên bản mỏng và gặp vấn đề với việc nó bị gãy ở cổ khi làm sạch các lỗ. Tôi sẽ cố gắng cập nhật nó để tránh vấn đề này càng sớm càng tốt. Vì vậy, bây giờ tôi khuyên bạn không nên in phần này :D
Danh mục: Phụ kiện máy in 3D
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!