Kẹp robot mềm Kirigami

Phiên bản in 3D FDM của kẹp robot mềm Kirigami lấy cảm hứng từ NCSU. Bản in một lớp này cần canh chỉnh lớp đầu cẩn thận, sử dụng cài đặt slicer Classic và tốc độ chậm để có độ bền cao, có thể nhấc vật nặng gấp nhiều lần trọng lượng.





Mô tả
Tui mới đọc về cái kẹp robot mềm lấy cảm hứng từ kirigami do Đại học Bang North Carolina phát triển, và tui muốn làm một phiên bản in 3D FDM để chơi.
Bài báo đầy đủ về cách nó hoạt động được đăng trên Nature nè: https://www.nature.com/articles/s41467-023-39741-6
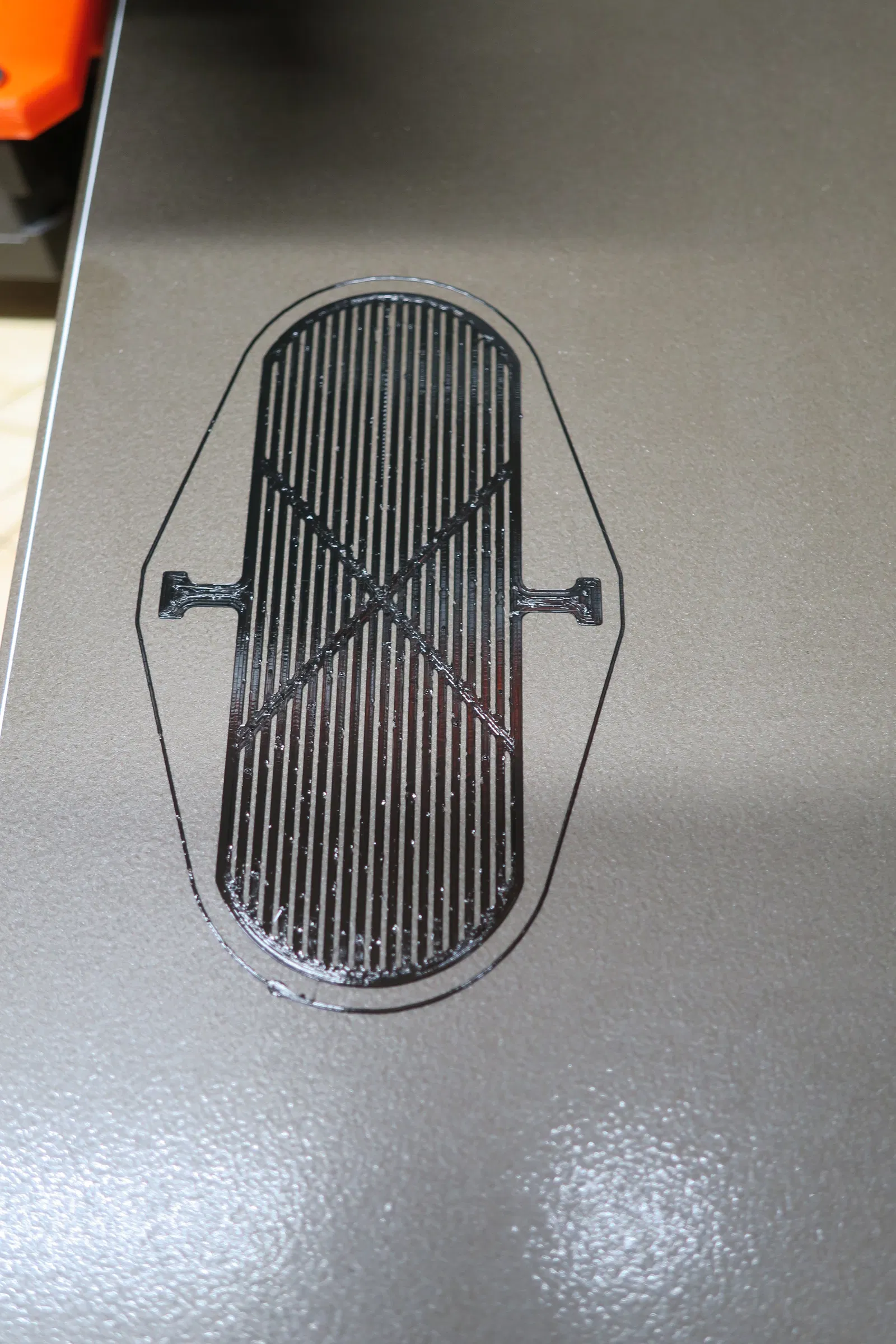
Do bản in chỉ dày có một lớp, nên bạn cần canh chỉnh lớp đầu tiên cho ngon lành, và phải đảm bảo nó dính tốt vô bàn in nha. Tui đã thử in bằng cả PLA và PETG rồi, vì bài báo có nói thiết kế nghiên cứu này được cắt bằng laser từ một tấm PET mỏng (127 micron). Tui không extrude ổn định được với lớp PETG mỏng như vậy, nhưng tui thấy lớp đầu tiên mặc định 0.2 mm (200 micron) là đủ để thử nghiệm với cả PLA và PETG rồi.
Mất công chỉnh sửa nhiều lắm mới làm cho nó slice ngon, in ra đẹp, và không bị gãy liền khi giật hai cái "tai" của nó. Nhưng tui đã tìm ra mấy cài đặt tạo ra sự khác biệt lớn.
Cái slicer Classic xài ngon hơn nhiều so với slicer Arachne, nhất là vì nó tạo ra một lớp infill nhỏ trên mỗi dải băng, hoạt động như là ironing (mà cái này không có trên bản in một lớp). Cái vị trí seam ngẫu nhiên (random seam position) quan trọng cho độ bền, cũng như là làm chậm tốc độ lớp đầu tiên xuống nhiều để đảm bảo mọi thứ kết dính tốt với nhau, vì bạn sẽ phải giật khá mạnh hai cái "tai" để nó kẹp và nhấc vật thể.
Bản in chỉ nặng 0.4 gram, nhưng nó có thể kẹp nhẹ nhàng, và dễ dàng nhấc vật thể nặng gấp nhiều lần trọng lượng của nó.
Cài đặt in đề xuất:
- Chất liệu: PLA hoặc PETG
- Perimeters: 7
- Vị trí Seam: Random
- Perimeter generator: Classic
- Tốc độ lớp đầu tiên: 5mm/s
- Slice gap closing radius: 0mm
- Elephant foot compensation: 0mm
Nếu bạn muốn dùng hết mấy cài đặt này, bạn có thể Mở (không phải Import) file .3mf đính kèm, hoặc dùng file gcode đính kèm cho PLA hoặc PETG nha.
Sau khi in:
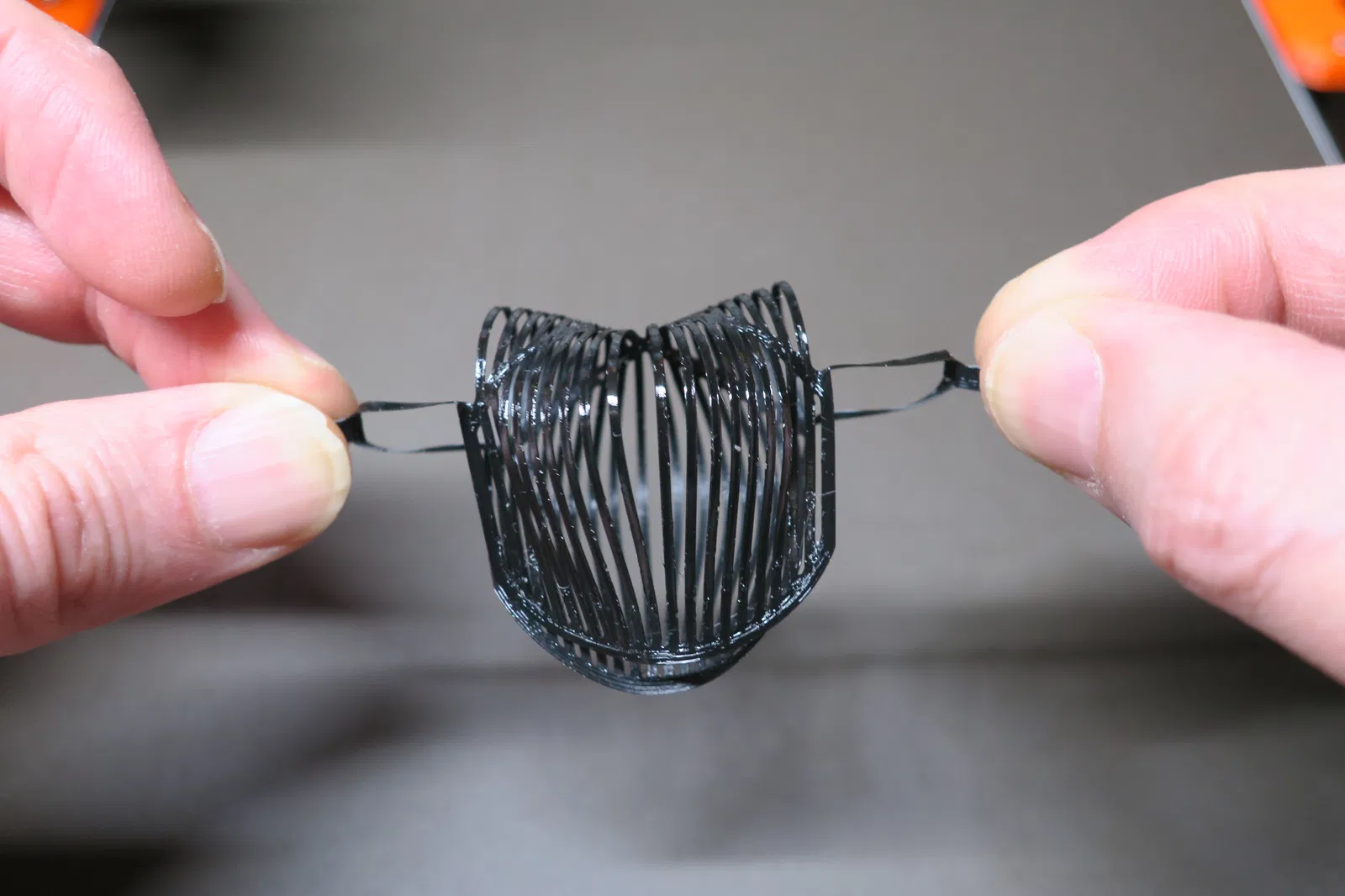
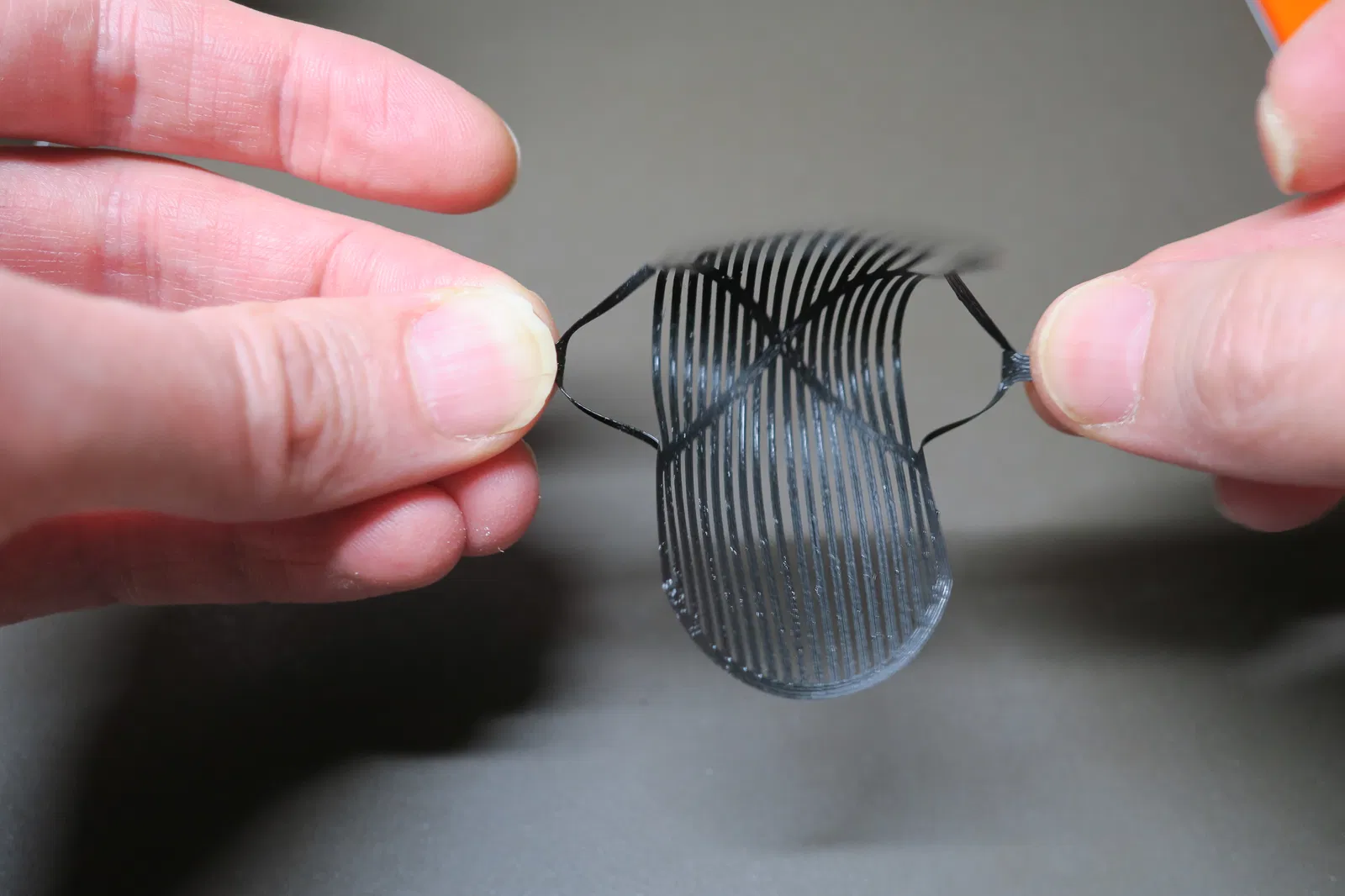
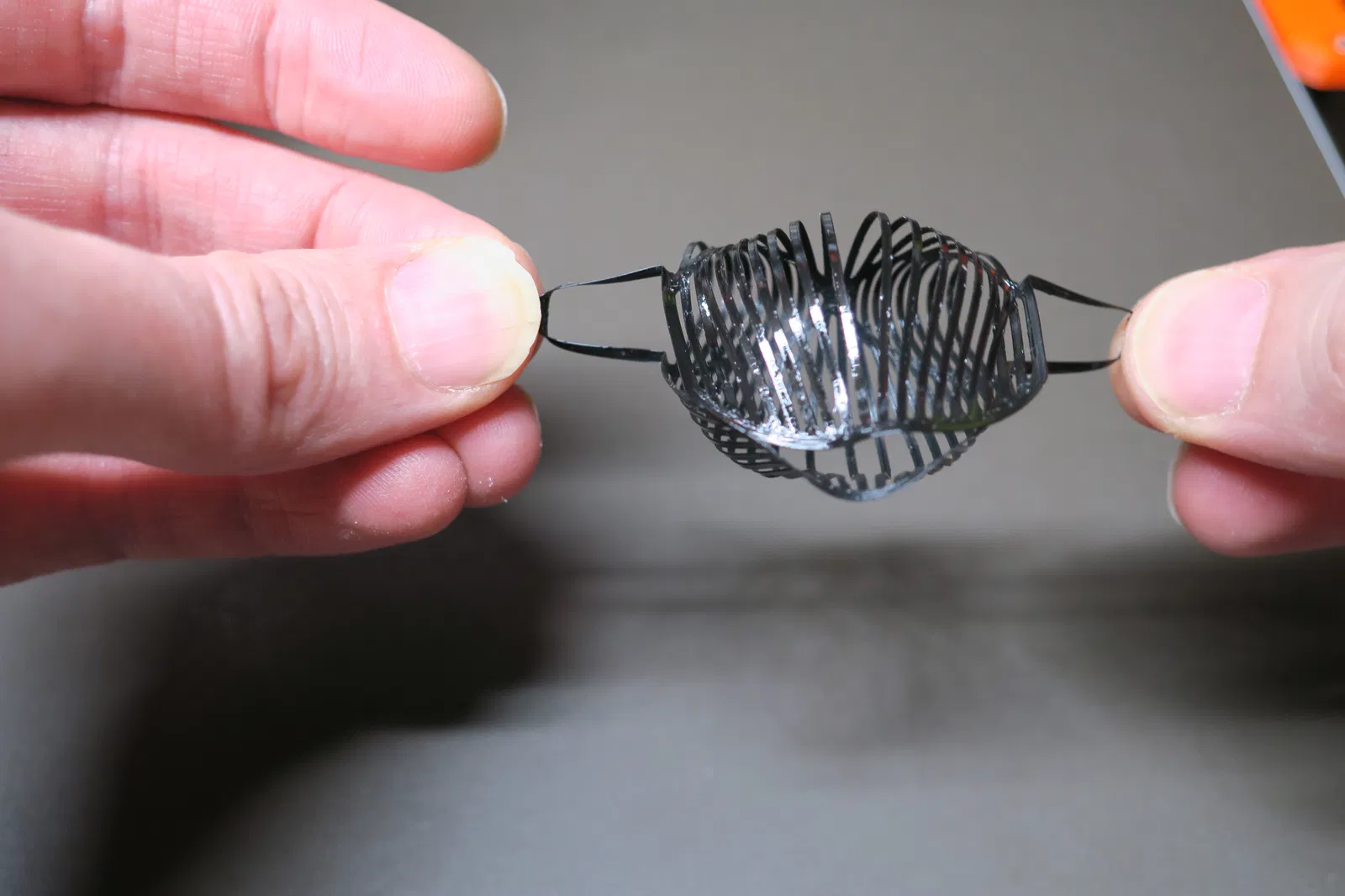
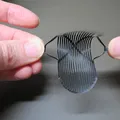
Để nguội bàn in, rồi cẩn thận nhấc nó ra để không bị hư, sau đó từ từ kéo hai cái tai ra để nó cong lại thành hình cái kẹp. Khi bạn thả tai ra, nó sẽ gần như trở về hình dạng ban đầu.
Miễn là bạn làm theo cài đặt in ở trên để có bản in chắc chắn, bạn có thể kéo mạnh hai cái tai để tạo ra biến dạng như trong hình và để kẹp chặt đồ vật.
(Đừng kéo mạnh quá nha, kẻo nó gãy đó!)
Nhớ xem video gốc của NCSU giới thiệu về kẹp của họ được cắt bằng laser nha:
Trích dẫn bài báo:
Hong, Y., Zhao, Y., Berman, J. et al. Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision. Nat Commun 14, 4625 (2023). https://doi.org/10.1038/s41467-023-39741-6
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!