Gimbal Máy ảnh

Gimbal máy ảnh đơn giản cho chụp ảnh timelapse, stop motion hoặc điều khiển chuyển động. Cho phép định vị máy ảnh chính xác, có thể lặp lại vị trí nhờ công tắc Home. Hỗ trợ Nikon D3400/D850, Canon 70D/5DmkIV. Điều khiển bằng Arduino Nano/Grbl và Raspberry Pi. Cần lắp ráp và một số phần cứng bổ sung.





Mô tả
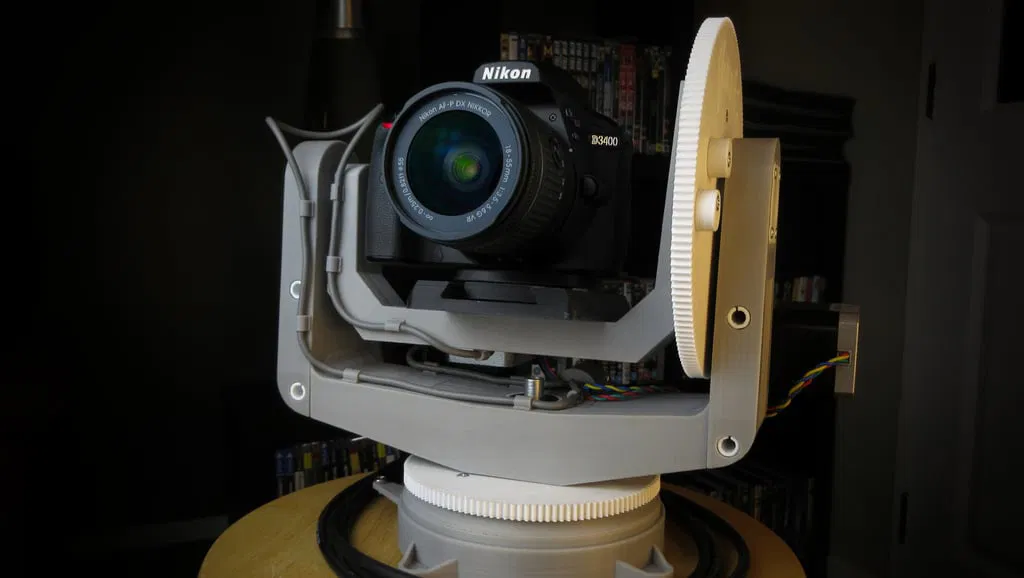
Gimbal máy ảnh đơn giản cho chụp ảnh tua nhanh (timelapse) và stop motion, hoặc điều khiển chuyển động.
Cho phép bạn định vị máy ảnh chính xác theo hai trục hoặc di chuyển qua một chuỗi được lập trình sẵn. Các công tắc Home giúp việc kiểm soát vị trí có thể lặp lại ngay cả khi mất điện.
Máy ảnh được hỗ trợ (theo báo cáo của người tạo): Nikon D3400, D850; Canon 70D, 5DmkIV
Tôi đang điều khiển Gimbal của mình bằng Arduino Nano chạy Grbl (phần mềm điều khiển CNC miễn phí) và Raspberry Pi làm thiết bị đầu cuối để gửi G-code tới nó.
Cần lắp ráp.
Yêu cầu phần cứng bổ sung
Các thành phần điều khiển chuyển động
- 2x Động cơ bước Nema 17 (có thể lấy từ máy in 3D cũ)
- 2x Trình điều khiển bước
- Điện tử điều khiển chuyển động (Arduino, bo mạch chủ máy in 3D cũ, v.v.)
- 2x Cảm biến tiệm cận cảm ứng loại M12 (tùy chọn, ví dụ: LJ12L3-4-Z/BX)
- 3x Giắc cắm ổ cắm Mini XLR (tùy chọn, để quản lý cáp gọn gàng)
Phần cứng và ốc vít
- 4x Vòng bi kiểu 6000, (Đường kính trong 10mm, Đường kính ngoài 26mm, Rộng 8mm)
- Ống Ø10x85mm (ví dụ: nhôm)
- 2x Bánh răng thẳng kim loại, có trục, module 1, T16 (nâng cấp tùy chọn, nhưng rất đáng giá)
- 2x Vít máy đầu lục giác M5x16
- 7x Vít tự khoan, đầu chìm, cỡ № 5, dài ½" (3x12mm)
- 10x Vít tự khoan, đầu chìm, cỡ № 5, dài ¼" (3x6mm)
- 11x Vít tự khoan, đầu tròn, cỡ № 5, dài ¼" (3x6mm)
- 4x Vít tự khoan, đầu tròn, cỡ № 5, dài ¾" (3x19mm, ngàm cam)
- 2x Vít tự khoan, đầu pan, cỡ № 3, dài ¼" (2.5x6mm)
- 4x Vít định vị M3 (cho bánh răng truyền động bằng nhựa và ngàm cam)
- Vòng đệm các loại
In
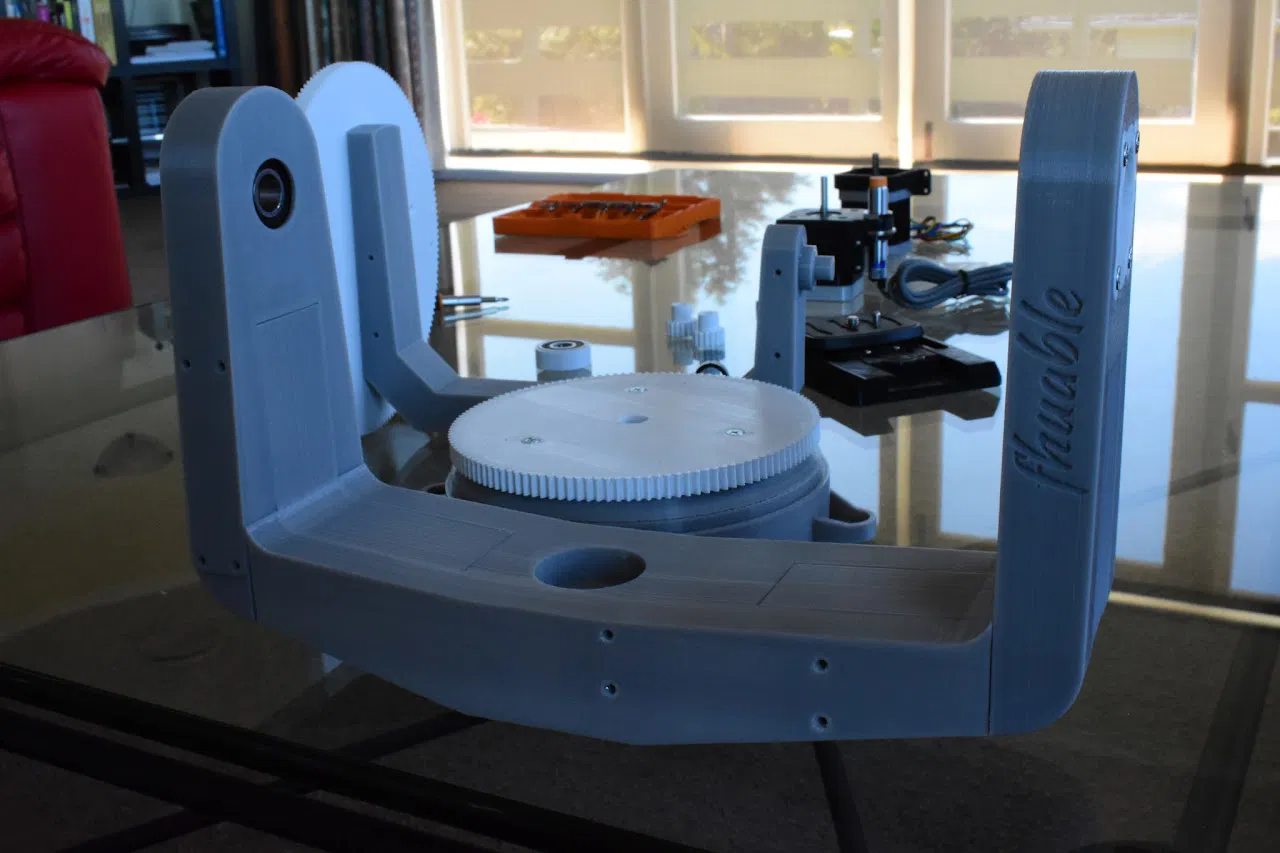
Hầu hết các bộ phận đều có thể in mà không cần hỗ trợ (ngoại trừ cableJunction và motorMountA). Một số bộ phận lớn hơn có thể hưởng lợi từ viền nhỏ (brim), tùy thuộc vào thiết lập in của bạn.
Tôi đã in hầu hết các bộ phận kết cấu với độ dày thành 2mm và mặt trên/dưới 1mm để đạt được độ cứng mong muốn. Điều này có thể được điều chỉnh tùy theo yêu cầu và ứng dụng của bạn.
Lắp ráp
Sử dụng keo epoxy tốt để nối các bộ phận được in nhiều mảnh. (Mẹo: để lại một hoặc cả hai cánh tay không dán để dễ lắp ráp)
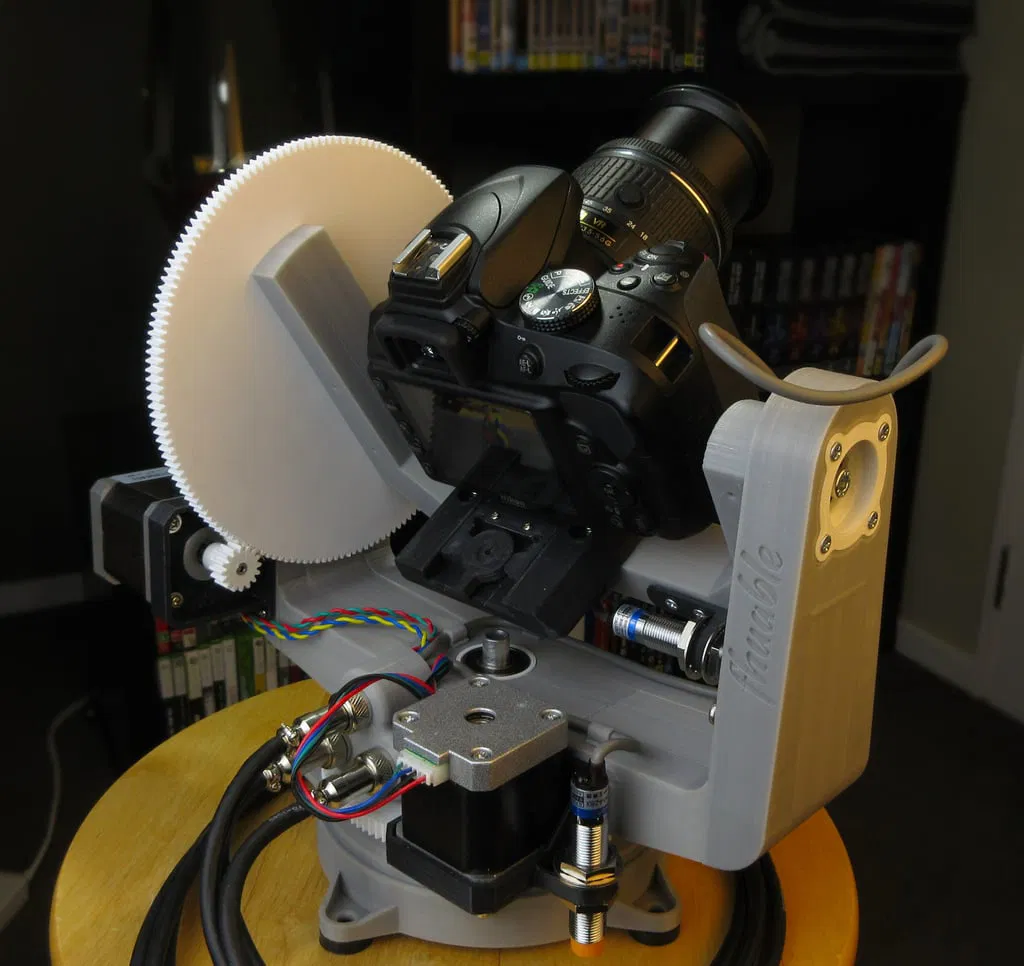
Các bánh răng truyền động nhỏ, bằng nhựa (SpurGearM1x16) hoạt động được nhưng không bền lắm, ít nhất là với PLA, lực tác động lên chúng khá mạnh. Chúng sẽ giúp bạn bắt đầu nhưng các phiên bản kim loại của chúng có thể mua rất rẻ từ Trung Quốc/Ebay (tìm kiếm bánh răng M1T16). Tôi đã thay thế chúng sau một thời gian và nó hoạt động rất tốt kể từ đó.
Ban đầu, thiết bị này được thiết kế để vừa với D3400 của tôi với các dây cáp lòi ra. Tôi không có máy ảnh full-frame nên không chắc các mẫu máy ảnh khác có vừa không. Hãy cho tôi biết nếu máy ảnh của bạn vừa và đó là mẫu nào.
Chúc vui! Và cho chúng tôi biết những điều thú vị bạn làm được với nó.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình





























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!