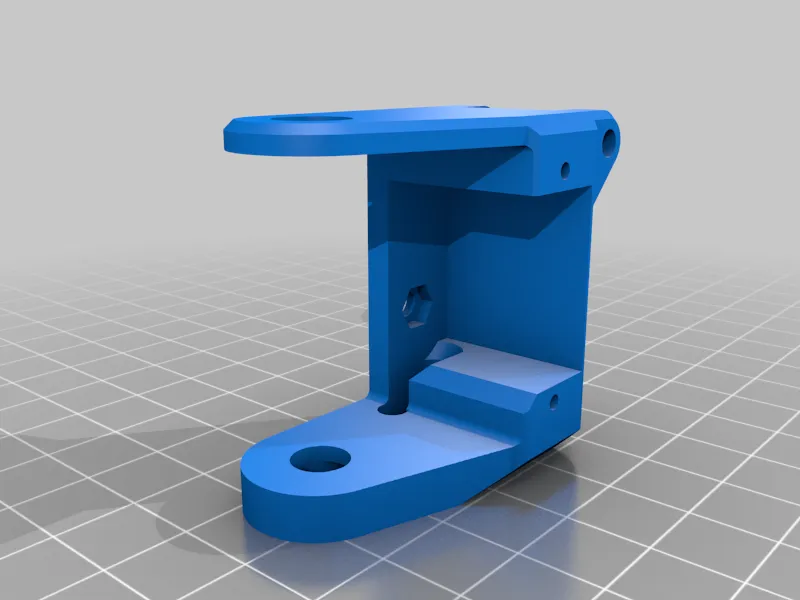
Mô hình đầu robot cho servo Tower Pro MG92B
Thật không may, các động cơ Turnigy, điều này dựa trên không còn được sản xuất. Đây là nỗ lực của tôi để làm lại nó cho


Mô tả
Rất tiếc, các servo Turnigy mà điều này dựa vào hiện không còn được sản xuất. Đây là nỗ lực của tôi để làm lại nó cho các servo Tower Pro MG92B, có mô-men xoắn và tốc độ tương tự khi chạy ở 6v với các loại Turnigy.
Tôi đã chọn sử dụng một SG90 để xoay đầu. Tôi có một số cái nằm xung quanh và tôi thích có nhiều MG92B hơn là SG90.
Tôi thực sự dự định xây dựng một iOlly của Erik Lely, nhưng các chân thì giống nhau. Chúng chỉ có bàn chân khác nhau. Bạn có thể tìm thấy nó ở đây: https://youtu.be/w9p7EhE4V5E
Tiến độ:
20211222
Mở rộng khoang gắn servo để phù hợp với chiều dài thêm của servo
Thay đổi mẫu lỗ vít gắn
Đặt lại kênh cáp
Thay đổi kích thước khoang đầu servo
20211225
Tiếp tục làm lại giá đỡ. Thêm khoang đai ốc m3 trở lại và điều chỉnh vị trí servo.
Làm lại liên kết dưới để có một khoang sâu hơn và phù hợp với giá đỡ mở rộng
Thay đổi kích thước khoang đầu servo liên kết dưới.
Cập nhật lỗ gắn cho BodyBottom và làm sạch hình học nội bộ kỳ lạ
Sao chép hoàn toàn Đế Đầu vì tôi không thể làm lại nó
Điều chỉnh Đế Đầu để phù hợp với SG90 và hạ nó xuống để che phủ nhiều hơn servo
Thêm một phần mỏng cần được cắt bằng tay thành các phím để làm sạch servo khi đầu xoay.
20211226
Loại bỏ lỗ bu lông từ trên cùng của nắp đầu để có thể lắp vít tự khoan từ bên dưới
Cài đặt In
Máy in:
Custom CoreXY
Raft:
Giấy phép

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!