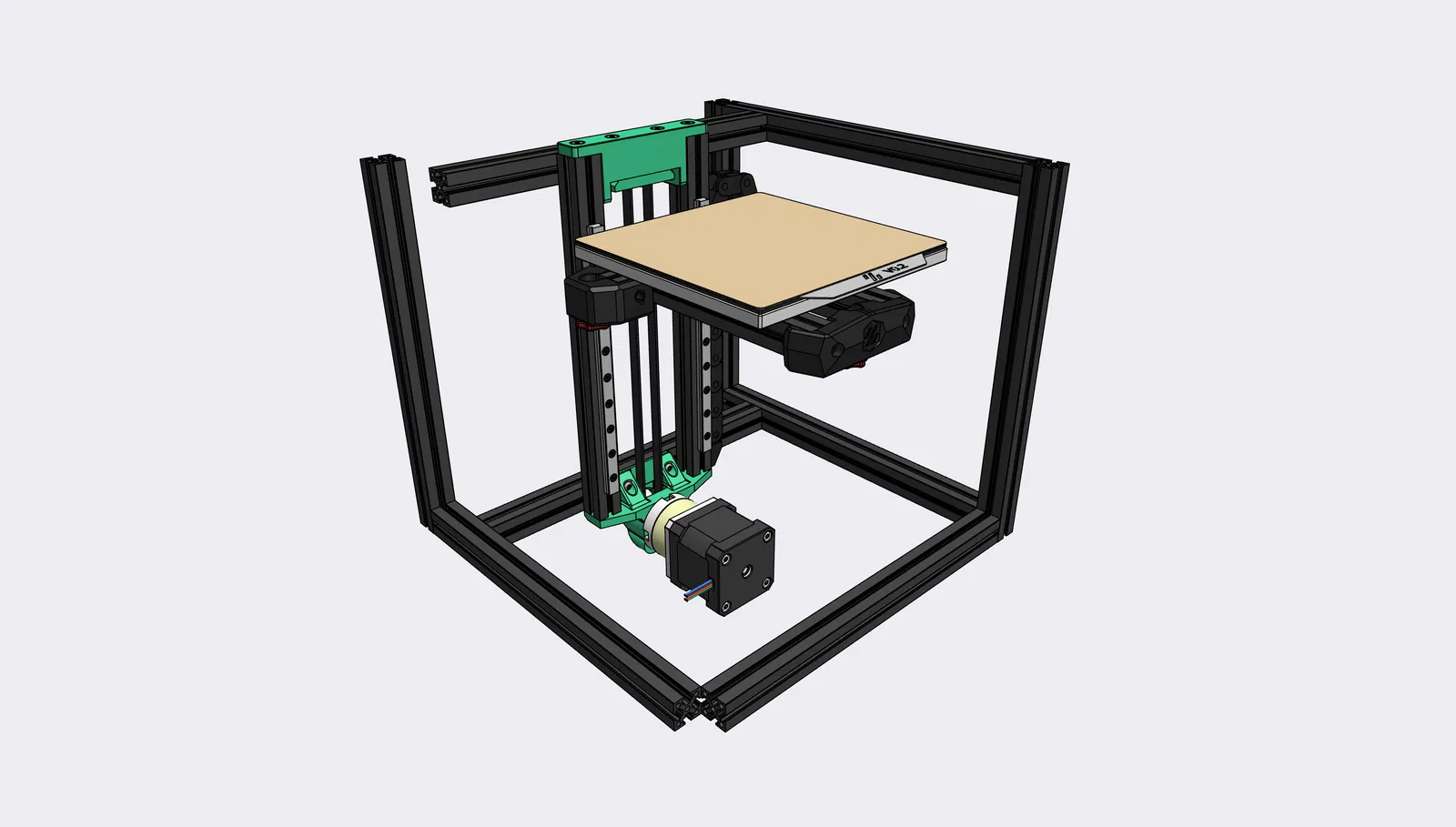
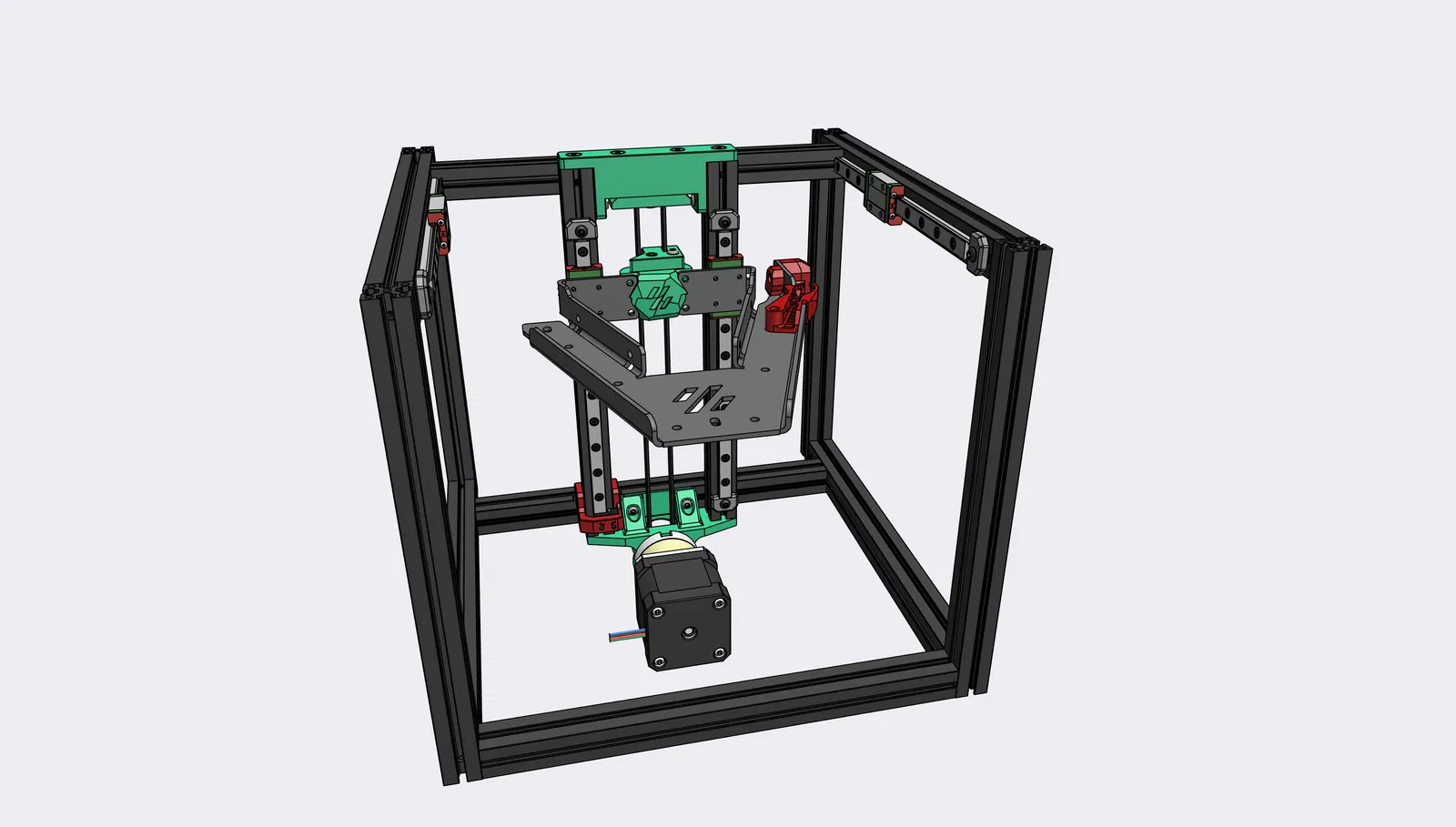
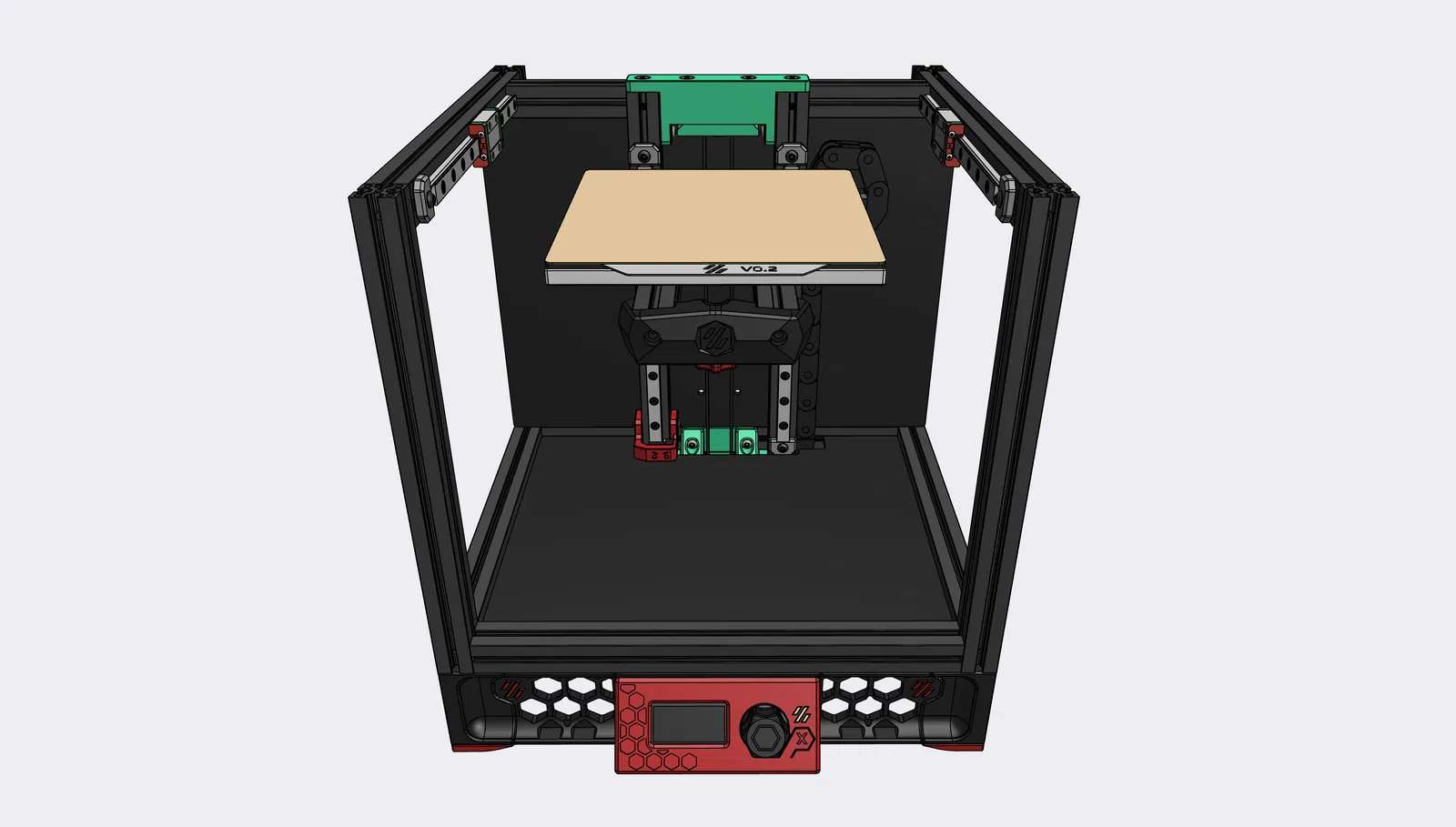
Voron0.2 Dẫn động Z bằng Dây đai - Dùng motor Stepper có bánh răng (Mạnh mẽ)
Mod dẫn động Z đơn giản, dễ làm và mạnh mẽ cho Voron0.2, sử dụng motor stepper NEMA17 có bánh răng. Hỗ trợ bàn in stock và Kirigami. Tăng cường khả năng in với dây đai và motor mạnh mẽ.











Mô tả
Nhìn video nè - chuyển layer nhanh lắm luôn khi in nha!
Cập nhật mới nhất: Mình đã up file STEP. Bạn nào cần thì cứ lấy ra xài để lắp ráp cho dễ nha.
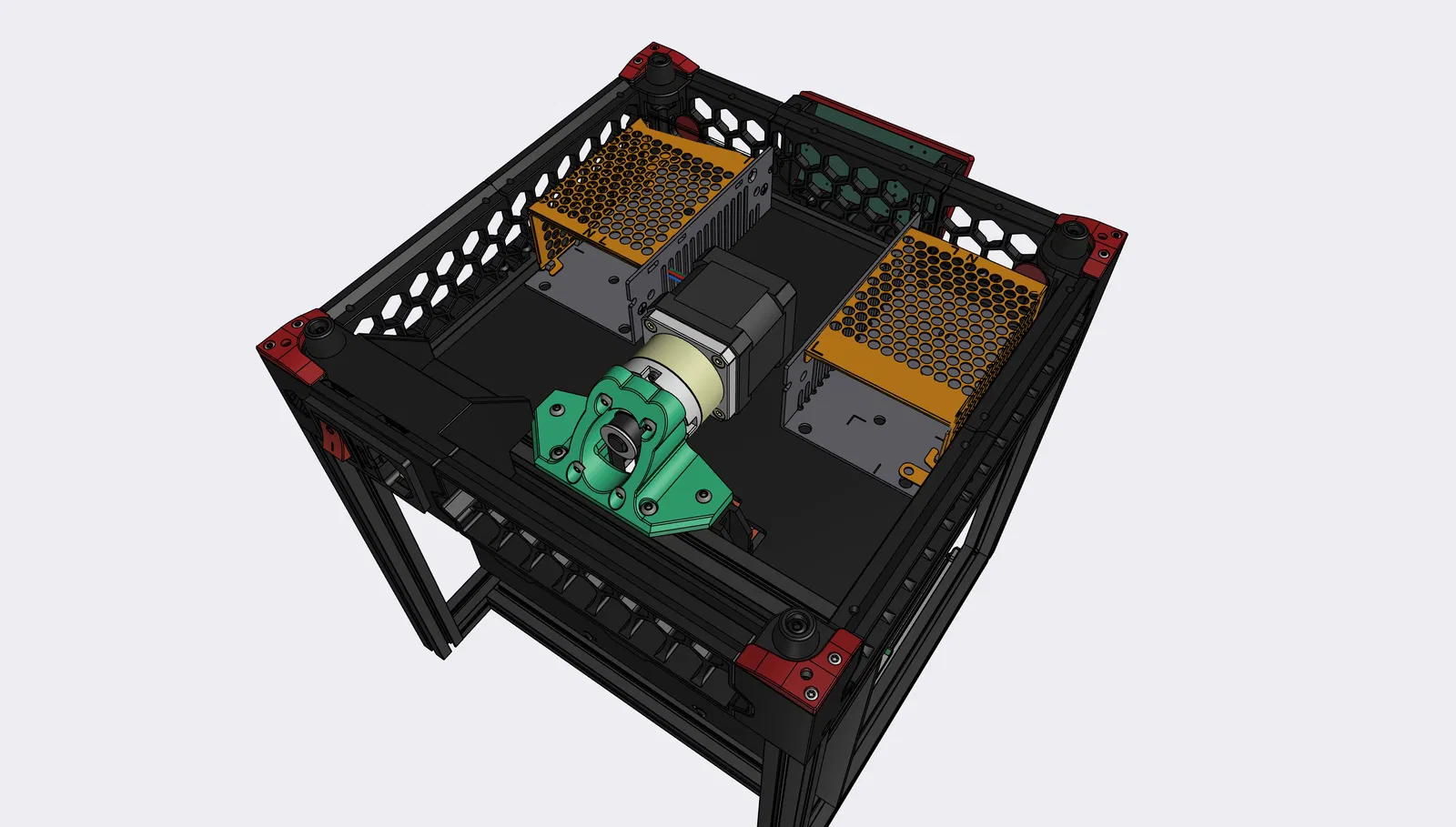
Lưu ý là mod này có thể yêu cầu bạn xài bộ nguồn (PSU) khác, ví dụ như Mornsun LOF225 do vị trí của motor stepper có bánh răng. Nếu xài LOF225 thì có thể gắn 2 bộ nguồn để chạy motor với điện áp cao (48V hoặc 55V). Bản mod đầy đủ có ở đây.
BOM:
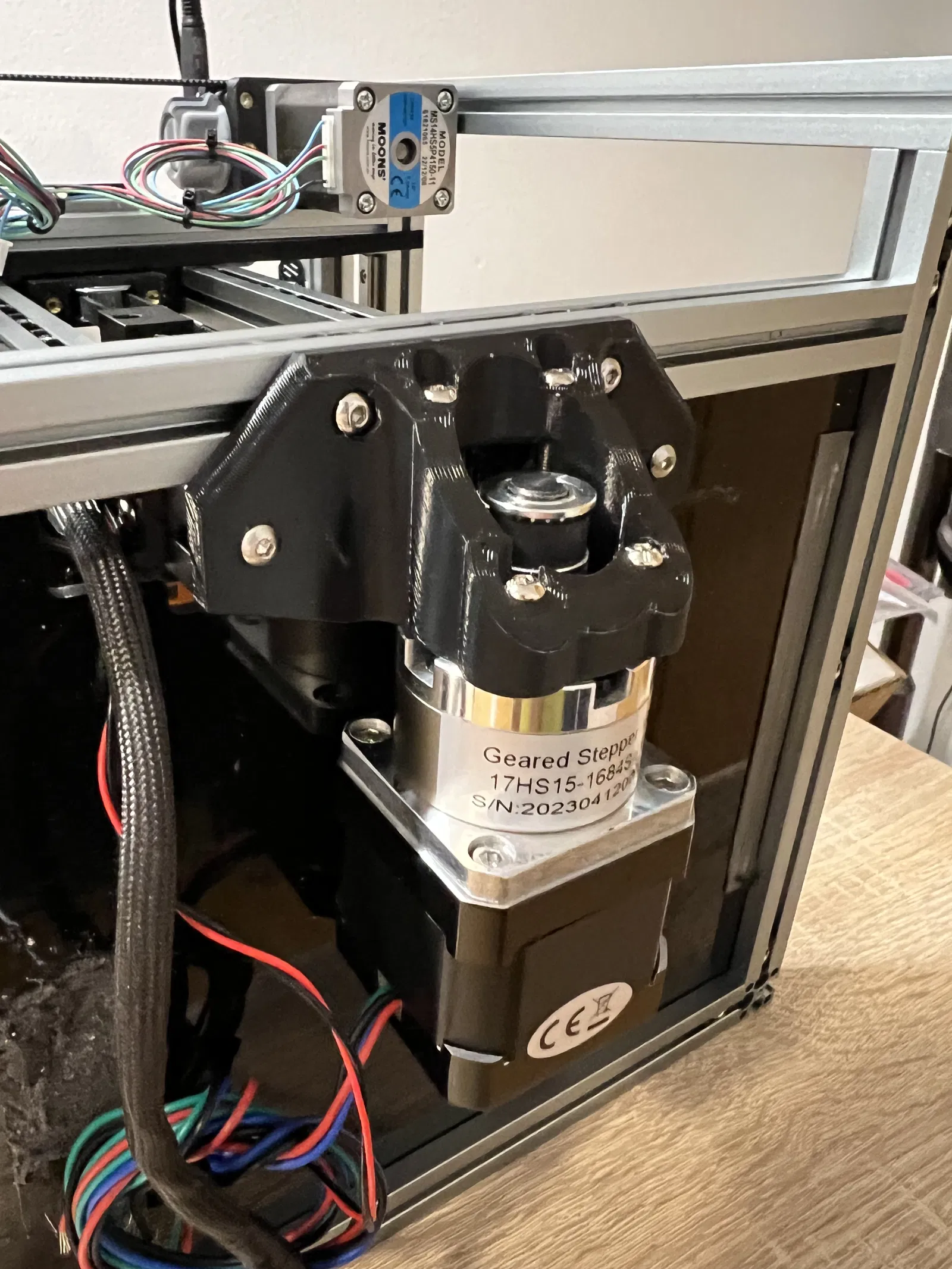
- 1x Motor stepper NEMA17 có bánh răng như 17HS15-1684S-PG5 (bất kỳ motor stepper có bánh răng với lỗ lắp y chang đều xài được - bạn có thể thử con 17HS24-2104S-PG5 mạnh mẽ hơn)
- 1x Puli truyền động GT2 20T 6mm có lỗ 8mm
- 1x Puli không tải GT2 20T 6mm có lỗ 3mm
- Chính xác 46cm dây đai Gates GT2/GT3 với bước răng 2mm (Gates GT2, Gates GT3)
- 1x Chốt tròn 12mm (đường kính 3mm - M3)
- 4x Heatinsert tiêu chuẩn Voron
- 2x Vít FHCS M3x10mm
- 2x Vít FHCS M3x25mm
- 4x Vít BHCS M3x8mm
- 2x Vít BHCS M3x10mm
- 2x Vít BHCS M3x12mm
- 2x Vít BHCS M3x16mm
- 2x Vít BHCS M3x25mm
- 2x Vít BHCS M3x35mm
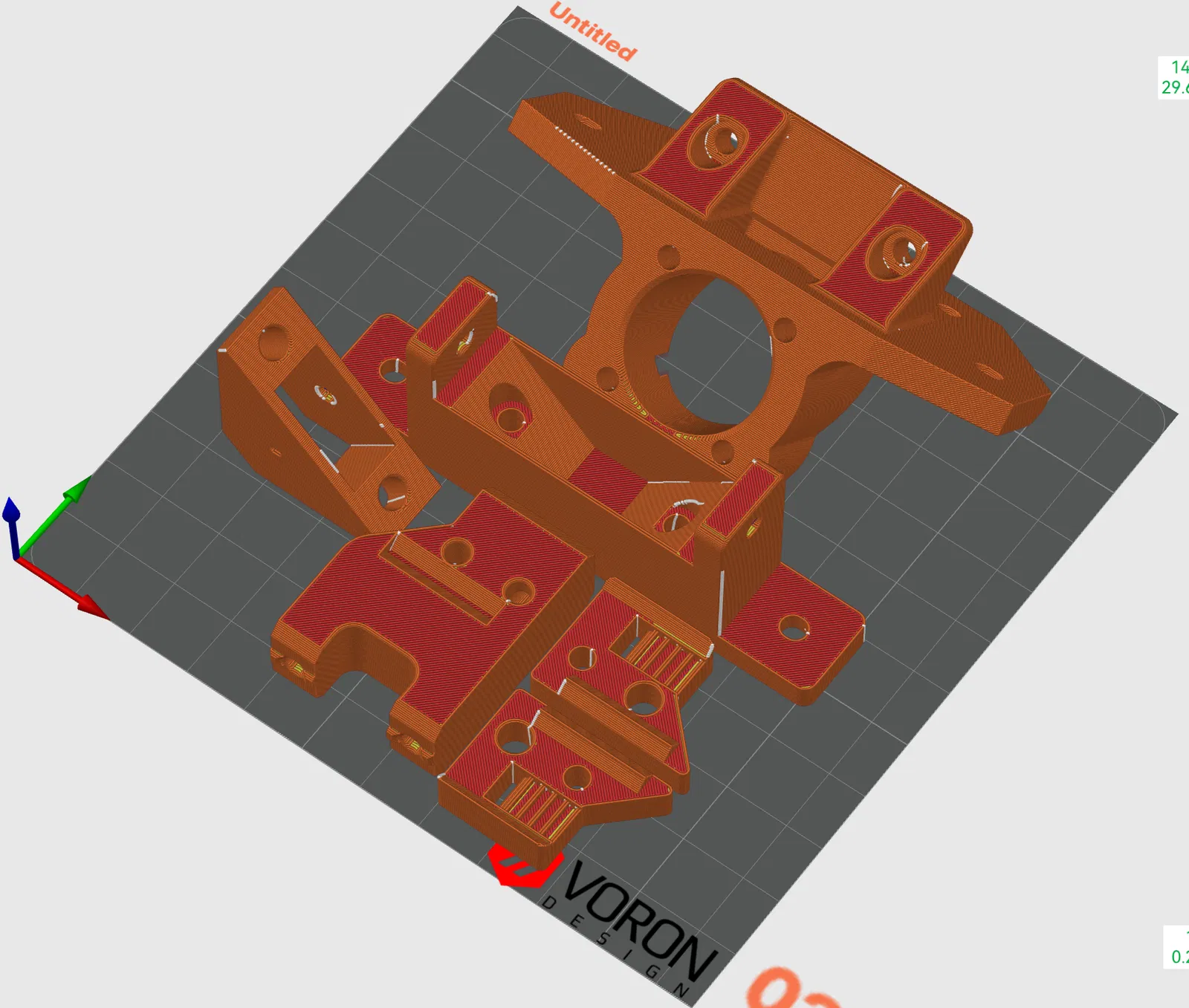
Hướng dẫn in:
In tất cả các bộ phận (chọn bàn Stock hoặc Kirigami) với ít nhất 4 lớp tường và 40% infill. Các bộ phận cần phải thật chắc chắn. In theo hướng mặc định vì các bộ phận đã được định hướng để có độ bền tối đa. V0Belted-BeltHoldTop có 2 phiên bản - một phiên bản có lỗ 3.1mm và một phiên bản có lỗ 3mm cho chốt tròn. Đầu tiên hãy in phiên bản 3.1mm. Nếu bạn không gặp khó khăn khi lắp chốt tròn, thì hãy in phiên bản 3mm. Chốt tròn cần phải vừa khít để nó không bị lỏng trong quá trình hoạt động. Đối với một số bộ phận, bạn có thể gặp vấn đề với độ bám dính giữa các lớp và bị cong vênh. Nếu vậy, hãy sử dụng brim.
Hướng dẫn lắp ráp:
Sử dụng file STEP được cung cấp để kiểm tra nếu bạn gặp bất kỳ khó khăn nào trong quá trình lắp ráp. File STEP cũng bao gồm cả ốc vít.
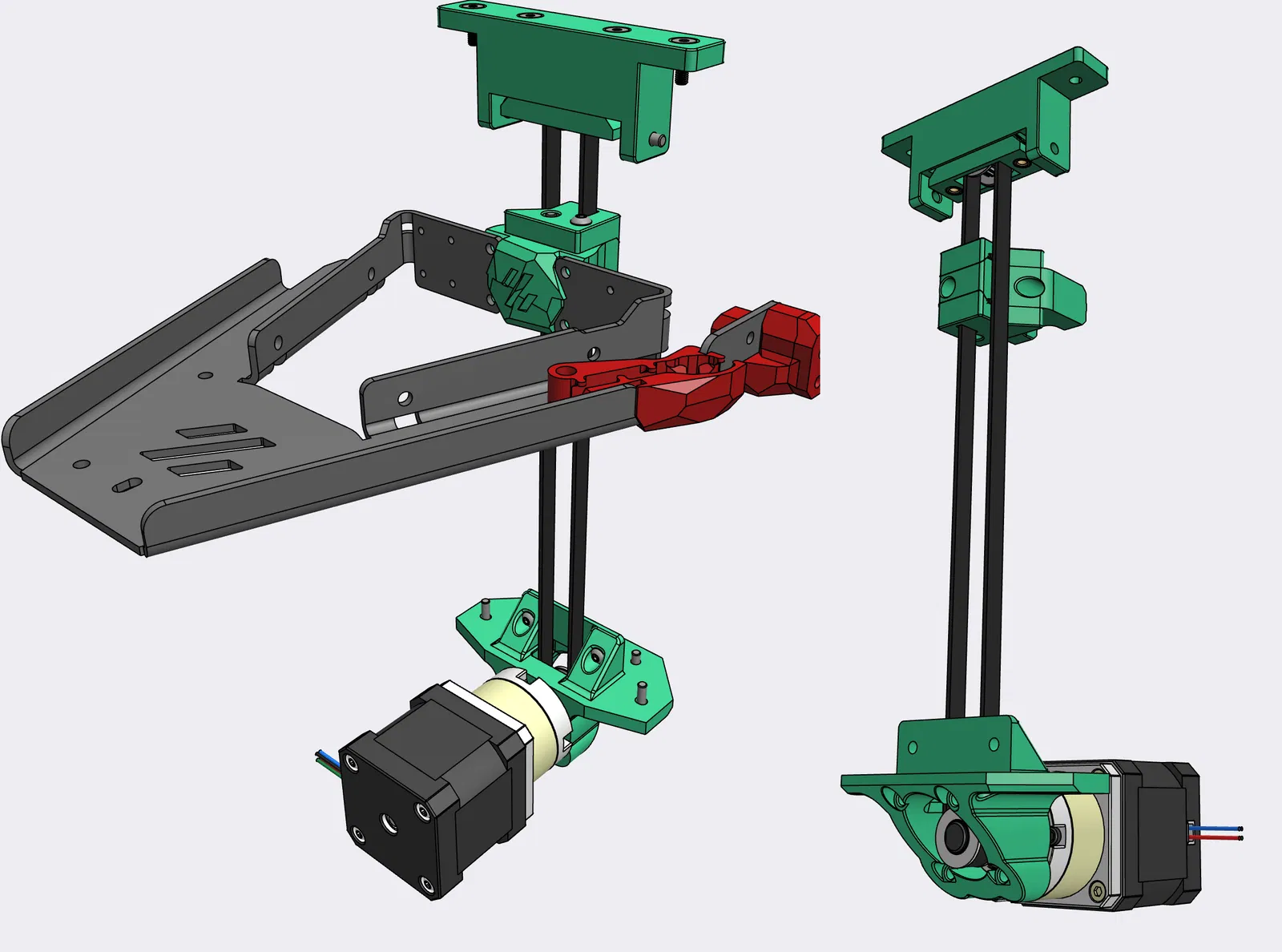
Chuẩn bị motor stepper có bánh răng bằng cách lắp puli truyền động.
Chuẩn bị V0Belted-BeltHoldTop bằng cách lắp heatinsert và puli không tải với chốt tròn.
Lắp heatinsert vào V0Belted-BeltHoldUpper và V0Belted-BeltHoldLower.
Lắp motor stepper bằng V0Belted-StepperPGMount và lắp V0Belted-TopMount ở phía trên. Vít FHCS được sử dụng để lắp V0Belted-TopMount ở phía trên.
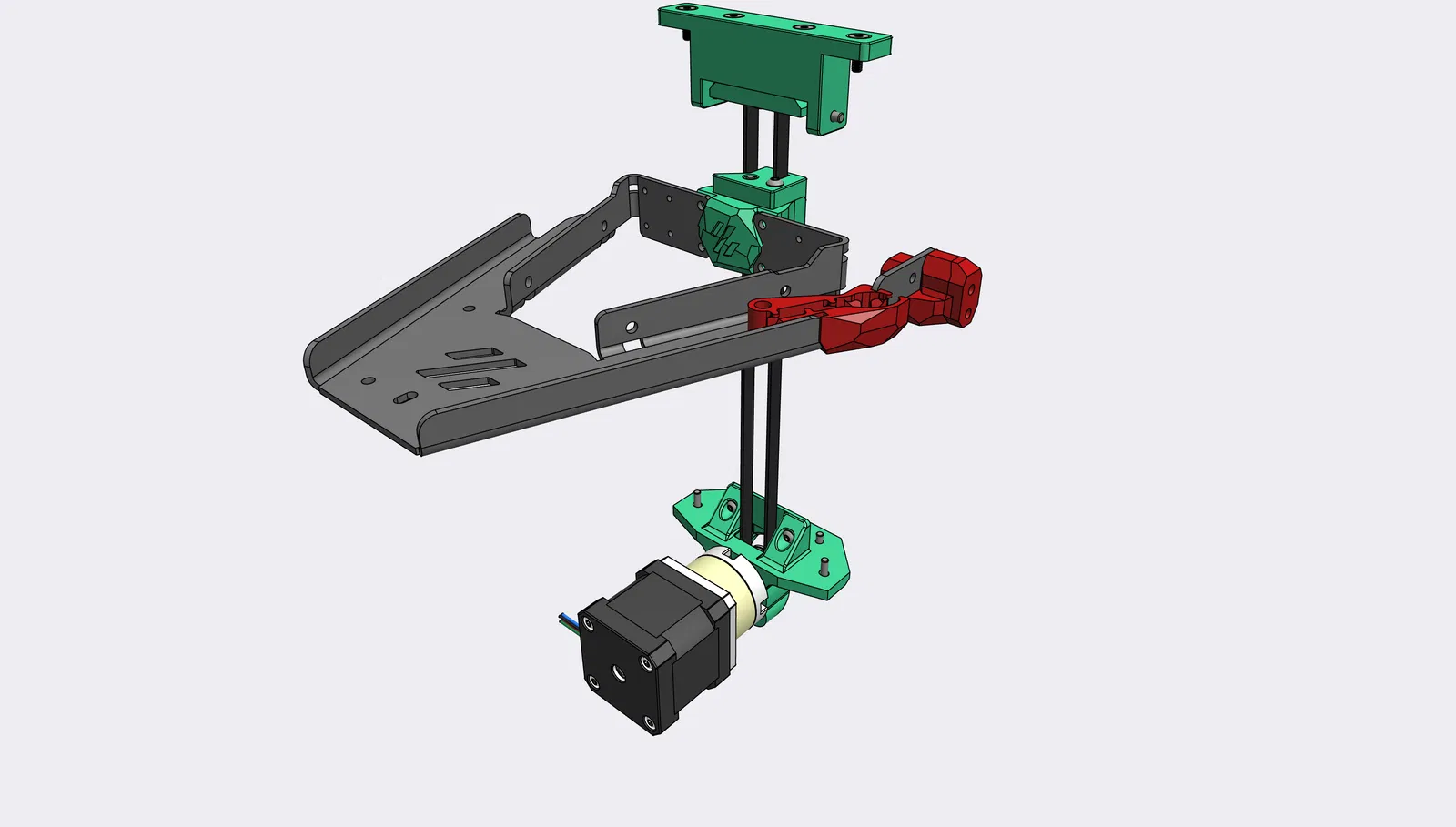
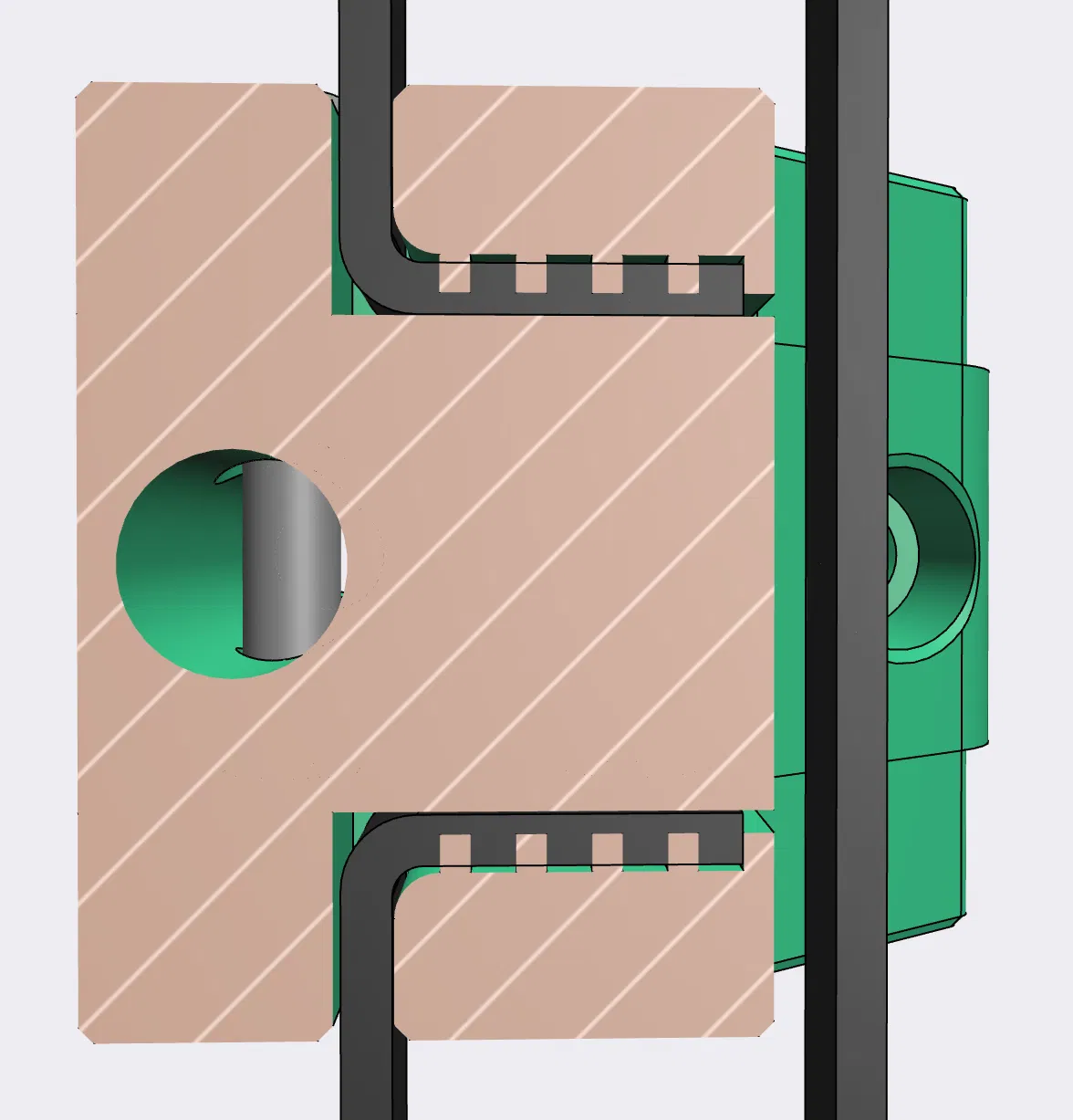
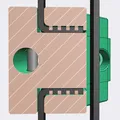
Cắt chính xác 46cm dây đai. Gắn một đầu (sử dụng V0Belted-BeltHoldUpper hoặc V0Belted-BeltHoldLower) - nhưng chưa vặn ốc vội. Tiếp theo, vặn ốc V0Belted-BedAttachment hoặc V0Belted-BedAttachment-Kirigami vào bàn in và chạy dây đai vòng qua. Sau đó, gắn đầu còn lại của dây đai bằng V0Belted-BeltHoldUpper hoặc V0Belted-BeltHoldLower. Khi chạy dây đai qua BeltHold, tham khảo hình ảnh sau:

Dây đai không nên bị lòi ra ở cuối.
Sử dụng vít BHCS M3x25mm để siết chặt khối bao gồm BedAttachment và BeltHoldUpper và BeltHoldLower.
Cuối cùng, sử dụng vít FHCS ở giữa phía trên để điều chỉnh độ căng dây đai gần như đều cho mỗi vít. Di chuyển bàn in lên vị trí cao nhất. Dùng ngón tay gảy dây đai nối motor stepper với bộ phận gắn trên bàn in. Nó nên có tần số khoảng 110Hz để có độ căng lý tưởng.
Cấu hình Klipper:
Nếu sử dụng motor stepper có bánh răng với tỉ số truyền 5:1 như trong BOM:
[stepper_z]
...
rotation_distance: 40
gear_ratio: 57:11
...Bạn cũng có thể tăng tốc độ homing. Trong mục [printer], bạn có thể tăng _max_zvelocity và _max_zaccel.
Nhật ký thay đổi:
RC2:
- Sửa đổi StepperPGMount để không cản trở cổng cấp nguồn
RC1:
- Phiên bản đầu tiên
Giấy phép

File mô hình









Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!